") 帶有紅外傳感器且無(wú)微控制器的機(jī)器人避障的制作圖解
帶有紅外傳感器且無(wú)微控制器的機(jī)器人避障的制作圖解

步驟1:收集組件
收集這些組件:
1)1K電阻器
2)10K電阻器
4)紅外發(fā)射器LEDs
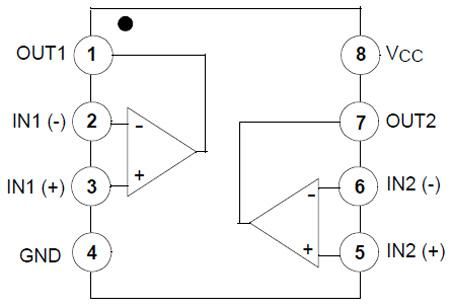
5)LM358N運(yùn)算放大器IC
6 )10K TRIMPOT
7)8針集成電路邏輯芯片插座
8)3針電線連接器
主電路:
9 )IC 7407十六進(jìn)制逆變器IC
10)IC L293D電機(jī)驅(qū)動(dòng)的IC
其他部件:
11)12V減速電機(jī)
12)輪子
13)制造車身用紙
14)電機(jī)支架(管道支架)
15)腳輪
16)2針導(dǎo)線連接器
17)電池
18)電池座
19)開關(guān)
20 )跳線
21)Verroboard
22)烙鐵
23)焊絲
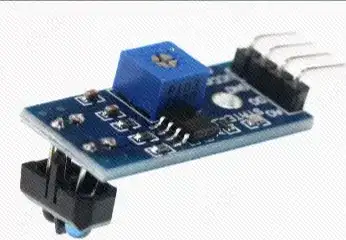
步驟2:制作IR傳感器模塊

好,所以我們將所有零件都收集到LETS START BUILDING 。.. !!
首先,我們將使IR傳感器具有電路圖。
測(cè)試傳感器:
連接電池,可以使用9V電池沒(méi)關(guān)系。它不會(huì)損壞IC LM358N,現(xiàn)在將手移向IR接收器,當(dāng)您的手靠近IR發(fā)射器時(shí),引腳1上的LED會(huì)發(fā)光。紅外發(fā)射器LED應(yīng)當(dāng)稍微向紅外接收器LED傾斜,并且不應(yīng)平行。因此,從紅外發(fā)射器發(fā)射到物體后的紅外線應(yīng)反射到接收器,因此插針1上的LED發(fā)光。注意,為了準(zhǔn)確起見,我在IR接收器LED上使用了兩個(gè)IR發(fā)射器LED。
步驟3:制作主電路
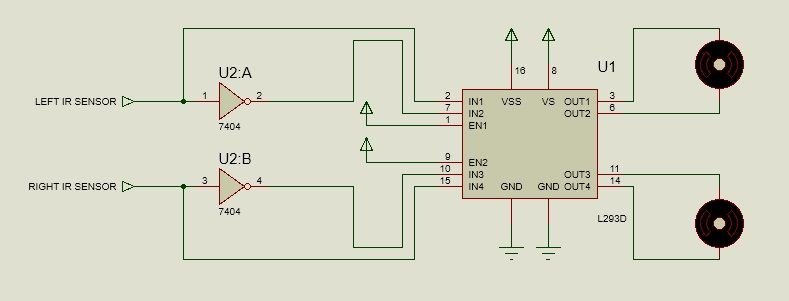
給出了主電路的電路圖。
構(gòu)建完此主電路后,將其連接到兩個(gè)紅外傳感器模塊電路,如圖所示。
步驟4:制作主體
我沒(méi)有將主體制成特殊的東西,只是使用了一塊丙烯酸板并粘貼了
我用管道固定器將電機(jī)固定在丙烯酸板上。
步驟5:組裝
組裝所有部件,并將兩個(gè)IR Sensor Module與主電路連接。并將其放在機(jī)器人的身上。連接交換機(jī)。紅外傳感器應(yīng)該與輪胎處在同一水平,如圖所示。
您一定想知道為什么我要使用兩節(jié)9v電池。當(dāng)我完成機(jī)器人的安裝后,我注意到機(jī)器人在使用+ 9V電池時(shí)甚至速度很慢(因?yàn)槲沂褂玫氖?2V減速電機(jī)),所以我又添加了一個(gè)+ 9V電池。所以現(xiàn)在我有兩節(jié)電池,兩個(gè)都是+ 9V,一個(gè)是新電池,另一個(gè)是我認(rèn)為8+伏的電池。我把兩者都加了,所以我在17伏特以上得到了9 + 8。現(xiàn)在,機(jī)器人正在高速運(yùn)行。
步驟6:進(jìn)行跟蹤
如果需要,可以進(jìn)行跟蹤如圖所示,我使用了張紙。
-
微控制器
+關(guān)注
關(guān)注
48文章
7939瀏覽量
154503 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29673瀏覽量
212533 -
紅外傳感器
+關(guān)注
關(guān)注
9文章
543瀏覽量
48318
發(fā)布評(píng)論請(qǐng)先 登錄
AGV機(jī)器人如何實(shí)現(xiàn)毫秒級(jí)避障?深度解析多傳感器融合的核心技術(shù)

【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
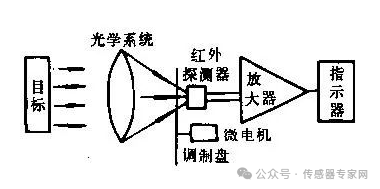
紅外傳感器原理與應(yīng)用
艾邁斯歐司朗Belago紅外LED,助力Supernode打造避障掃地機(jī)器人

紅外傳感器的工作原理及應(yīng)用
Sonair推出用于機(jī)器人避障的3D超聲波傳感器
紅外傳感器和超聲波傳感器有什么區(qū)別
CW32模塊使用 紅外循跡傳感器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論