 移動機器人為什么要進行校零,工作過程分析
移動機器人為什么要進行校零,工作過程分析

最近在校正C2機器人時遇到了一個小事故,機器人的EMT壞了,反復校正零點報校正超時。
今天我們就聊聊C2機器人的校零。
為什么要校零?
1.當機器人校正的時候,各個軸就可以運動到一個特定的機械位置,也就時所謂的機械零點。
2.一旦機器人運動到機械零點,各個軸上的絕對編碼盤的值就被保存下來了。
機器人零位校正后,可以用直角坐標系移動機器人或運行程序; 同時機器人也知道軟限位的位置。
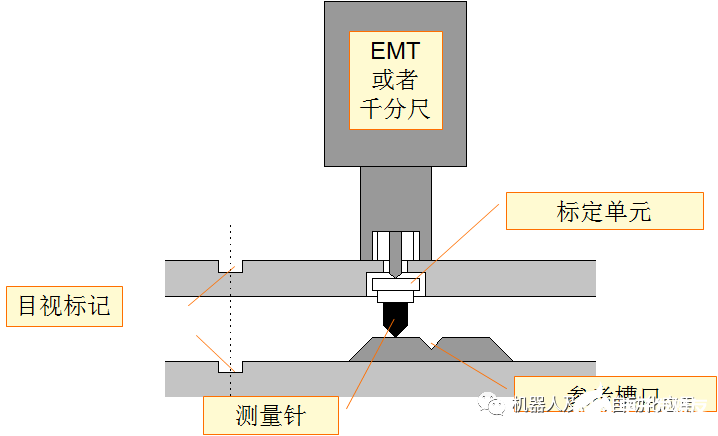
校零裝置:
1.EMT
2.千分表
控制運行過程示意:
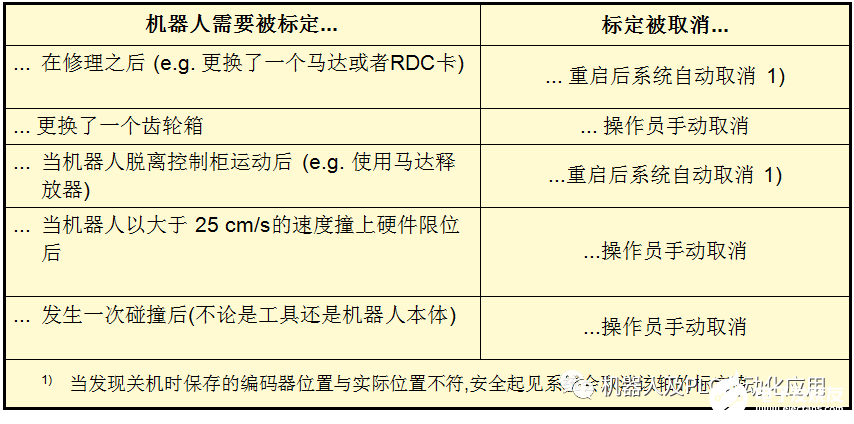
重新標定的情況:

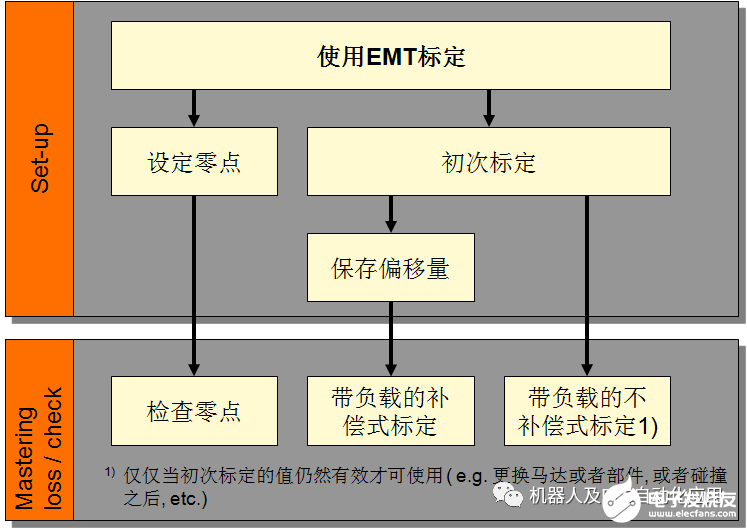
使用EMT標定:
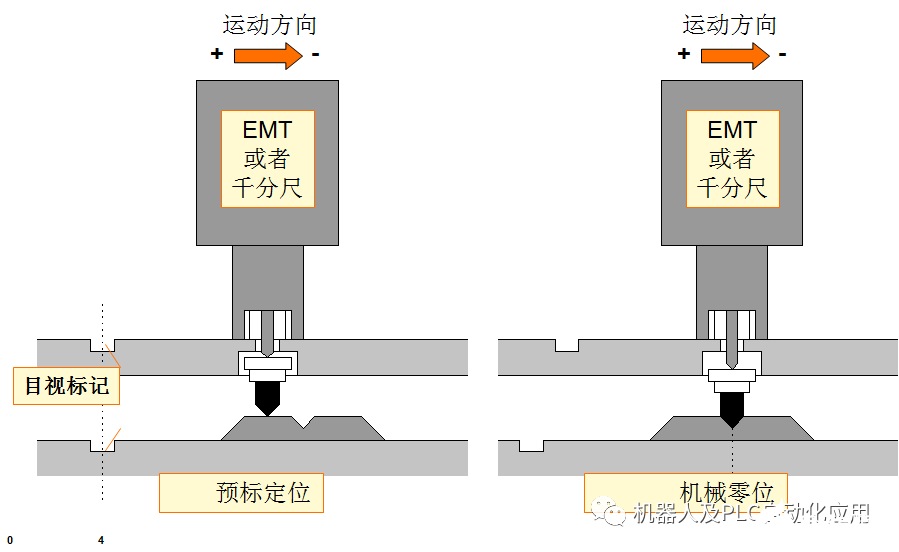
?把需要標定的軸移動到預標定位 (如圖所示白線位置)
?使用軸坐標系移動機器人各軸
?每個軸的標定是獨立的

?從1軸開始往上標定
?每個軸總是從正向往負向運動
?僅僅在T1模式下!

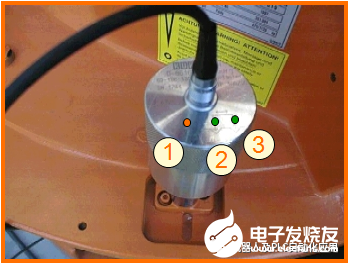
?摘掉標定單元的保護蓋
?接上EMT 并連上信號線(另一端連接到 機器人底座上的連接盒接口 X32上)

?EMT上有三個指示燈:
1. 紅色 - 錯誤
2.綠色 - 下降沿
3. 綠色 - 上升沿
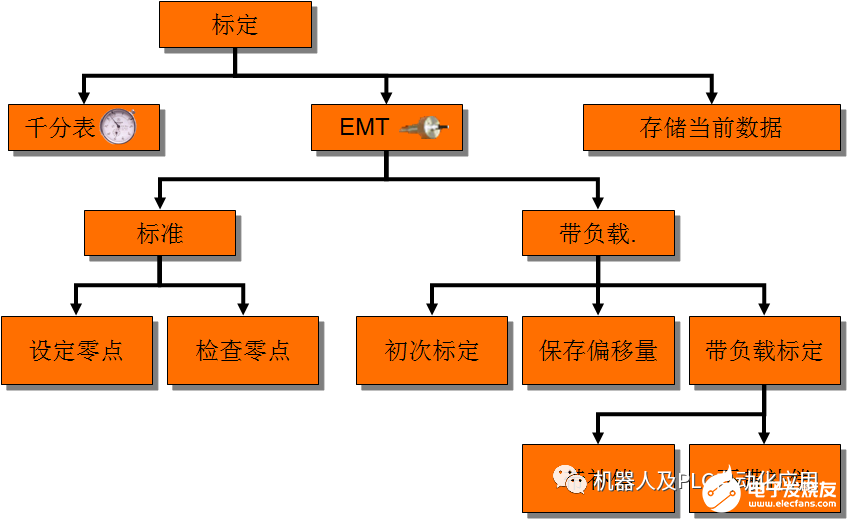
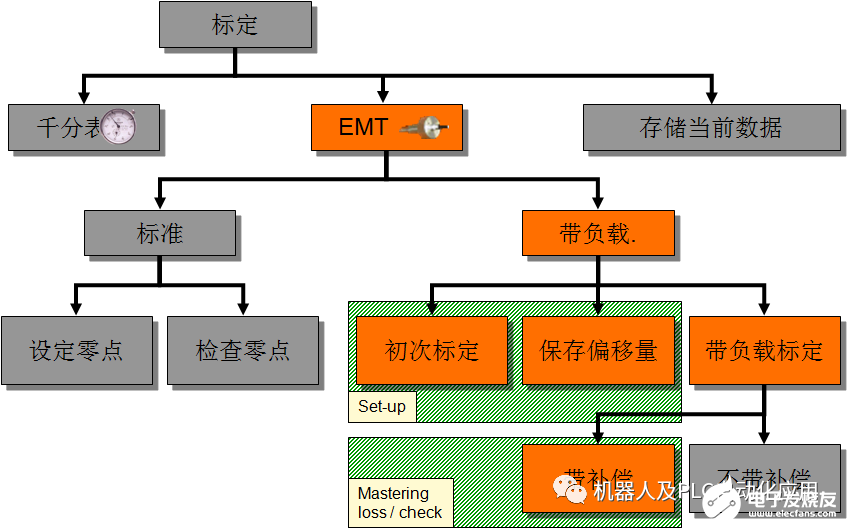
標定菜單:
對于精確定位機器人的標定:
責任編輯:pj
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29667瀏覽量
212525 -
編碼
+關注
關注
6文章
968瀏覽量
55707 -
校正
+關注
關注
0文章
48瀏覽量
14194
發布評論請先 登錄
相關推薦
熱點推薦
瑞芯微 RK3568/3588:為移動機器人注入智慧動力引擎
; 商用服務機器人: 如配送、清潔、導覽機器人,活躍于酒店、餐廳、商場、醫院,提供便捷服務; 特種移動機器人: 如安防巡檢、農業作業、災難救援機器人,在復雜或危險環境中替代人
輪式移動機器人電機驅動系統的研究與開發
【摘 要】以嵌入式運動控制體系為基礎,以移動機器人為研究對象,結合三輪結構輪式移動機器人,對二輪差速驅動轉向自主移動機器人運動學和動力學空間模型進行
發表于 06-11 14:30
安森美在自主移動機器人領域的發展成果
在4月初落幕的“OFweek 2025(第十四屆)中國機器人產業大會”上,安森美(onsemi)AMG戰略業務拓展高級經理Henry Yang發表“從芯片到應用:安森美自主移動機器人(AMR)技術方案剖析”主題演講,為與會觀眾介紹安森美在AMR領域的發展成果。
2024移動機器人市場風云:新玩家批量涌現,是挑戰還是機遇
新玩家,新玩法? 文|新戰略在科技飛速發展的當下,移動機器人領域正經歷著一場變革。2024 年,這個市場又迎來了一批新玩家,他們的加入,讓原本就充滿活力的移動機器人市場變得更加熱鬧非凡,同時也預示著
移動機器人核心科技解碼:導航、感知與掌控力的深度剖析
富唯智能移動機器人的核心技術主要包括導航、感知與控制。這些技術共同決定了移動機器人在不同環境中的自主行動能力和工作效率。
自主移動機器人設計指南
自主移動機器人(AMR)是一種復雜的系統,與自動駕駛汽車有許多共同之處--它們需要感知、電機驅動、電源轉換、照明和電池管理。也許最大的挑戰是將這些子系統整合到一個最終產品中--由于需要集成來自不同供應商的不同子系統,這一挑戰變得更加困難。

宜科電子榮獲雙年度移動機器人行業優質供應鏈獎
近日,在第七屆移動機器人產業發展年會上,天津宜科自動化股份有限公司(以下簡稱宜科)憑借卓越的實力與突出的表現,斬獲“2023-2024雙年度移動機器人行業優質供應鏈”殊榮。這一榮譽,既是對宜科在移動機器人行業供應鏈領域所付出努力
思嵐科技榮獲雙年度移動機器人優質供應鏈獎
由移動機器人(AGV/AMR)產業聯盟、人形機器人場景應用聯盟主辦的“2024中國移動機器人(AGV/AMR)產業發展年會”于12月13日在江蘇蘇州圓滿落幕!
移動機器人的技術突破和未來展望
移動機器人已經成為現代社會不可或缺的一部分,在各個領域發揮著越來越重要的作用。在這個過程中,富唯智能機器人以其卓越的技術突破,引領著移動機器人領域的發展潮流。

智能移動機器人系統方案指南
至 48 V 之間。根據所采用的技術和預期用途,此類機器人系統可以與人類進行不同程度的交互,比如在人員周圍安全運作,與人員進行高效的合作和協同工作。為幫助工程師更好地解決設計難題,智

新松移動機器人批量進軍歐洲新能源市場
近日,新松智慧園內呈現出一派繁忙的景象。百余臺移動機器人整齊地排列在車間內,它們蓄勢待發,即將踏上前往歐洲的旅程。這批機器人代表著新松移動機器人大規模進軍歐洲本土新能源市場的重要里程碑。
智能移動機器人
富唯智能移動機器人分為復合機器人和轉運機器人,搭載ICD核心控制器,實現一體化控制,最快可實現15分鐘現場機器人的快速部署,無縫對接產線,配合自研2D/3D視覺系統,精準抓取搬運工件。

如何借助恩智浦MCX系列MCU糾錯功能,打造可靠安全的移動機器人?
安全挑戰。MCX MCU基于高性能Arm Cortex-M33內核,具有先進的錯誤檢測和糾正功能,非常適合開發開發對可靠性和安全性要求極高的移動機器人。? 移動機器人常見的可靠性和安全問題 移動機器人搭載的電子系統允許

智能移動機器人系統的用途和市場趨勢
至 48 V 之間。根據所采用的技術和預期用途,此類機器人系統可以與人類進行不同程度的交互,比如在人員周圍安全運作,與人員進行高效的合作和協同工作。為幫助工程師更好地解決設計難題,智





 工商網監
工商網監
評論