") RT-Thread編程高階用法-函數(shù)擴(kuò)展之$Sub$$與$Super$$
RT-Thread編程高階用法-函數(shù)擴(kuò)展之$Sub$$與$Super$$
前面移植了RT-Thread Nano,其實(shí)準(zhǔn)確來(lái)說(shuō)那不叫移植,那叫做部署,因?yàn)橐浦驳墓ぷ鞴俜揭呀?jīng)幫我們做好了。
1、引發(fā)思考-相關(guān)資料檢索
在之前的文章提到過(guò),RT-Thread已經(jīng)提前在main函數(shù)以前就把跟硬件配置、系統(tǒng)初始化、啟動(dòng)調(diào)度器等相關(guān)的都做好了,所以我們后來(lái)看到的main函數(shù)非常簡(jiǎn)潔,真是讓人感覺(jué)神清氣爽,有繼續(xù)往下寫(xiě)代碼的欲望,如下:
main.c
int main(void) { while(1) { rt_kprintf("Hello RTT_NANO "); HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin); rt_thread_mdelay(500); } }
那具體RT-Thread又是如何實(shí)現(xiàn)在main函數(shù)執(zhí)行之前就把所有初始化硬件、時(shí)鐘的工作都做了呢?跟隨官方文檔的RT-Thread代碼啟動(dòng)流程:

跟代碼,最后發(fā)現(xiàn)如下代碼:
/* re-define main function */ int $Sub$$main(void) { rtthread_startup(); return 0; } /* the system main thread */ void main_thread_entry(void *parameter) { extern int main(void); extern int $Super$$main(void); /* RT-Thread components initialization */ rt_components_init(); /* invoke system main function */ #if defined(__CC_ARM) || defined(__CLANG_ARM) $Super$$main(); /* for ARMCC. */ #elif defined(__ICCARM__) || defined(__GNUC__) main(); #endif }
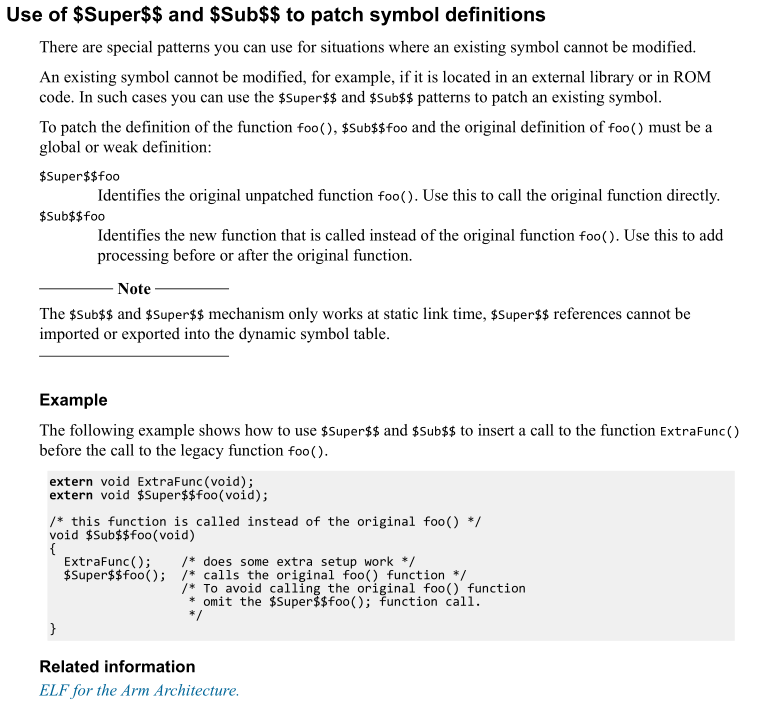
平時(shí)工作開(kāi)發(fā)中沒(méi)用到這樣的語(yǔ)法,于是只能搜索文檔來(lái)看看到底是如何實(shí)現(xiàn)的,果然在Keil幫助手冊(cè)中找到了答案:

從文檔中得知,Keil MDK編譯器用$Sub$$和$Super$$這兩個(gè)符號(hào)來(lái)擴(kuò)展了 main 函數(shù),這使得使用$Sub$$main可以在main函數(shù)執(zhí)行之前就預(yù)先執(zhí)行$Sub$$main函數(shù),所以在$Sub$$main函數(shù)里就可以完成一些基本的硬件、時(shí)鐘初始化功能,做完這些工作以后,還是得跳轉(zhuǎn)到main函數(shù)去執(zhí)行往后邏輯的呀,這就需要通過(guò)調(diào)用$Super$$main來(lái)實(shí)現(xiàn)了。(注:在Keil MDK編譯器中是這樣的情況,但在IAR以及GCC環(huán)境下有差別,這里不做分析,等后面用到再說(shuō))。
既然main函數(shù)之前能這么用,是不是換個(gè)函數(shù)也能這么用呢?這引發(fā)我的好奇,于是繼續(xù)查找文檔,在armlink_user_guide手冊(cè)中找到:
接下來(lái)開(kāi)始做實(shí)驗(yàn),然后我用stm32cubeMX生成一個(gè)基本裸機(jī)工程,下載到小熊派上來(lái)驗(yàn)證是否正確。
2、小熊派上進(jìn)行實(shí)踐
2.1 基本功能配置
配置外部時(shí)鐘、調(diào)試串口、調(diào)試接口以及LED

最后生成代碼。
2.2 編寫(xiě)代碼進(jìn)行驗(yàn)證
首先添加一個(gè)串口重定向函數(shù),后面才能使用printf
int fputc(int ch,FILE *file) { return HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,1000); }
接下來(lái)結(jié)合文檔模仿RT-Thread寫(xiě)出以下函數(shù):
void $Sub$$main(void) { extern int main(void); extern int $Super$$main(void); //初始化HAL HAL_Init(); //初始化系統(tǒng)時(shí)鐘 SystemClock_Config(); //初始化GPIO MX_GPIO_Init(); //初始化串口 MX_USART1_UART_Init(); printf("初始化已完成 "); //點(diǎn)燈 HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET); //回到真正的main函數(shù)里 $Super$$main(); }
main函數(shù)如下:
int main(void) { //延時(shí)2s HAL_Delay(2000); printf("回到main函數(shù)中 "); while(1) { HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); HAL_Delay(500); } }
將程序編譯后下載到小熊派開(kāi)發(fā)板中,然后打開(kāi)串口調(diào)試助手可以看到:
由此可見(jiàn),這是一個(gè)很有逼格的技能,以后可以在支持這種擴(kuò)展符號(hào)的編譯器下將這種技能應(yīng)用起來(lái),從而簡(jiǎn)化代碼,接下來(lái)我們?cè)偻厦孢@個(gè)程序里添加功能:添加Function函數(shù)和在它之前運(yùn)行的$Sub$$Function,然后在main函數(shù)里調(diào)用Function函數(shù):
void $Sub$$Function(void) { extern void Function(void); extern void $Super$$Function(void); printf("在Function函數(shù)之前調(diào)用$Sub$$Function "); $Super$$Function(); } void Function(void) { printf("執(zhí)行Function函數(shù) "); } int main(void) { //延時(shí)2s HAL_Delay(2000); printf("回到main函數(shù)中 "); //調(diào)用Function函數(shù) Function(); while(1) { HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); HAL_Delay(500); } }
然后編譯后將程序下載到小熊派開(kāi)發(fā)板后,通過(guò)串口調(diào)試助手看到:

至此,我們已經(jīng)完全弄明白R(shí)T-Thread是如何實(shí)現(xiàn)在main函數(shù)執(zhí)行之前就把初始化硬件、系統(tǒng)初始化、啟動(dòng)調(diào)度器等工作都完成了的基本原理。
-
函數(shù)
+關(guān)注
關(guān)注
3文章
4374瀏覽量
64400 -
編譯器
+關(guān)注
關(guān)注
1文章
1657瀏覽量
49975 -
RT-Thread
+關(guān)注
關(guān)注
32文章
1376瀏覽量
41609
原文標(biāo)題:RT-Thread編程高階用法-函數(shù)擴(kuò)展之$Sub$$與$Super$$
文章出處:【微信號(hào):RTThread,微信公眾號(hào):RTThread物聯(lián)網(wǎng)操作系統(tǒng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
2025 RT-Thread全球技術(shù)大會(huì)議程正式發(fā)布!

【直播預(yù)告】《實(shí)時(shí)操作系統(tǒng)應(yīng)用技術(shù)—基于RT-Thread與ARM的編程實(shí)踐》教學(xué)脈絡(luò)及資源簡(jiǎn)介
RT-Thread審核團(tuán)招募: 深度參與開(kāi)源RTOS社區(qū)治理與演進(jìn)
如何將RT-Thread移植到NXP MCUXPressoIDE上

從開(kāi)源中來(lái)到開(kāi)源中去-RT-Thread北京社區(qū)篇
【S32K146 RT-Thread】之 使用SFUD組件驅(qū)動(dòng)spi flash
RT-Thread上CAN實(shí)踐
【S32K146 RT-thread】之 SPI驅(qū)動(dòng)適配
開(kāi)源共生 商業(yè)共贏 | RT-Thread 2024開(kāi)發(fā)者大會(huì)報(bào)名啟動(dòng)!
【成都】9月21日RT-Thread巡回線(xiàn)下培訓(xùn)-OpenMV機(jī)器視覺(jué)
【大連】9月7日RT-Thread巡回線(xiàn)下培訓(xùn)-OpenMV機(jī)器視覺(jué)
2024 RT-Thread全球巡回 線(xiàn)下培訓(xùn)火熱來(lái)襲!
【好書(shū)推薦】RT-Thread設(shè)備驅(qū)動(dòng)開(kāi)發(fā)指南
玩轉(zhuǎn)RT-Thread之消息隊(duì)列的應(yīng)用

RT-Thread 新里程碑達(dá)成——GitHub Star 破萬(wàn)!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論