") 基于深度的關(guān)鍵點匹配算法實現(xiàn)單步多人絕對三維姿態(tài)
基于深度的關(guān)鍵點匹配算法實現(xiàn)單步多人絕對三維姿態(tài)

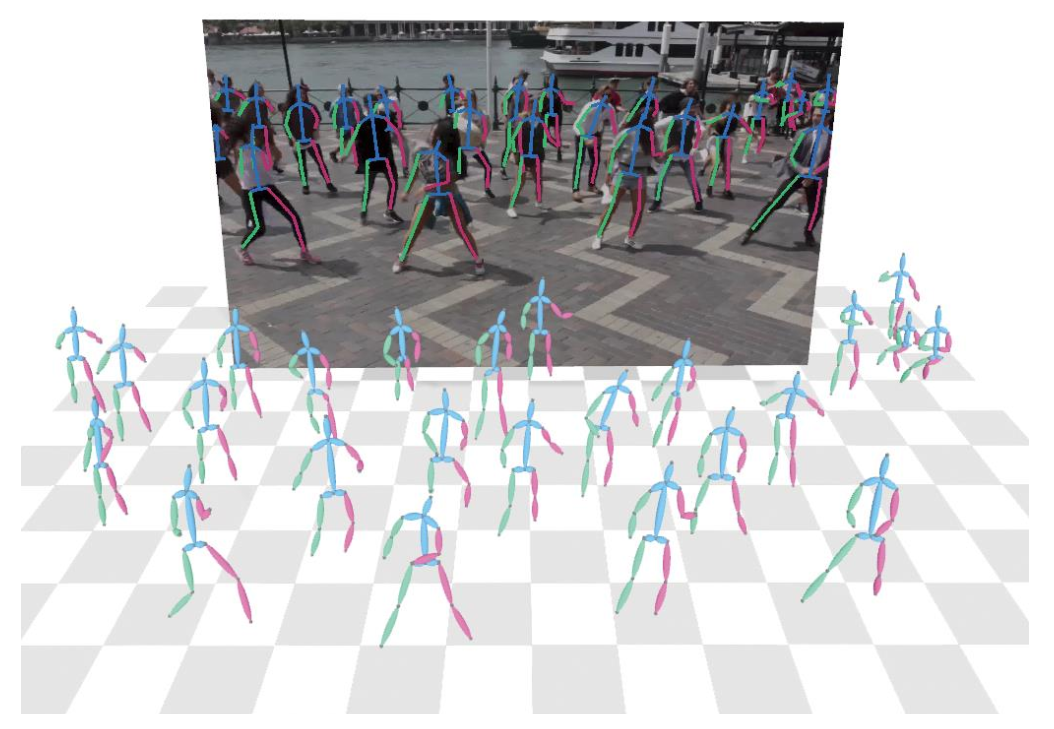
由單幀彩色圖像恢復(fù)多人的三維姿態(tài)和人與相機(jī)的絕對位置關(guān)系是一個具有挑戰(zhàn)性的任務(wù),因為圖像在拍攝過程中損失了深度和尺度信息。在 ECCV2020 上,商湯與浙大聯(lián)合實驗室提出了單步多人絕對三維姿態(tài)估計網(wǎng)絡(luò)和 2.5D 人體姿態(tài)表示方法,并且基于所提出的深度已知的關(guān)鍵點匹配算法,得到絕對三維人體姿態(tài)。該方法結(jié)合圖像的全局特征和局部特征,能獲得準(zhǔn)確的人體前后關(guān)系和人與相機(jī)的距離,在 CMU Panoptic 和 MuPoTS-3D 多人三維人體姿態(tài)估計數(shù)據(jù)集上均達(dá)到 SOTA(state-of-the-art),并且在未見過的場景中具有很好的泛化能力。
論文名稱:SMAP: Single-Shot Multi-PersonAbsolute 3D Pose Estimation
動機(jī)
基于單幀圖像的人體絕對三維姿態(tài)估計在混合現(xiàn)實、視頻分析、人機(jī)交互等領(lǐng)域有很廣泛的應(yīng)用。近幾年研究人員多將注意力集中于人體相對三維姿態(tài)估計任務(wù)上,并且取得了不錯的成果。但是對于多人場景下人體絕對三維姿態(tài)估計任務(wù),除了要估計相對人體三維姿態(tài),更重要的是估計人與相機(jī)的絕對位置關(guān)系。
當(dāng)前大多數(shù)方法對檢測到的人體區(qū)域進(jìn)行裁剪后,分別估計絕對位置。有的方法利用檢測框的大小作為人體尺寸的先驗,通過網(wǎng)絡(luò)回歸深度信息,但是這樣的方法忽略了圖像的全局信息;另外一些方法基于一些假設(shè),通過后處理的手段估計人體深度,如地面約束,但是這樣的方法依賴于姿態(tài)估計的準(zhǔn)確度,而且很多假設(shè)在實際場景中無法滿足(比如人腳不可見)。
我們認(rèn)為要準(zhǔn)確地估計人的絕對三維位置需要利用圖像中所有與深度相關(guān)的信息,比如人體尺寸、前后遮擋關(guān)系、人在場景中的位置等。近年來有很多工作利用卷積神經(jīng)網(wǎng)絡(luò)回歸場景的深度信息,這啟發(fā)我們使用網(wǎng)絡(luò)直接估計場景中所有人的深度信息,而不是在后處理過程中恢復(fù)深度。
綜上,我們提出了新的單步自底向上的方法估計多人場景的人體絕對三維姿態(tài),它可以在一次網(wǎng)絡(luò)推理后得到所有人的絕對位置信息和三維姿態(tài)信息。另外,我們還提出了基于深度信息的人體關(guān)鍵點匹配算法,包括深度優(yōu)先匹配和自適應(yīng)骨長約束,進(jìn)一步優(yōu)化關(guān)鍵點的匹配結(jié)果。
方法介紹
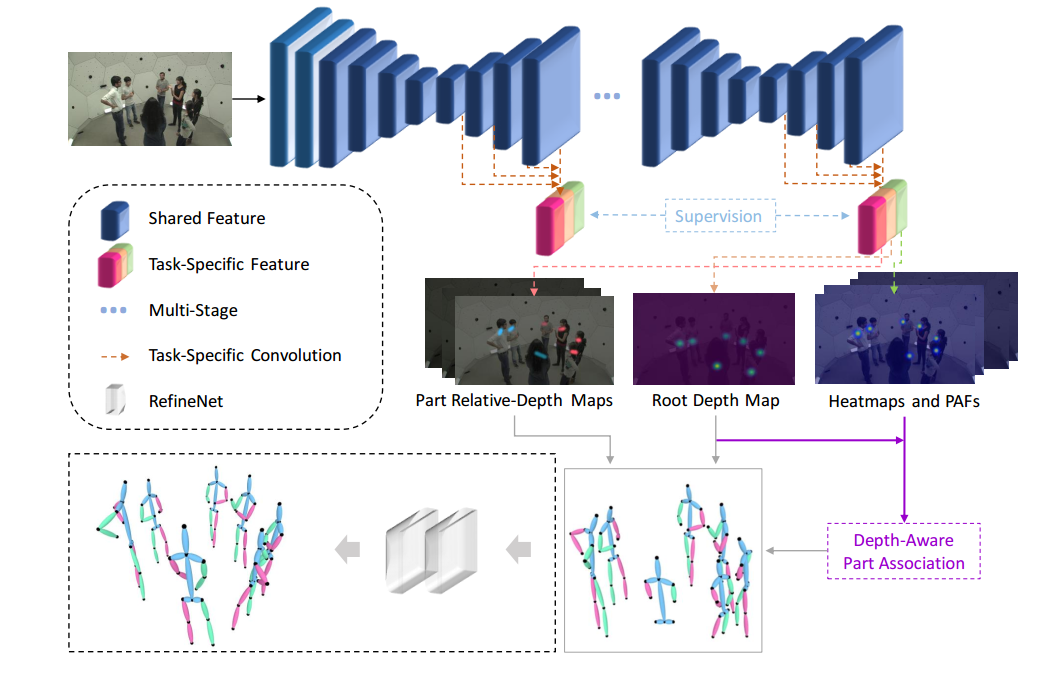
上圖展示了所提出方法的流程,包括 SMAP 網(wǎng)絡(luò),基于深度的關(guān)鍵點匹配(Depth-Aware Part Association), 和可選的微型優(yōu)化網(wǎng)絡(luò)(RefineNet)。輸入一張彩色圖像,SMAP 網(wǎng)絡(luò)同時輸出人體根節(jié)點深度圖(Root Depth Map)、二維關(guān)鍵點熱度圖(Heatmaps)、關(guān)鍵點連接向量場(PAFs)和骨骼相對深度圖(Part Relative-Depth Maps)。基于以上的 2.5D 特征表示方法,進(jìn)行關(guān)鍵點匹配,然后利用相機(jī)模型得到人體絕對三維關(guān)鍵點坐標(biāo)。最后,可以使用微型優(yōu)化網(wǎng)絡(luò)對結(jié)果進(jìn)行補全和優(yōu)化。
2.12.5D特征表示方式
2.1.1人體根節(jié)點深度圖(RootDepthMap)
由于圖像中人體數(shù)目是未知的,我們提出了人體根節(jié)點深度圖來表示場景中人的絕對深度,根節(jié)點深度圖中,每個人根節(jié)點(如脖子或腰部)位置的值表示其根節(jié)點的絕對深度,在訓(xùn)練時,只對根節(jié)點位置進(jìn)行監(jiān)督。其優(yōu)勢在于,不受圖中人數(shù)限制,并且只需要三維人體姿態(tài)數(shù)據(jù)便可以訓(xùn)練,而不需要整張圖的深度信息。
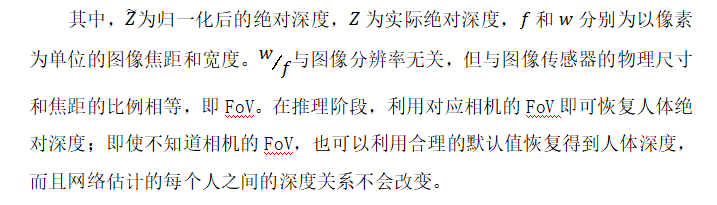
對于同一個深度下的同一個人,具有不同內(nèi)參(FoV, field of view)的相機(jī)會得到不同的二維圖像,這對建立二維信息(如人體尺寸)和絕對深度之間的映射關(guān)系是不利的,所以需要對輸入網(wǎng)絡(luò)的深度利用 FoV 進(jìn)行歸一化:
2.1.2Heatmaps和 PAFs
對于二維信息,我們采用與 OpenPose 相同的表示方式。關(guān)鍵點熱度圖(Heatmaps)表示關(guān)鍵點位于某個像素的概率,關(guān)鍵點連接向量場(PAFs)表示關(guān)鍵點之間相連的方向和概率。
2.1.3骨骼相對深度圖(PartRelative-DepthMaps)
骨骼相對深度圖生成方式與 PAFs 相同,區(qū)別在于它的值表示的是關(guān)鍵點之間的深度差。
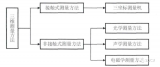
2.2基于深度的關(guān)鍵點匹配算法
由關(guān)鍵點熱度圖(Heatmap)得到人體根節(jié)點位置后,便可以從根節(jié)點深度圖(Root DepthMap)中讀取每個人的深度信息,我們利用深度信息進(jìn)一步優(yōu)化人體關(guān)鍵點匹配算法,以解決二維關(guān)鍵點匹配算法中存在的歧義性問題。
如圖第一行所示,我們提出深度優(yōu)先匹配,當(dāng)兩個人存在遮擋時,如果同一個關(guān)鍵點有所重疊,單純基于二維信息的匹配方式無法確定該關(guān)鍵點的所屬關(guān)系,有可能導(dǎo)致大部分關(guān)鍵點的錯連,如第三列所示。而重疊的關(guān)鍵點在絕大多數(shù)場景中應(yīng)該屬于前一個人,所以基于網(wǎng)絡(luò)推斷的深度信息,我們給予靠近相機(jī)的人更大的連接優(yōu)先級,如第四列所示。 另外,我們還提出了自適應(yīng)骨長距離約束。在二維匹配算法中,一般設(shè)置圖像寬度的一半為關(guān)鍵點匹配的距離約束,但是由于人與相機(jī)距離不同,在二維圖像中呈現(xiàn)的尺寸不同,固定的約束無法起到很好的效果,如圖中第二行第三列所示。對于每個骨骼,我們使用訓(xùn)練集中該骨骼的平均長度作為其實際長度,然后利用網(wǎng)絡(luò)輸出的深度計算其在二維圖像中的最大長度如下:

2.3絕對三維姿態(tài)恢復(fù)
由基于深度的匹配算法獲得人體關(guān)鍵點匹配結(jié)果后,可以由根節(jié)點絕對深度和骨骼相對深度得到每一個關(guān)鍵點的絕對深度,然后利用如下公式

反投影得到人體關(guān)鍵點絕對三維坐標(biāo)。其中 K 是相機(jī)內(nèi)參矩陣,在絕大部分應(yīng)用中都是已知的,如果未知,可以使用估計值。
由上述步驟恢復(fù)的結(jié)果可能會引入兩種誤差:由于骨架是以級聯(lián)的方式表示的,在恢復(fù)末端關(guān)節(jié)點深度時,會有累計誤差;另外,嚴(yán)重的遮擋和圖像截斷會導(dǎo)致人體某些關(guān)鍵點的缺失。對此,我們提出了微型補全網(wǎng)絡(luò) RefineNet,輸入估計的相對二維和三維關(guān)鍵點坐標(biāo),輸出優(yōu)化和補全后的相對三維關(guān)鍵點坐標(biāo)。RefinNet 并不會對人體根節(jié)點絕對深度進(jìn)行優(yōu)化。
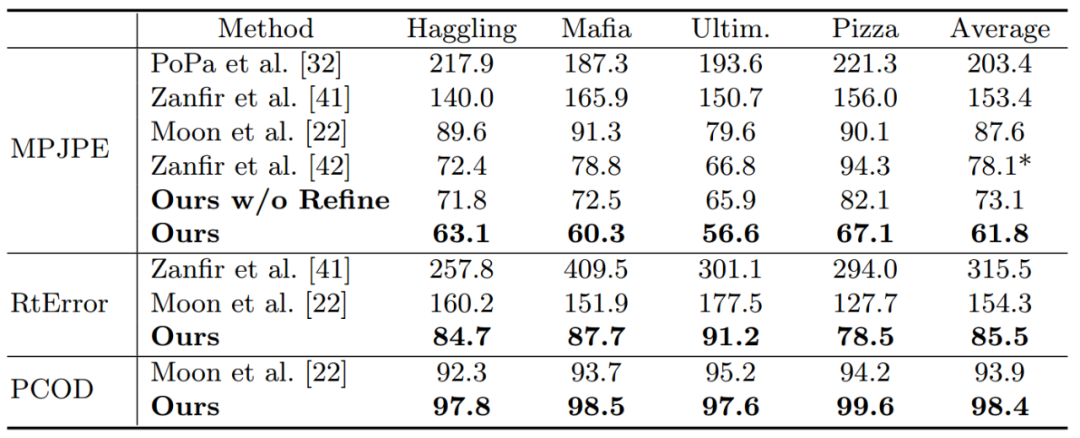
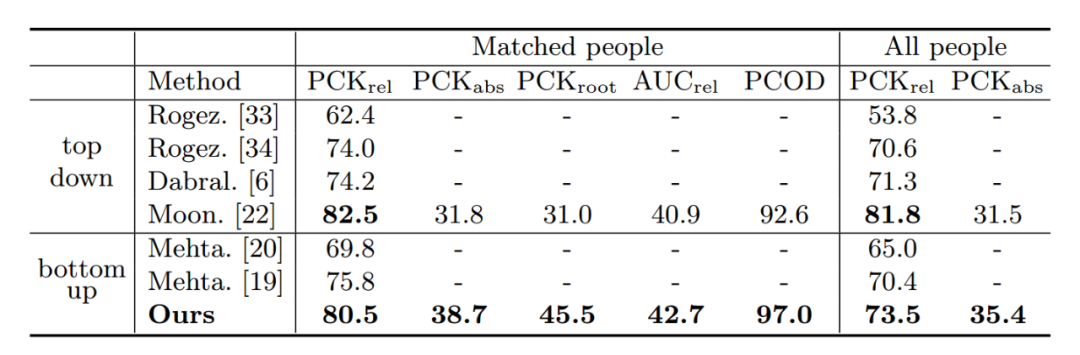
實驗結(jié)果 我們提出的方法在 CMU Panoptic 和 MuPoTS-3D 多人三維人體姿態(tài)估計數(shù)據(jù)集上均達(dá)到 SOTA。
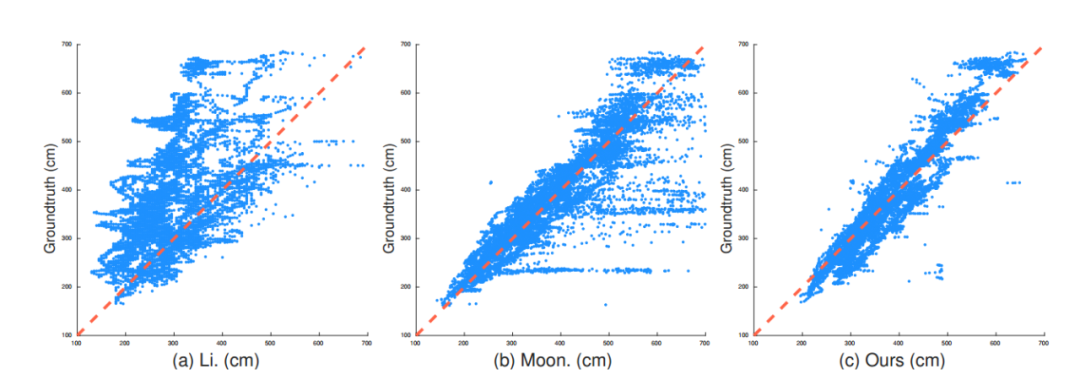
另外,我們對不同可選的深度估計方法進(jìn)行了對比。第一種,回歸全圖的深度[1],如圖第一列;第二種,根據(jù)檢測框的尺寸回歸人體深度[2],如圖第二列。散點圖的橫坐標(biāo)為人體深度估計值,縱坐標(biāo)為實際值,散點越靠近 x=y 直線說明回歸的深度越準(zhǔn)確。可以看出,我們提出的方法(Root Depth Map)具有更好的深度一致性和泛化能力。
為了體現(xiàn)單步自底向上網(wǎng)絡(luò)相對于自頂向下網(wǎng)絡(luò)[2]的優(yōu)勢,我們進(jìn)行了定性分析。圖中左邊為自頂向下網(wǎng)絡(luò)的結(jié)果,可見自頂向下的方法會受到姿態(tài)變化、人體遮擋、人體截斷的影響,而我們提出的自底向上的方法可以利用全局信息緩解這個問題。
-
三維
+關(guān)注
關(guān)注
1文章
518瀏覽量
29447 -
匹配算法
+關(guān)注
關(guān)注
0文章
24瀏覽量
9452 -
SMAP
+關(guān)注
關(guān)注
0文章
4瀏覽量
8912
原文標(biāo)題:ECCV2020 | SMAP: 單步多人絕對三維姿態(tài)估計
文章出處:【微信號:tyutcsplab,微信公眾號:智能感知與物聯(lián)網(wǎng)技術(shù)研究所】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
基于深度學(xué)習(xí)的三維點云配準(zhǔn)方法
起點,經(jīng)過點,終點,三點xyz,畫三維圓弧。
基于OpenGL 的汽車轉(zhuǎn)向三維模型設(shè)計
三維快速建模技術(shù)與三維掃描建模的應(yīng)用
視頻運動捕獲系統(tǒng)中多標(biāo)記點的三維跟蹤算法
三維模型的空間匹配與拼接

利用并查集的多視匹配點提取算法

彩色分割立體匹配的三維目標(biāo)快速重建
計算機(jī)視覺:三維點云數(shù)據(jù)處理學(xué)習(xí)內(nèi)容總結(jié)
圖像匹配應(yīng)用及方法
基于深度學(xué)習(xí)的三維點云語義分割研究分析
什么樣的點可以稱為三維點云中的關(guān)鍵點呢?
總結(jié)!三維點云基礎(chǔ)知識





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論