 機器人路線圖:從互聯網到機器人
機器人路線圖:從互聯網到機器人

2020年9月美國計算機社區聯盟(CCC)發布第四版《機器人路線圖:從互聯網到機器人》(以下簡稱“路線圖”),探討了機器人在未來5年、10年和15年作為關鍵經濟促進者的使能作用,尤其是在制造、醫療和服務行業。本版路線圖基于對第三版路線圖進展的審查和評估進行了更新,總結了既定的主要社會機遇、待解決的相關挑戰以及需要采取的措施,包括技術創新及其采用和政策措施兩方面,以確保美國在機器人技術領域的持續領先地位。
在美國計算機社區聯盟(CCC)的支持下,2009年工業界和學術界聯合制定了首份《機器人路線圖:從互聯網到機器人》,促成了美國國家機器人計劃(NRI)的設立。2013、2016年在美國國家科學基金會(NSF)和CCC的支持下,路線圖進行了修訂。新版路線圖總結了制造業、生活質量、物流、農業、醫療、安全、運輸等七個領域的社會驅動力,提出了成本、高混合度、安全性、易用性、響應時間、魯棒性等六個方面的挑戰,最終將挑戰映射到架構與設計實現、移動性、抓取和操作、感知、規劃和控制、學習和適應、人機交互、多機器人協作等八個機器人研究領域,突出了在新材料、集成傳感、規劃/控制方法等方面的新研究內容以及多機器人協作、魯棒計算機視覺識別、建模和系統級優化方面的新研發內容。
一、機器人的架構和設計實現
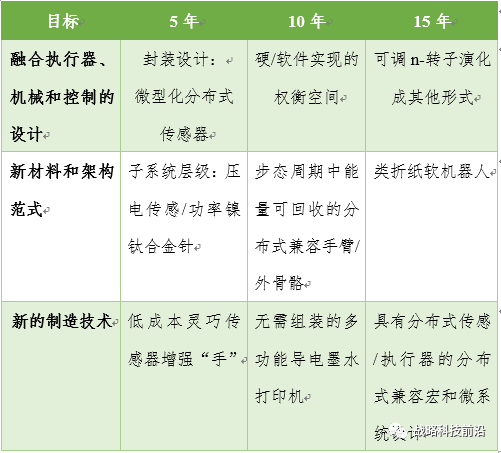
機器人技術逐步從傳統帶有離散感知/驅動關節和集成控制器的低自由度的剛性連桿架構邁向具有分布式/集成式多模態傳感/驅動的可變拓撲重構高自由度系統。機器人在現實環境中成功應用的核心要求包括:半自主操作、對環境的持續適應、數據驅動的學習和控制以及能效和零停機,具體研究方向包括:(1)重構網絡-物理系統架構;(2)解決分布式異步復雜系統中模/數轉換數字接口設計挑戰;(3)實時機器人數字信息架構;(4)集成傳感/執行、機械和控制的多功能模塊;(5)新材料范式:柔性材料;(6)新的制造技術:增材制造。
表1 未來5-15年的技術發展目標
二、機器人的移動性
腿是機器人在許多環境中最有效的移動解決方案,目前有四足機器人和兩足機器人,后者對人類來說有更廣泛的適應和協作空間。足式機器人技術的研發可以衍生出康復機器人和外骨骼等副產品,同時其物理驅動機制具有一定的普適性。足式機器人在移動操作平臺方面仍處于起步階段,且需要配備更輕、更小、更低能耗的感知和計算包。
未來5-15年的技術發展目標:
(1)未來5年目標:足式機器人可實現3英尺降落后正常運作,水平運作可達到0.8m每秒的行進速度,在平整地面環境可續航5h以上。它具有實時感知、映射和推理能力以實現自主導航。
(2)未來10年目標:足式機器人可實現滾落后正常運作。給定一個近似的環境地圖,它可以自主且強健地合成和執行給定的移動和操作任務,如搬運碎片以搜尋幸存者。
(3)未來15年目標:人形機器人可以在完全非結構化、動態環境中自主且強健地運作。
三、機器人的抓取和操作
一些研究團隊和公司正在探索機器人抓取的新方法,抓取不熟悉對象的方法目前可分為3D模型、硬件設計、演示學習、強化學習四類。機器人抓取的新方法是基于物理或模擬數據的訓練學習,未來5-15年的技術發展目標如下:
(1)未來5年目標:生產出廉價的機器人夾持器能夠從雜物箱中抓取新奇的剛體,其可靠性接近人類,并將應用于電子商務和制造業中。
(2)未來10年目標:生產出廉價的機器人夾持器能夠從雜物箱中抓取大量剛體和柔體,其可靠性超過人類,能夠精準定位并從箱子中提取特定的目標物體。
(3)未來15年目標:生產出各式各樣的機器人夾持器,可靠地從雜物箱中抓取任何剛體或柔體,但不包括形狀極端不稱的物體,如蘋果耳機。
機器人操作方面的發展方向是完全沉浸式、具有觸覺的臨場感以及多模態傳感器反饋,未來5-15年的技術發展目標如下:
(1)未來5年目標:研制出帶有觸覺傳感器陣列的簡單機器人手,能夠執行抓握調整或簡單物體再抓握。
(2)未來10年目標:研制出帶有觸覺傳感器陣列的中度復雜的機器人手,能夠執行動態抓握調整和再抓握。
(3)未來15年目標:研制出帶有觸覺傳感器陣列的高度復雜的機器人手,其密度和靈敏度接近人類,能夠高速全手抓取新奇物體并精細控制;其技能和可靠性接近人類,可以執行靈巧的操作任務。
四、機器人的感知
計算機視覺技術發展迅速,觸覺技術也有一定的進展,其它感知技術進展有限。機器人技術在可靠性和速度方面對計算機視覺提出獨有的挑戰,需要推進的關鍵技術包括:(1)從觀察視頻活動推進到主動執行類似任務;(2)主動感知;(3)復雜、高維度推理;(4)開放性(Open-world Performance);(5)與其它系統的集成性;(6)系統結構,如圖像端到端強化學習與可遷移性之間的權衡。
五、機器人的規劃和控制
未來的機器人將需要更先進的控制和規劃算法,能夠處理不確定性和自由度更大的代理系統。在過去,控制和規劃被認為是兩個單獨問題,而現在控制和運動規劃越來越需要綜合處理。相關的技術方向包括:不確定環境下的任務和運動規劃,抓握規劃和操作,復雜和動態環境下的自主規劃和約束控制,高維、高動態和混合系統的控制,自主性平滑可調的規劃和控制。
六、機器人的學習和適應系統
未來機器人將面臨成千上萬種不同的任務,需要自己或在人類的幫助下學習和適應。未來5-15年的技術發展目標如下:
(1)未來5年目標:在傳統機器人平臺中引入機器人學習、持續改進機器人在相當受限的環境中執行特定任務的性能。
(2)未來10年目標:通過新材料和架構,微型/大型機器人和機器人數量來提升機器人平臺的多樣性,要求機器人學習應對日益增長的復雜性;開發大規模、實用的數據集、基準等。
(3)未來15年目標:機器人在協作環境中無縫操作。
七、多機器人系統
多機器人系統已成功應用于制造業、倉庫管理、災害監測、建筑和農業等領域,但在分布式控制與決策、分散/集中混合機制、異構機器人團隊、多機器人系統的通信和傳感等方面面臨著諸多挑戰。
未來5-15年的技術發展目標如下:
(1)未來5年目標:自動生成分布式控制算法,在分布式控制和決策方面取得重大進展,可實現多時間尺度處理,互操作處理,多維度(功能、空間和時間)處理,形成權衡移動、傳感和通信的有效模型。
(2)未來10年目標:在真實環境中有力地部署大規模機器人團隊,并且通過云架構實現團隊間相互學習和協作;實現以人為中心的商用群系統;通過動態團隊組合實現復雜任務的異構解決方案;優化傳感、移動和通信之間的功耗。
(3)未來15年目標:實現在農業、制造業、倉儲和環境監測等多個行業的商業化應用和大規模部署;通過大力部署低成本混合協作機器人團隊實現真正的“機器人物聯網(Internet-of-Robotic-Things)”生態。
八、人機交互
機器人在人機交互方面仍然面臨理解人類、多時間尺度交互、信任度、接受度等諸多問題,具體挑戰包括:交互多樣性帶來的難以客觀評估;缺乏用于人機交互研究的機器人平臺;缺乏來自交互場景的可用數據集;缺乏真實世界評估的途徑。
未來5-15年的技術發展目標如下:
(1)未來5年目標:機器人能夠可靠地確定與上下文相適應的基本行為和情感表達;機器人能夠在半受控設置下與用戶保持幾個月的互動、學習和適應;增強和交互現實系統,將允許特定場景專業人員實時利用和操作機器人數據;機器人能夠解釋它們的行為,取得人們的信任;通過大規模研究使人們在很大程度接受機器人;人機交互系統的社區試驗臺、評估指標,可以直接比較不同方法;在結構化的現實環境中進行機器人研究測試。
(2)未來10年目標:機器人可以動態地學習和更新用戶和任務模型,并在半結構化的任務和環境中處理感知、建模和適應,能夠適應環境和用戶的合理變化;可以處理對話中的突發事件,適應用戶狀態,并在半受控設置下無縫集成社會行為;在半結構化設置下工作一年,并滿足多個用戶需要;能夠模擬人們的期望和事先理解,以提供最相關的信息來促進信任;共享自主系統可以確定用戶目標,同時不斷調整和促使用戶支持這些目標并選擇適當的自主度;用戶所期望的機器人功能將會部署、應用和測試。
(3)未來15年目標:機器人利用歷史交互信息和公開數據來調整自己的行為以適應個體;人機信任達到人人信任水平;機器人越來越多地出現在日常工作場所、公共場所和家庭中,安全地履行特定的角色和任務;用于機器人接口的編程工具,支持標準、彈性目標,解決安全和隱私問題;機器人可以在半結構化的任務和環境中感知、建模和適應復雜的用戶行為、動作和意圖,并跨領域和環境遷移學習;機器人可以在不受控設置下,通過對話和社會交互策略,適應不同的用戶群體;機器人不僅能夠識別而且能夠預測意外事件、用戶錯誤、以及人類協作者不斷變化的能力,并采取行動防止或最小化其影響;共享自主系統可以集成和融合各種形式的用戶輸入,動態地為用戶目標和錯誤建模,在必要時改變與用戶溝通的自主度;在幾年的時間里,面對不同能力水平的任意數量的用戶,機器人將在不受控制的環境中維持自適應功能;基于已部署系統的長期使用和交互理解,相關準則和標準將加以完善,使機器人無縫地融入社會,在不受控設置下實現安全、有效和可接受的協同工作。
-
機器人
+關注
關注
213文章
29615瀏覽量
212189 -
互聯網
+關注
關注
55文章
11240瀏覽量
106038
原文標題:【政策規劃】美國發布最新《機器人路線圖:從互聯網到機器人》
文章出處:【微信號:gh_22c5315861b3,微信公眾號:戰略科技前沿】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
明遠智睿SSD2351開發板:語音機器人領域的變革力量
盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+數據在具身人工智能中的價值
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
從市場角度對機器人的基本解讀






 工商網監
工商網監
評論