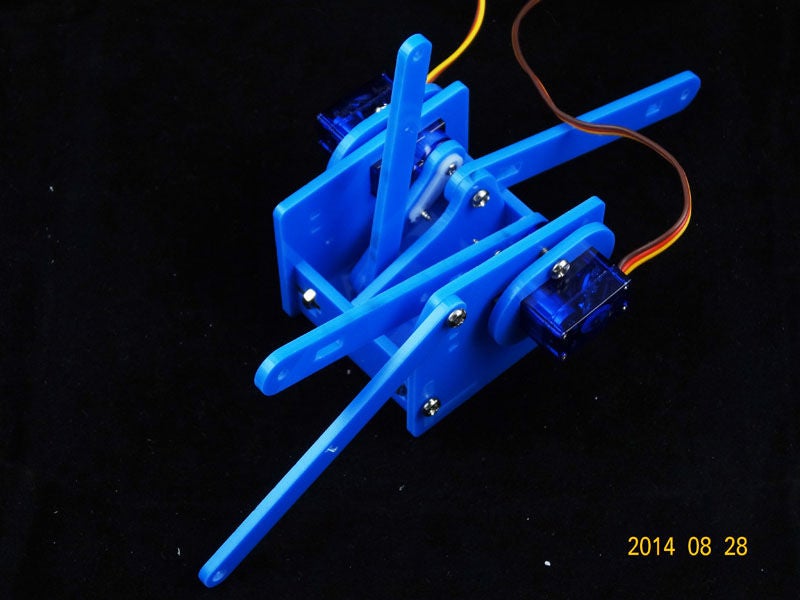
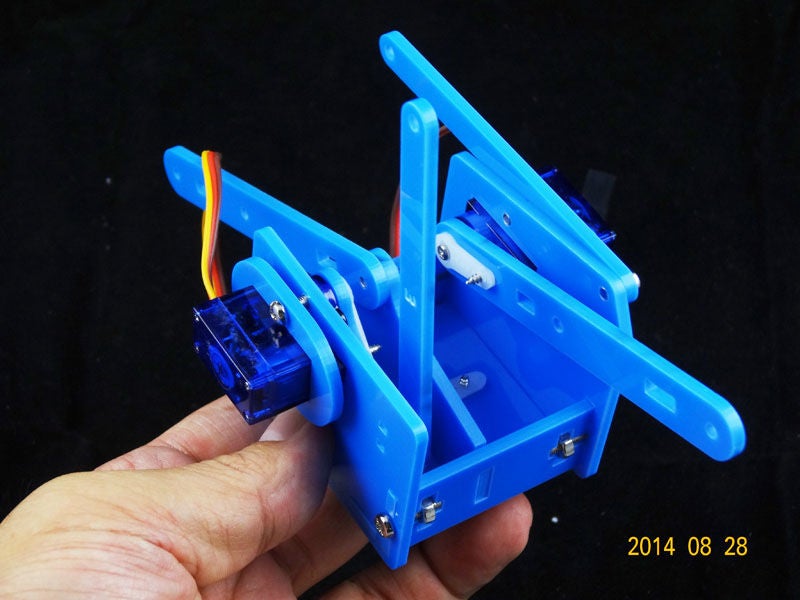
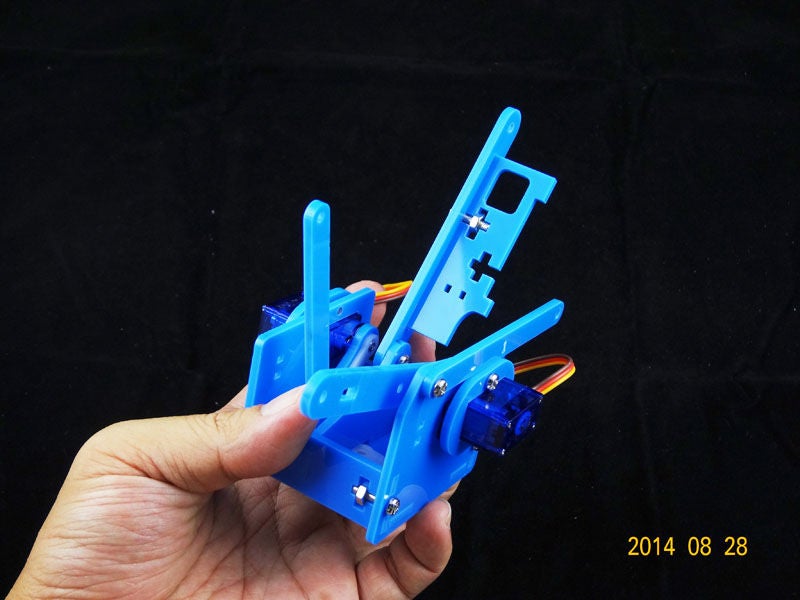
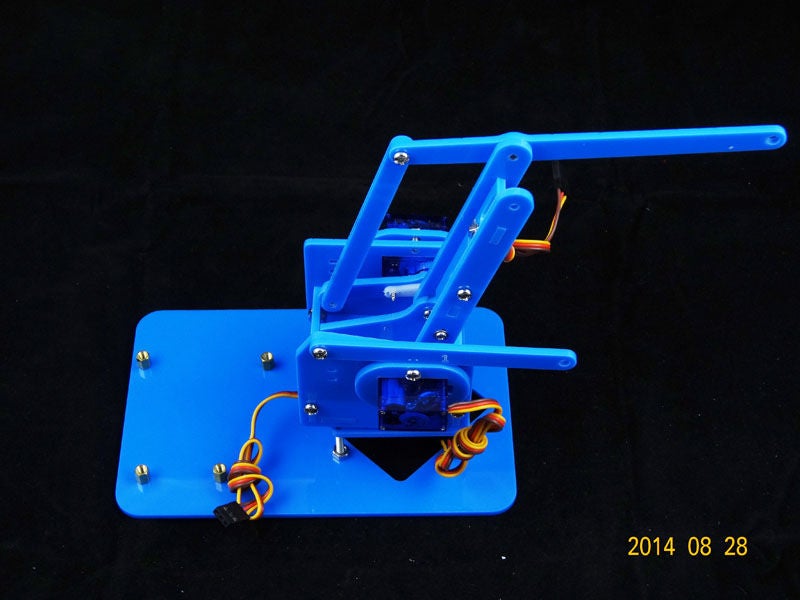
 袖珍型機械臂DIY圖解
袖珍型機械臂DIY圖解

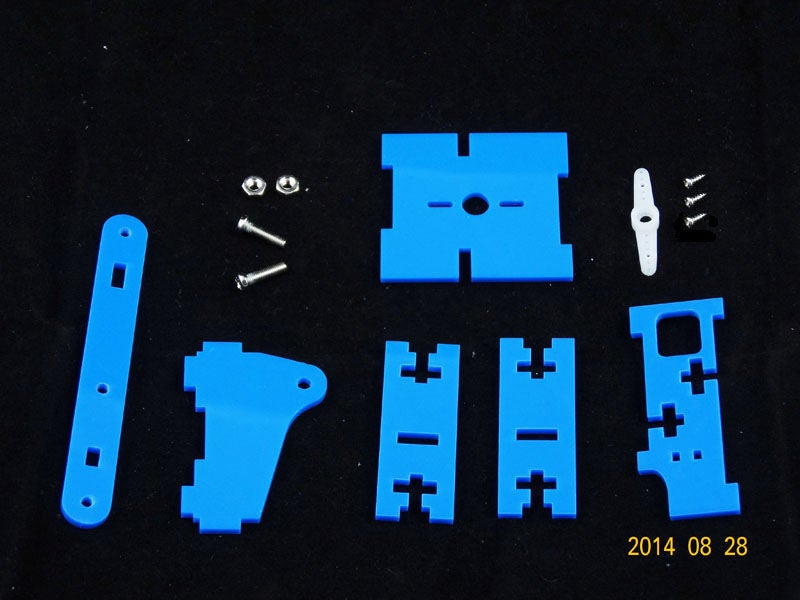
步驟1 :
部分部件有特定備品,例如:螺絲。
(1)壓克力一套(其中直徑一公分圓圈只需1顆)
(2)螺絲(直徑為公制3mm)
(1)20mm x 4
(2)12mm x 6
(3)10毫米x 1
(4)8毫米x 16
(5)6毫米x 8
(6)銅柱x 7
(7)螺帽x 14
(3)伺服馬達x 4
(4)Arduino主板x 1
(5)搖桿擴展板x 1
(6)橡膠墊x 4
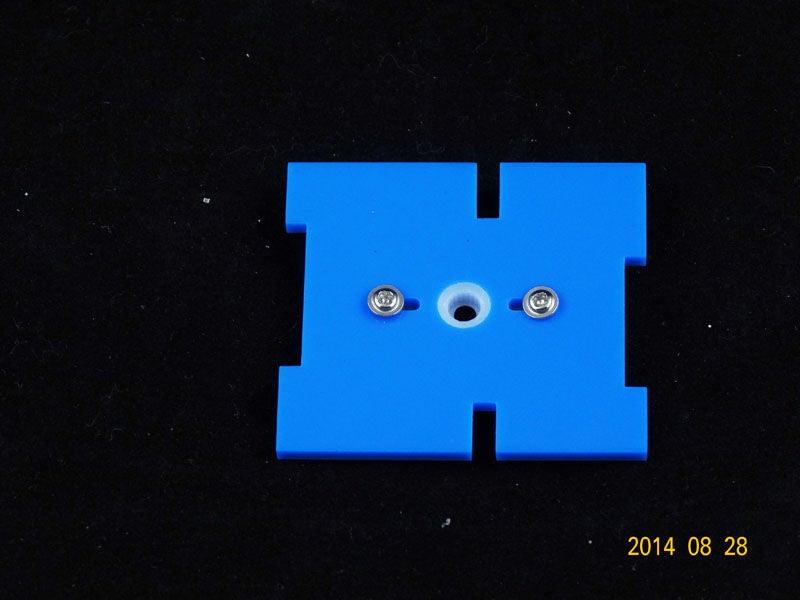
步驟2:底座
所需螺絲:
(1)20mm x 4
(2)銅柱x 4
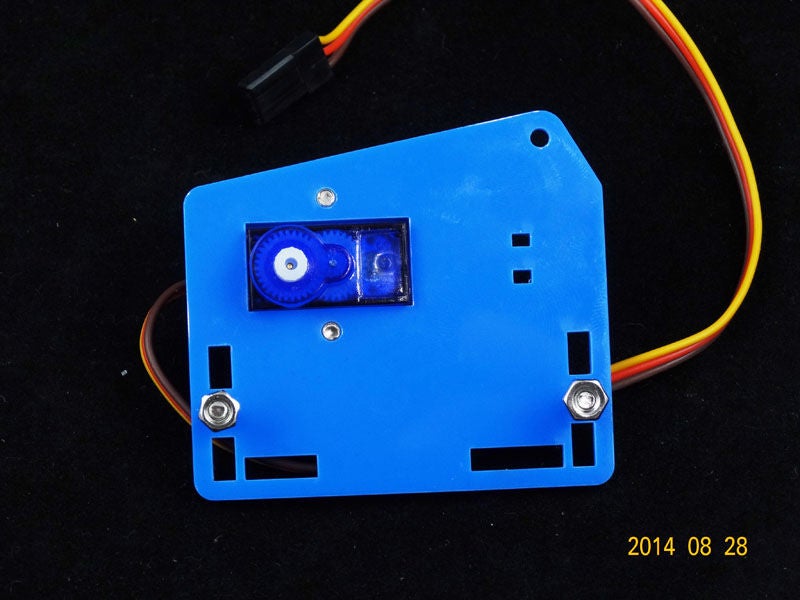
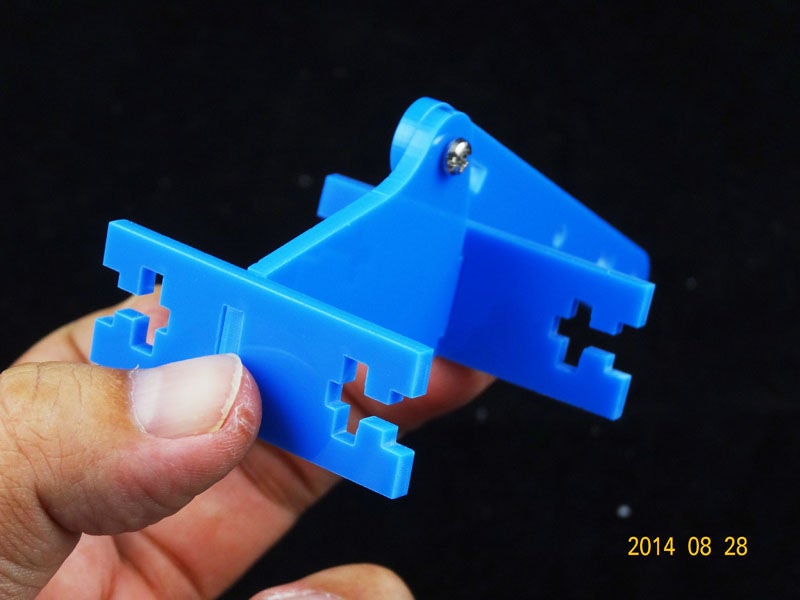
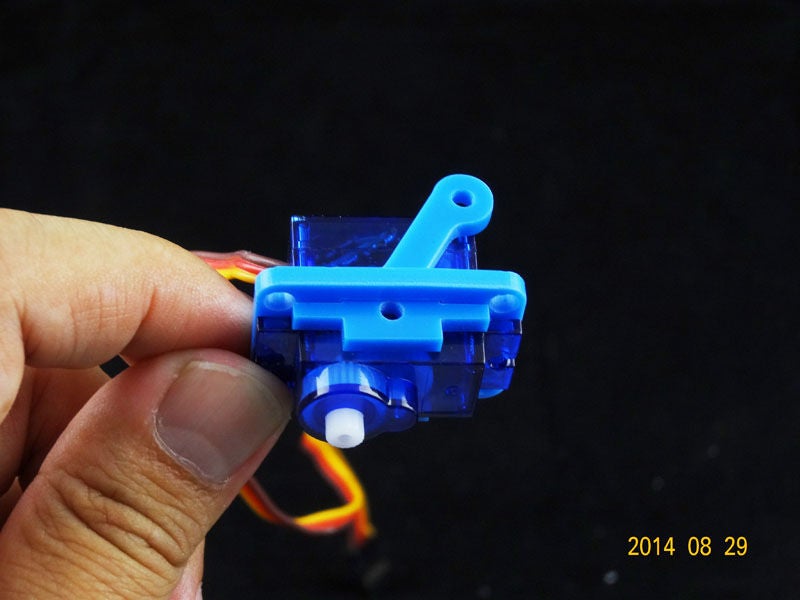
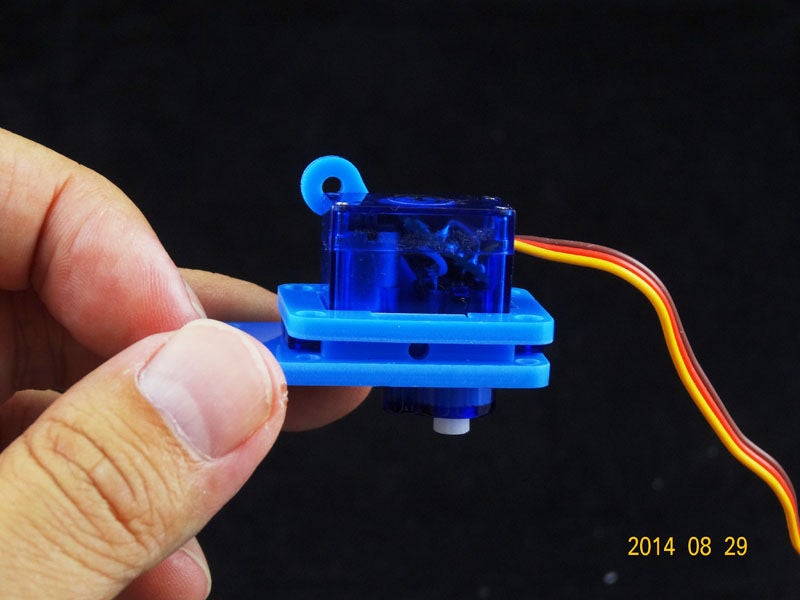
步驟3:第一顆馬達
注意:如下一,第一顆鉆石要選4顆中白色軸心最長的。裝每一顆寶石時,角度都有講究,記得要遵循說明組裝喔(有講究的意思是馬達自由角度僅1?179度,只能轉半圈,故要確保范圍內的旋轉自由度)。
所需螺絲:結果(1)8毫米x 2
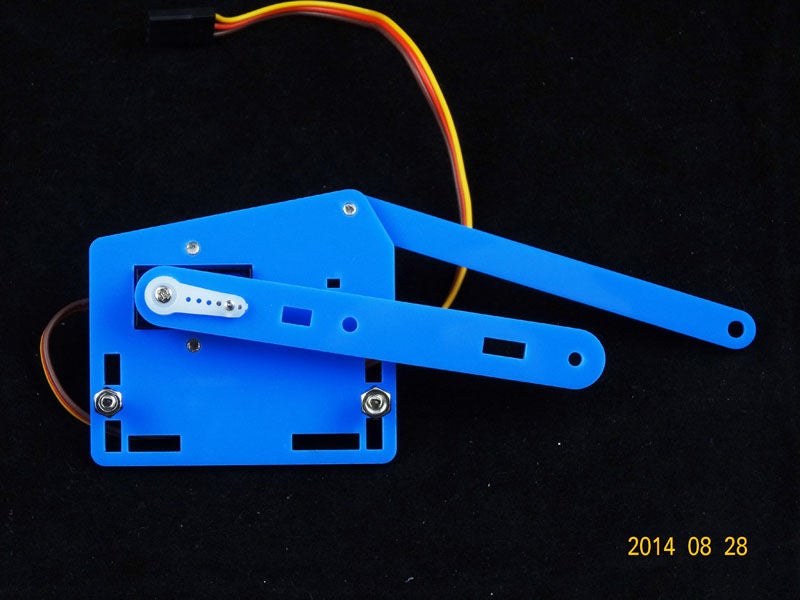
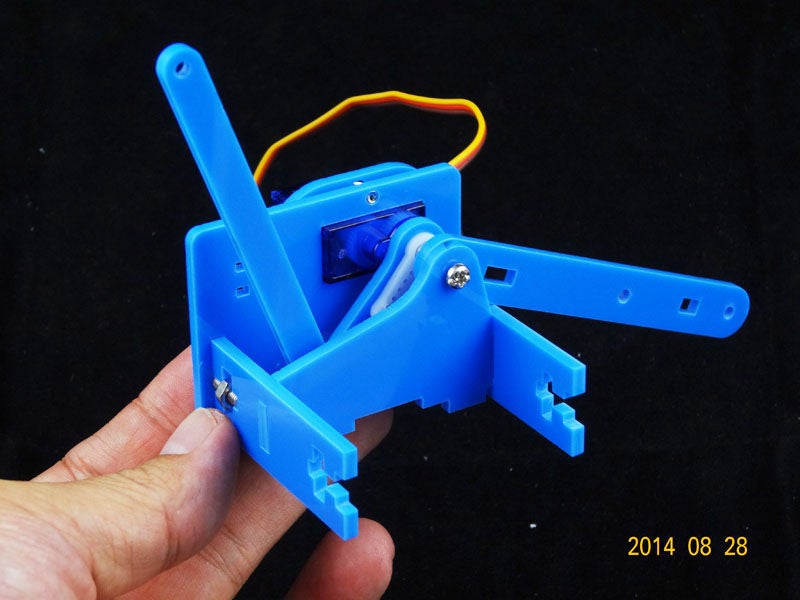
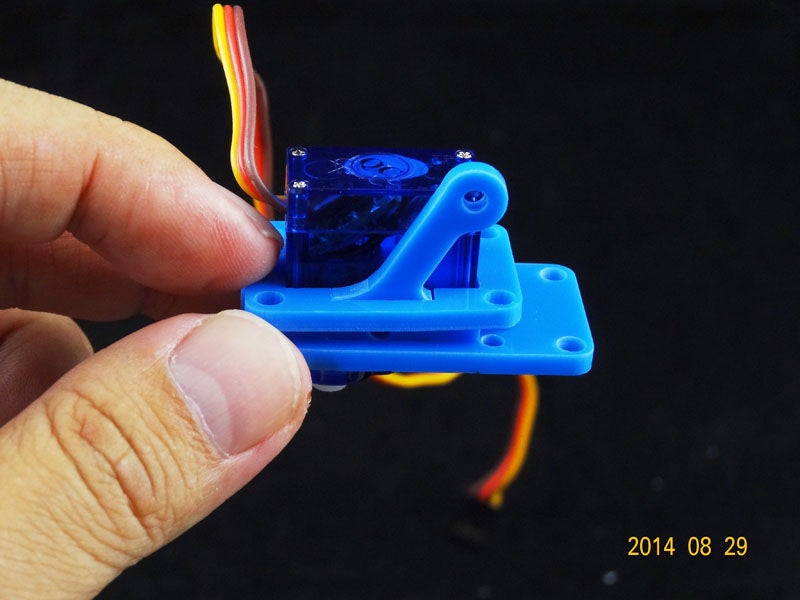
步驟4:左臂




此步驟重點是馬達角度調整,請先為馬達套上小白套,“順時鐘”旋至不能旋為止,再裝成倒數第4張圖,然后再“逆時鐘”轉成倒數第3張圖。
(其長桿號碼為3,小圓圈不需放上,若孔洞太松,則建議使用螺絲螺絲鎖通再配合螺帽)
所需螺絲:
(1)12mm x 2
(2)8mm x 2
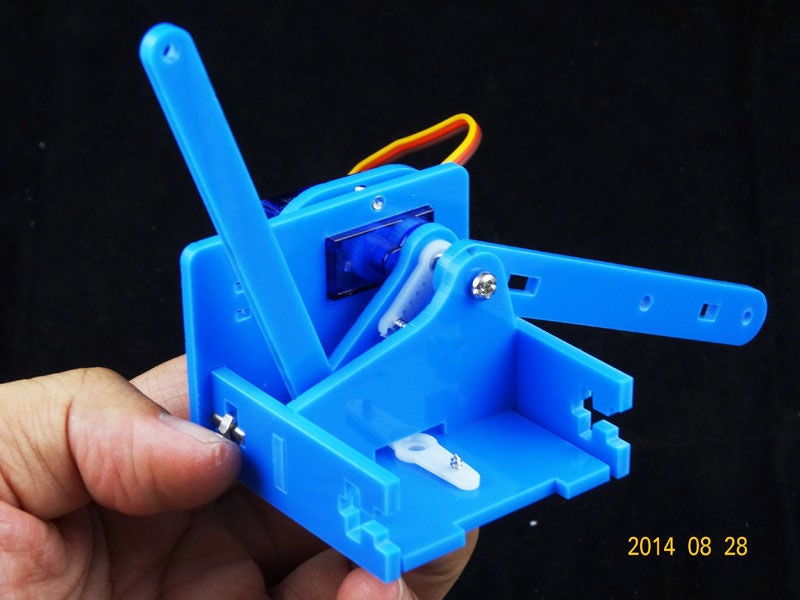
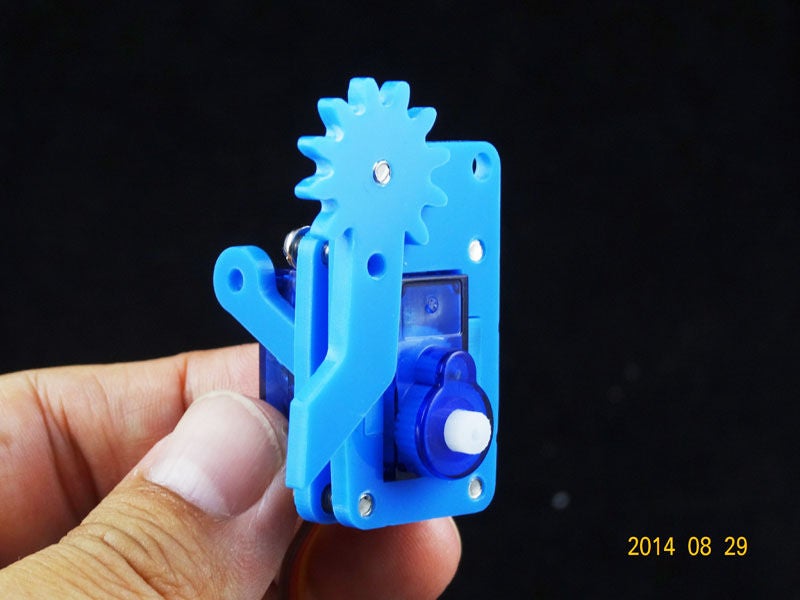
步驟5:右臂


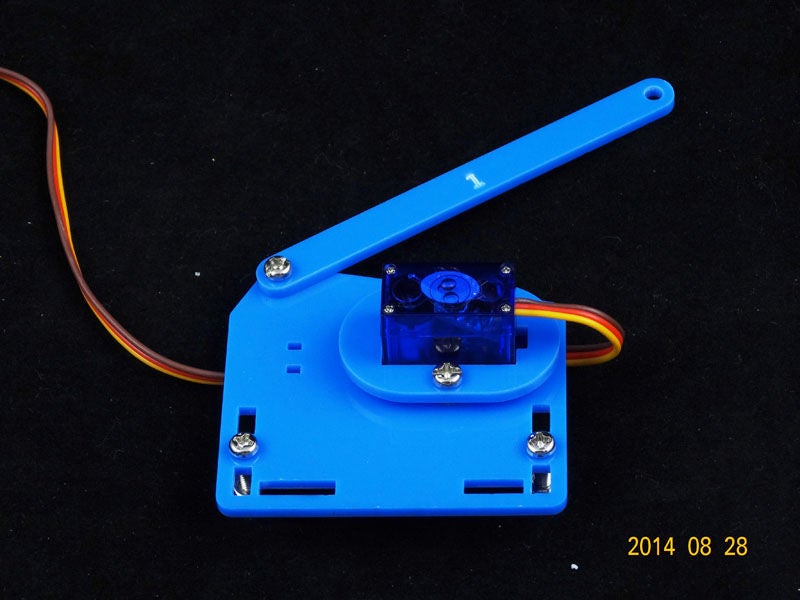
此步驟重點也是馬達角度調整,請先為馬達套上小白套,“順時鐘”旋至不能旋為止,再裝成如最后一張圖的3點鐘角度,之后就可自由轉動
(其中長桿號碼為1)
所需螺絲:
(1)12mm x 2
(2)8mm x 2
(3)6mm x 1
步驟6:左臂+底盤


倒數第2張圖合體后,再慢慢鎖緊螺絲,最后才上底盤。
所需螺絲:
(1)12mm x 2
(2)6mm x 1
步驟7:右臂+底盤

稍微套上再鎖緊螺絲,手要巧。
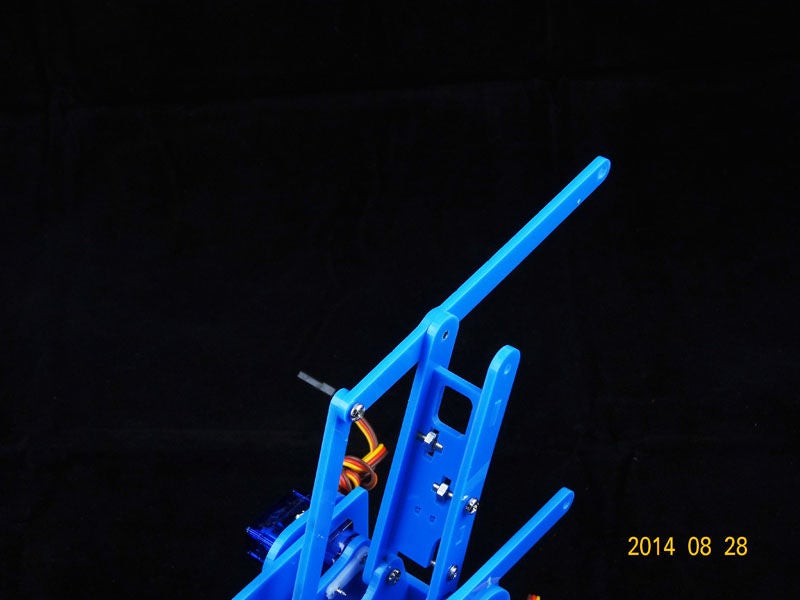
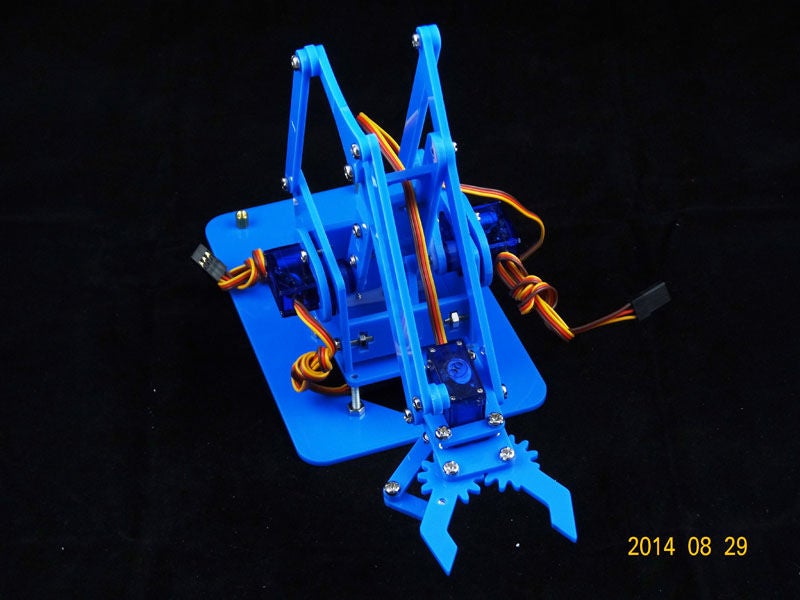
步驟8:中間支架


螺帽微微套上后再套支架,卡入后再鎖緊螺絲。
所需螺絲:
(1)12mm x 2
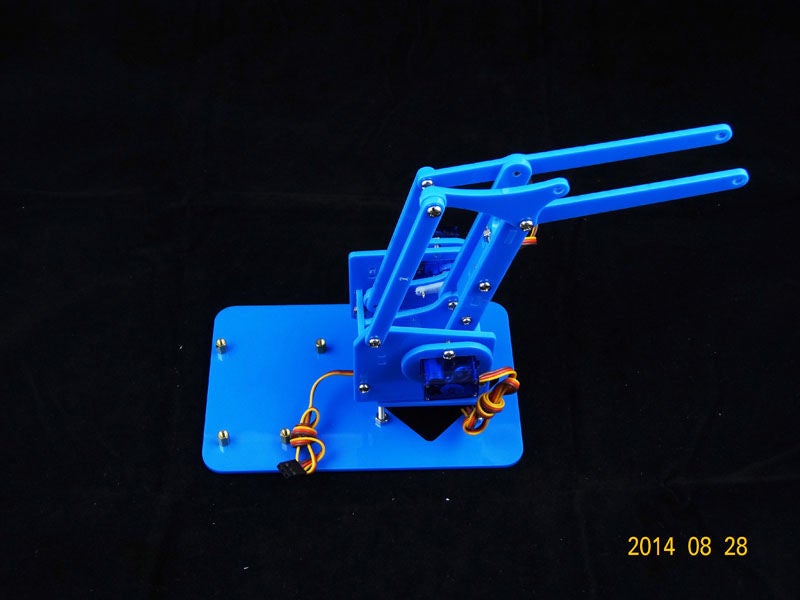
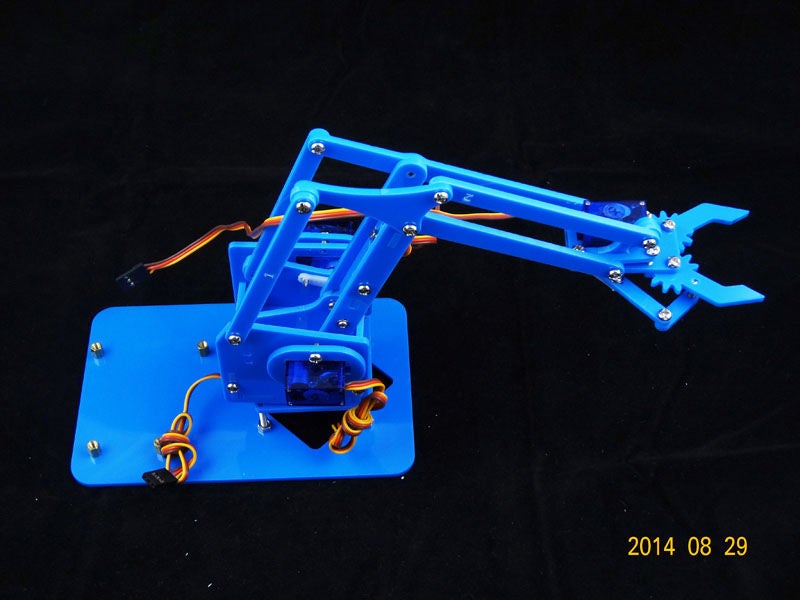
步驟9:與機箱合體

套上后“順時鐘”轉至極至,再合體成3點鐘方向,之后可以任意旋轉。(記得要鎖上馬達中間螺絲喔。)
步驟10:支桿一

所需螺絲:
(1)6毫米x 2
步驟11:支桿二
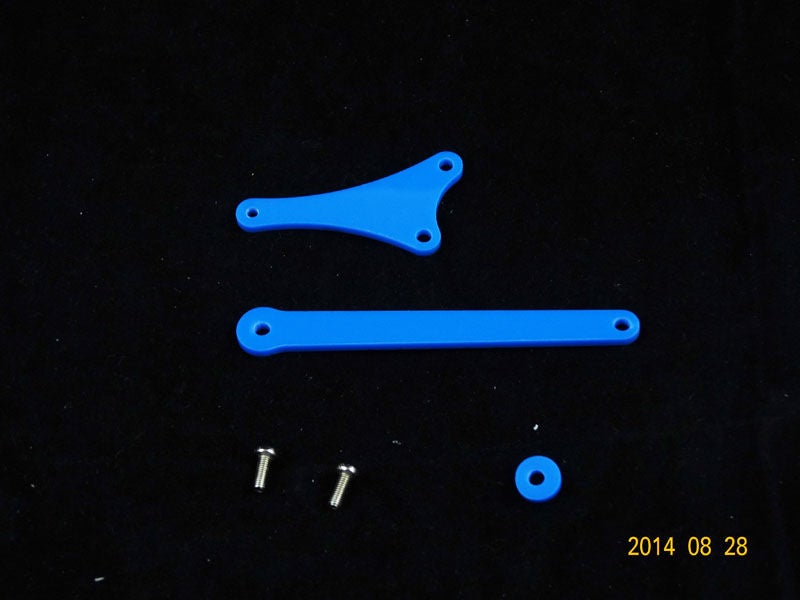


長桿號碼為2(其中小圓圈不需放上也,若孔洞太松,則建議用螺絲刀鎖通再配合螺帽)
所需螺絲:
(1)8毫米x 1
(2)6毫米x 1
步驟12:最后一顆馬達




所需螺絲:
(1)8mm x 4
步驟13:夾具一

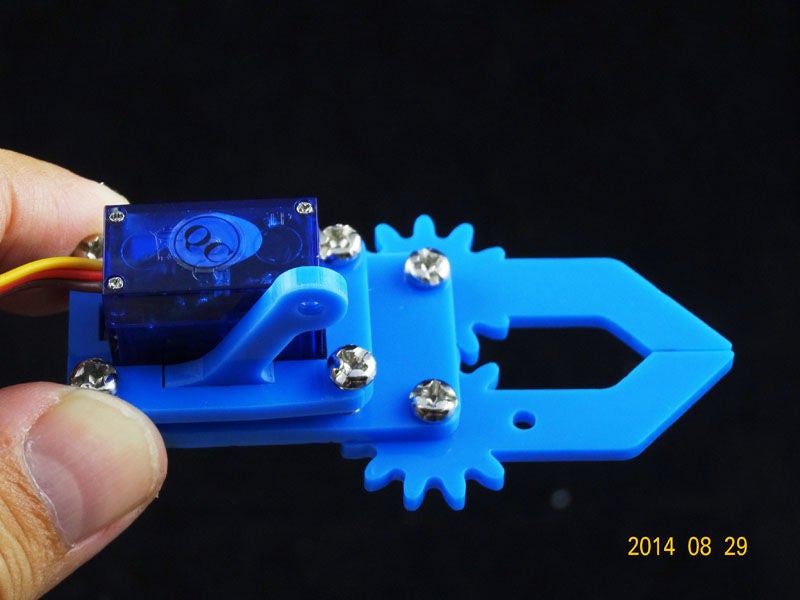

所需螺絲刀:
(1)8mm x 1
(2) 6mm x 3
步驟14:夾具二

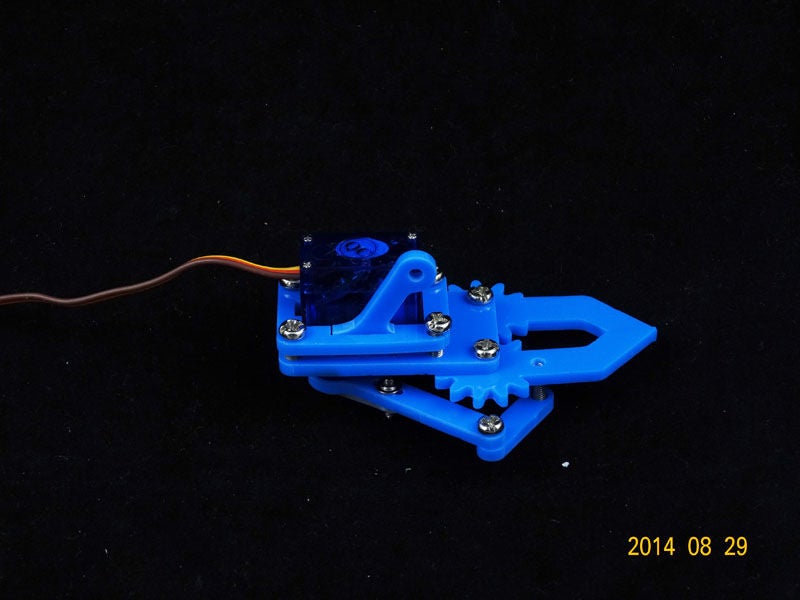
此步驟重點是馬達先“順時鐘
第15步:上夾具
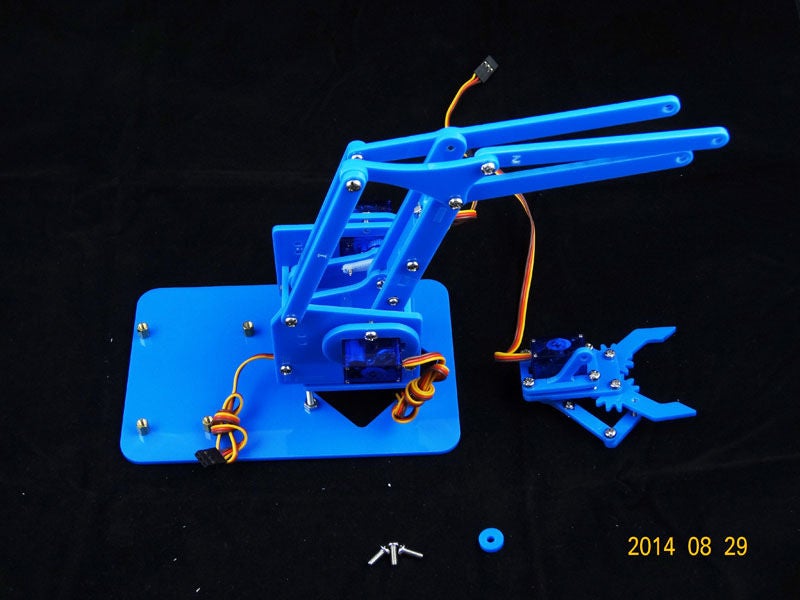


步驟16:最后來上控制板

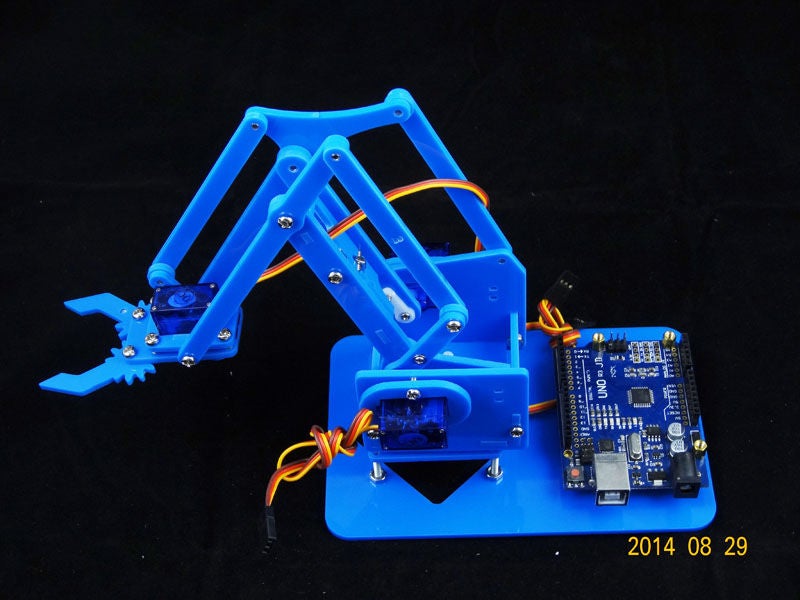
注意順序并注意排線顏色,其中這樣的meArm.Joystick主體就大功告成啦。
步驟17:藍牙升級套件
有買藍牙升級套件的請參考此步驟:
使用藍牙前要先跟手機配對,之后再打開meArm_bt APP,點擊紅色藍牙圖示來跟藍牙連線,若有成功連線,則藍牙板上紅燈就長亮而不閃爍,而且APP的藍牙圖示也會變成藍色,這時就可用手機操控手臂了,結束時記得再按一次APP上的藍牙圖示離線喔。之后每次開APP要操控手臂時就只要連線即可,不用再配對了。
注:
1。藍牙板為HC﹣06,baurate已調成38400
2。腳位使用:RX / DX = 12/13(在Arduino中就算上傳程序也不用拔掉藍牙卡)
4 。安裝藍牙APP,請下載本步驟附件的meArm_Joystick.apk
5。若您的手臂為舊版的,請升級UNO主板的主程序喔meArm_bt.ino
6。藍牙APP也可按此由Google Play下載。
步驟18:故障排除
(1 )問:為什么搖桿上的黃燈一直閃一直閃
(答)正常情況下,主板LED燈會長亮,但因為Arduino電路板電流負荷過大,導致主板一直重開機。原因可能是因螺絲鎖太緊馬達轉不動或馬達
解決方式:
(A)放松螺絲,寧愿整組看起來散散
(B)拔掉全部馬達線,再一條一條插上測試
(C)如果夾具超過范圍卡住回不去,則輕
(2)問:為什么手臂整個會吱吱叫??
(答)理由同上,因為主板重復
(3)問:為什么一開機,手臂會卷成奇怪的角度,或整團縮在一起?
(答)手臂出廠時,每顆馬達都會有預設角度,如果組裝時沒按照標準步驟調整馬達角度,則開機時整臺手臂就會變得很畸型
解決方式:
( A)整臺手臂砍掉重練,或
(B)在軟體中更改馬達初始角度
(4)旋臂與底座馬達不易咬合,點擊(答)底座馬達不易吃整只旋臂,原因通常是咬合不易,建議先將旋臂最底部正方型壓克力片先獨立出來與馬達試咬合,待有手感時再重新組裝試整只旋臂。
( 5)馬達螺絲似乎有短少
(答)為更方便組裝馬達,我們已將馬達螺絲統一替換小型螺絲,若僅有短少,請隨時聯系我們。
-
機械臂
+關注
關注
13文章
553瀏覽量
25322
發布評論請先 登錄
GZCOM-NET:為機械臂測試帶來高效無線解決方案!

專為機器人教育而設計的創客友好型機械臂

如何使用PLC控制myCobot 320機械臂

使用myCobot 280機械臂結合ROS2系統搭建機械分揀站

深度解析!RK3568 加持機械臂是如何實現顏色識別與抓取的?

RK3568國產實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!
“雙保險”鎖緊機制:YM28系列連接器為機械臂提供高牢靠的大電流連接

機械臂的高效運作,連接器起關鍵作用
工業產線機械臂數字孿生 流程工業應用

【原創】 drawbot 平面機械臂scara寫字畫畫機器人DIY教程貼
OrangePi AIpro應用:機械臂應用開發指南

工業機器人和機械臂的設計、功能和應用有哪些區別?
奧比中光推出2.0版大模型機械臂
大象機器人開源協作機械臂機械臂接入GPT4o大模型!






 工商網監
工商網監
評論