") AGV小車自動避障解決方案
AGV小車自動避障解決方案

廣東奧迪威傳感科技股份有限公司(AUDIOWELL)是一家以“位置、距離、速度傳感器及相應(yīng)模組的研發(fā)、設(shè)計、生產(chǎn)和銷售”為主營業(yè)務(wù)的高新技術(shù)企業(yè),是細分行業(yè)領(lǐng)先的傳感器元器件及解決方案的提供商。
目前,AUDIOWELL是國內(nèi)傳感器件產(chǎn)品線領(lǐng)先的制造商和方案提供商,其超聲波傳感器、流量傳感器、發(fā)聲器件及超聲波換能器件等系列處于市場領(lǐng)先地位,產(chǎn)品廣泛應(yīng)用于汽車電子、智能儀表、安防通訊、環(huán)境與健康電器等多個行業(yè)和領(lǐng)域。在服務(wù)中國客戶的同時,AUDIOWELL已經(jīng)為全球多個國家和地區(qū)客戶提供專業(yè)的產(chǎn)品和服務(wù)。
AGV小車自動避障解決方案
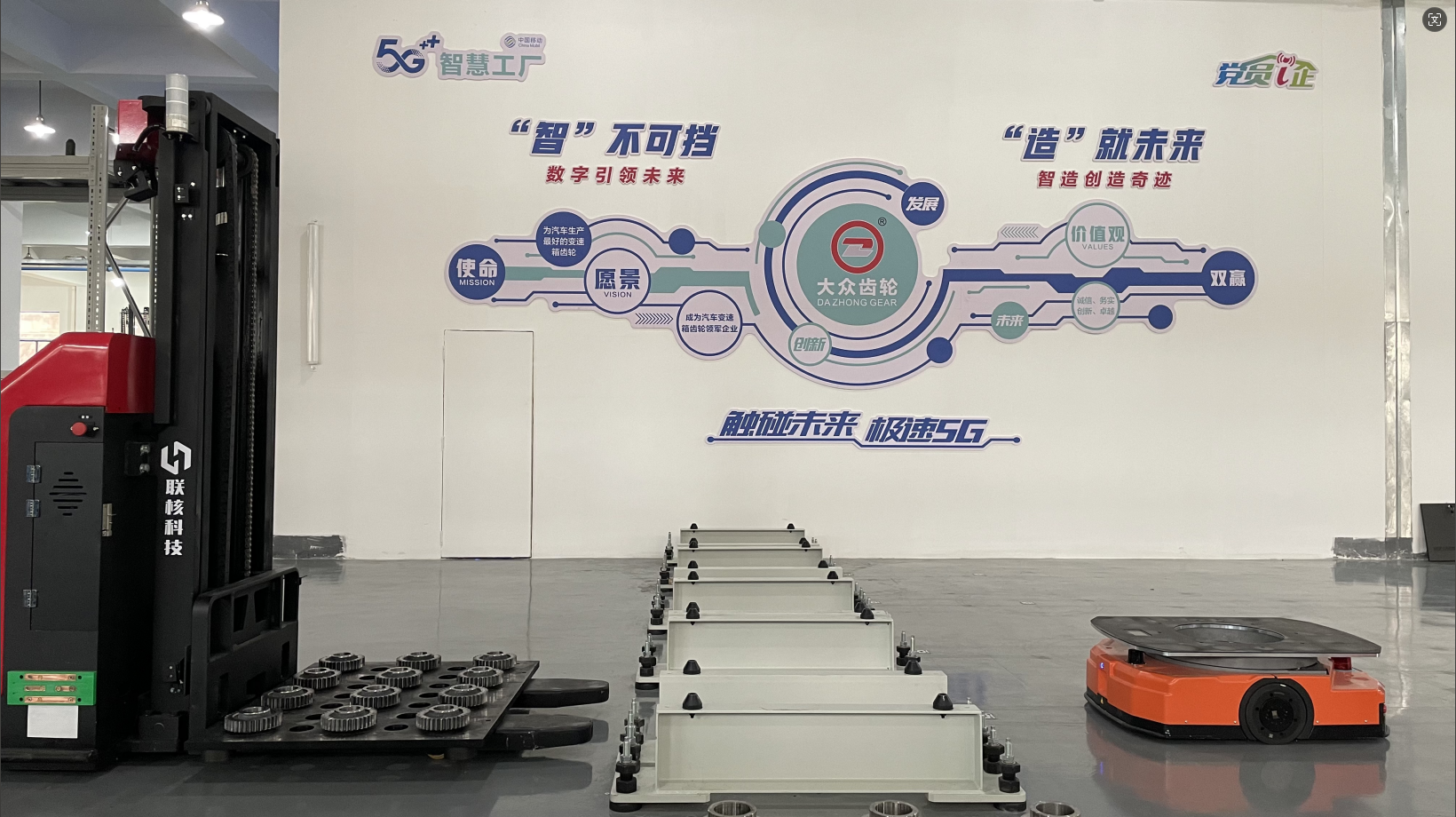
近年來,無人化這個概念逐漸被運用到了社會中的各個行業(yè),比如無人零售、無人駕駛、無人工廠;而跟物流有關(guān)的就有無人分揀機器人、無人駕駛卡車和無人叉車,越來越多的新裝備也開始投入到實際運用中。
倉儲管理在物流管理中占據(jù)著核心地位。傳統(tǒng)的倉儲管理中存在諸多的弊端,通過智慧物流,升級裝備技術(shù),提升自動化水平,實現(xiàn)機器替代人的戰(zhàn)略,可有效解決倉儲物流管理的現(xiàn)存痛點。其中自動引導運輸車(Automated Guided Vehicle,簡稱AGV)是智能化物流倉庫中必不可少的工具。
AGV小車主要實現(xiàn)定位商品位置,以最優(yōu)路徑揀貨,然后自動把貨物送到目的地的功能。不管是要進行導航規(guī)劃還是避障,感知周邊環(huán)境信息是第一步。就避障來說,移動機器人需要通過傳感器實時獲取自身周圍障礙物信息,包括尺寸、形狀和位置等信息。避障使用的傳感器多種多樣,各有不同的原理和特點。目前常見的主要有超聲波傳感器、視覺傳感器、激光傳感器、紅外傳感器等。
其中,超聲波傳感器是一種成本低、實現(xiàn)方法簡單、技術(shù)成熟的方案,其利用超聲波傳感器來實現(xiàn)避障,即通過壓電或靜電變送器產(chǎn)生一個頻率在幾十kHz的超聲波脈沖組成波包,系統(tǒng)檢測高于某閾值的反向聲波,檢測到后使用測量到的飛行時間計算距離,實時獲取自身周圍障礙物信息,包括障礙物的尺寸、形狀和位置等。
作為機器人的眼睛,AGV領(lǐng)域的避障問題,奧迪威(AUDIOWELL)推出了車規(guī)級的超聲波傳感器,以替代傳統(tǒng)的紅外和激光傳感器,能夠幫助倉儲AGV在倉庫中實現(xiàn)自主避障,當多輛小車交叉行駛時,及時、準確停車以避免碰撞。超聲波傳感器可探測90°水平視角、45°垂直視角范圍,且有效探測距離為5m,以保證更高的可靠性與穩(wěn)定性。相對于2D 掃面式雷達的單一水平面探測,傳感器可以更好地規(guī)避地上的低矮障礙物。

傳感器發(fā)射超聲波,聲音是錐形傳播的,因此實際測到的距離并不是一個點,而是某個錐形角度范圍內(nèi)最近物體的距離。超聲波傳感器內(nèi)置的避障算法,對視場范圍內(nèi)的所有障礙物信息進行深度整合與處理,最終只輸出距離機器人最近的障礙物的方位信息。
當傳感器探測到障礙物并進入到預警區(qū)域內(nèi),傳感器就會將距離機器人最近的障礙物的方位信息及時反饋給AGV控制系統(tǒng),由控制系統(tǒng)控制機器人減速、剎車。而對于那些不在機器人前進區(qū)域內(nèi)的障礙物,即使離的再近,雷達也不會預警,以保證機器人作業(yè)的效率。當障礙物離開后或者設(shè)計繞開障礙物,機器人方可繼續(xù)工作。在實際應(yīng)用中,只需要設(shè)置AGV車寬、避障范圍即可,無需二次數(shù)據(jù)開發(fā)。
車輛通過激光點云結(jié)合高精度地圖進行局部路徑規(guī)劃,獲得若干條待選軌跡。然后將超聲波獲取到的障礙物信息進行投影,反算至車輛坐標系下,對獲得的待選軌跡進行進一步篩選與修正,最終得出最優(yōu)軌跡,根據(jù)最優(yōu)軌跡控制車輛運動。當車輛處于前進狀態(tài)時,前方超聲波獲取的障礙物距離小于車輛行駛的安全距離時,車輛進行急停,當車輛處于倒車狀態(tài)時同理。
-
AGV
+關(guān)注
關(guān)注
27文章
1436瀏覽量
42231 -
AGV小車
+關(guān)注
關(guān)注
4文章
178瀏覽量
11499
原文標題:奧迪威(AUDIOWELL)超聲波傳感器
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
AGV機器人如何實現(xiàn)毫秒級避障?深度解析多傳感器融合的核心技術(shù)

一種基于分數(shù)階 PID 直流電機調(diào)速的 AGV 控制系統(tǒng)
AGV自動搬運小車基于物聯(lián)網(wǎng)的數(shù)據(jù)采集解決方案

這么全的AGV小車有配件 趕快收藏

10W預算,不買傳統(tǒng)搬運設(shè)備買AGV小車,值嗎?
如何選擇讓自己滿意(適合)的agv小車?純干貨分享
IO模塊:AGV小車自動化控制的得力助手

Agv小車能對接哪些自動化設(shè)備?最后一個你絕對想不到
智能呼叫、激光導航、自動避障,為什么AGV機器人被需要?

Agv小車有哪些車型?特點和優(yōu)勢是什么?適用哪些場景?

AGV讀卡器在AGV自動搬運小車上應(yīng)用方案

什么是AGV小車?有什么功能?適用于哪些場景?
工控機在AGV小車中的關(guān)鍵應(yīng)用,適用于AGV小車的研華工控機

第七章-V1.5 STM32超聲波測距STM32F103C8t6超聲波避障小車 超聲波避障模塊 STM32超聲波測距






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論