") MEMS激光雷達振鏡技術(shù)指標及選型
MEMS激光雷達振鏡技術(shù)指標及選型

一、激光雷達簡介
早在1960年激光雷達概念就已提出,近些年來激光雷達才進入迅速發(fā)展時期,學術(shù)界和產(chǎn)業(yè)界一致認為激光雷達是無人駕駛(包括自動駕駛車輛,AGV,UAV等)不可或缺的探測和傳感部件。激光雷達可用于物體探測與規(guī)避,物體識別與跟蹤,即時定位與地圖構(gòu)建等。隨著無人駕駛的快速發(fā)展,對于激光雷達的需求日益增長。
調(diào)制激光可以用于距離探測和測量,但傳統(tǒng)的激光測距儀(laser rangefinder)僅能測量瞬時視場范圍內(nèi)的距離。為了形成更大視場范圍內(nèi)的3D形貌識別與模型構(gòu)建,必須在既定的視場范圍內(nèi)實現(xiàn)激光光束的偏轉(zhuǎn)和全局掃描。
二、MEMS激光雷達簡介
MEMS,微機電系統(tǒng),尺寸在毫米級或者更小的傳感器、執(zhí)行器或者微型系統(tǒng)。常見產(chǎn)品包括MEMS加速度計、MEMS麥克風、陀螺儀、微馬達、微泵、MEMS振鏡及其集成產(chǎn)品。
MEMS振鏡(MEMS mirror)屬于一種光學MEMS執(zhí)行器芯片,可以在驅(qū)動作用下對激光光束進行偏轉(zhuǎn)、調(diào)制、開啟閉合及相位控制。目前廣泛應(yīng)用于投影、顯示、光通信等場景中。
MEMS LiDAR,采用MEMS振鏡作為激光光束掃描元件,具有體積小、宏觀結(jié)構(gòu)簡單、可靠性高、功耗低等優(yōu)勢,是目前激光雷達實現(xiàn)落地應(yīng)用的最合適的技術(shù)路徑。
三、MEMS振鏡及其選型參數(shù)
1. MEMS激光雷達振鏡技術(shù)指標及選型
單軸和雙軸MEMS振鏡均可根據(jù)工作模式劃分為諧振狀態(tài)、非諧振狀態(tài)和半諧振狀態(tài)。
按照 MEMS振鏡的驅(qū)動方式不同,可劃分為靜電驅(qū)動(ES),電磁驅(qū)動(EM),電熱驅(qū)動(ET)以及壓電驅(qū)動(PE)四種。
業(yè)內(nèi)部分知名學者對于激光雷達的MEMS振鏡選型及參考指標做了指引性的討論,具體如下:
(1)FoV視場角
激光雷達的掃描角度,包括水平和豎直方向,對于自動駕駛激光雷達,更大的掃描角度意味著更大的視場角。
(2)Optical Aperture光學孔徑:
MEMS振鏡的光學特性與激光雷達的空間分辨率、探測距離等參數(shù)息息相關(guān)。
其中空間分辨率與激光波長、激光光束質(zhì)量正相關(guān),與激光光斑大小負相關(guān),市場期望激光雷達的角分辨率盡可能小于1mrad,因此有著較好的激光光束質(zhì)量時,MEMS振鏡的直徑應(yīng)不小于1mm。 探測距離則與發(fā)射激光功率、透射效率、障礙物發(fā)射率、接收端半徑等參數(shù)相關(guān)。(3)Scanning speed and Frequency掃描速度及諧振頻率:對于自動駕駛應(yīng)用的雙軸MEMS激光雷達,MEMS振鏡的橫軸(水平方向,快軸)掃描頻率應(yīng)在0.5-2KHz之間,縱軸(垂直方向,慢軸)掃描頻率應(yīng)在10-30Hz之間。 此外,若選用的MEMS振鏡的諧振頻率較高,激光雷達的分辨率、幀率及魯棒性均更佳。(4)Mirror Size and Weight振鏡尺寸及重量
MEMS激光雷達得到產(chǎn)業(yè)界青睞的原因之一便是體積小、便于集成。因此在滿足OpticalAperture和諧振頻率的前提下,MEMS的尺寸應(yīng)盡可能優(yōu)化。
(5)FoM (Figure of Merit)品質(zhì)因數(shù):
以上參數(shù)均為MEMS振鏡的本征參數(shù)。FoM(figure of merit)則是將以上重要參數(shù)融合后形成的描述激光雷達性能的綜合指標。根據(jù)行業(yè)經(jīng)驗,激光雷達為獲得良好性能,所選用的MEMS振鏡的FoM值應(yīng)更高,針對自動駕駛的激光雷達,F(xiàn)oM值至少為0.7。FoM值來源具體如下:
FoM=θe·de·fe其中,θe是激光雷達視場方向的有效光學掃描角,單位為rad; de是MEMS振鏡有效尺寸,單位為mm;
fe是MEMS振鏡的有效諧振頻率,單位為kHz;
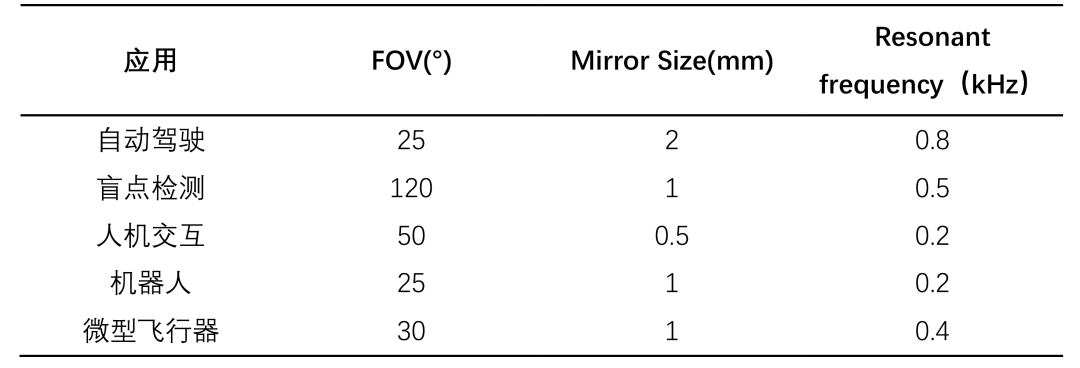
2. 多種用途激光雷達的MEMS振鏡參考
總體而言,MEMS振鏡的FoM值越大,越利于激光雷達性能提升。相較而言,單軸MEMS振鏡因整體結(jié)構(gòu)更為簡便,所以更容易得到更大的掃描角度,更大的光學孔徑和更高的諧振頻率。
美國佛羅里達大學的謝會開教授團隊針對多用途的激光雷達的MEMS振鏡選型給出基礎(chǔ)要求,如表-1所示。
表-1 不同應(yīng)用的激光雷達對于MEMS振鏡技術(shù)參數(shù)的最低要求
四、基于雙軸MEMS振鏡的激光雷達
圖1 雙軸MEMS振鏡的激光雷達以“點”掃“面”
雙軸MEMS振鏡因其具有兩個轉(zhuǎn)動軸,因此有三種掃描模式:雙軸諧振、單軸諧振/單軸非諧振、雙軸均非諧振。
因雙軸MEMS振鏡結(jié)構(gòu)及工藝較為繁雜,其掃描角度一般較小,圖中所示的雙軸振鏡其掃描角度約為15°×11°,一般需要配合外圍光學器件才可將FoV擴展到45°×11°。
美國佛羅里達大學的謝會開教授領(lǐng)導的研究團隊對市面上34款不同規(guī)格的雙軸MEMS振鏡的本征參數(shù)和FoM值進行了深入的研究和計算,其中僅有6款MEMS振鏡的FoM值大于0.7,其余28款MEMS振鏡的FoM均小于0.7。
五、基于單軸MEMS振鏡的激光雷達
圖2 單軸MEMS振鏡的激光雷達以“線”掃“面” 基于單軸振鏡的MEMS激光雷達中,單軸MEMS振鏡配合配合激光擴束透鏡,可以使得一維MEMS振鏡實現(xiàn)激光光束在水平方向和豎直方向的同步掃描。上圖為Infineon開發(fā)的基于單軸振鏡的MEMS激光雷達的原理圖。單軸MEMS振鏡的激光雷達工作狀態(tài)分為諧振式和非諧振式兩種。
另外,也有部分廠商將單軸MEMS振鏡放置在旋轉(zhuǎn)電機上,以實現(xiàn)二維掃描。
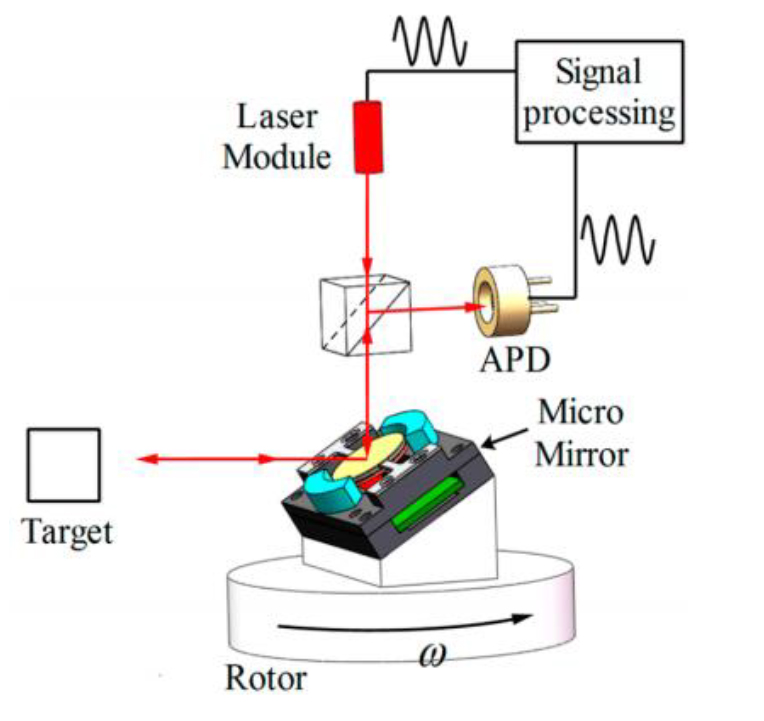
圖3放置于旋轉(zhuǎn)電機上單軸MEMS振鏡
同樣,美國佛羅里達大學的謝會開教授領(lǐng)導的研究團隊也對市面上二十余款不同規(guī)格的單軸MEMS振鏡的本征參數(shù)和FoM值進行了深入的研究和計算,其中FoM值大于1的MEMS振鏡超過50%,F(xiàn)oM大于0.7的超過14款,且單軸MEMS振鏡的激光雷達以“線”掃“面”,天然上擁有更高的幀率。
六、知微傳感C系列MEMS振鏡介紹
表-2 知微傳感C系列MEMS振鏡
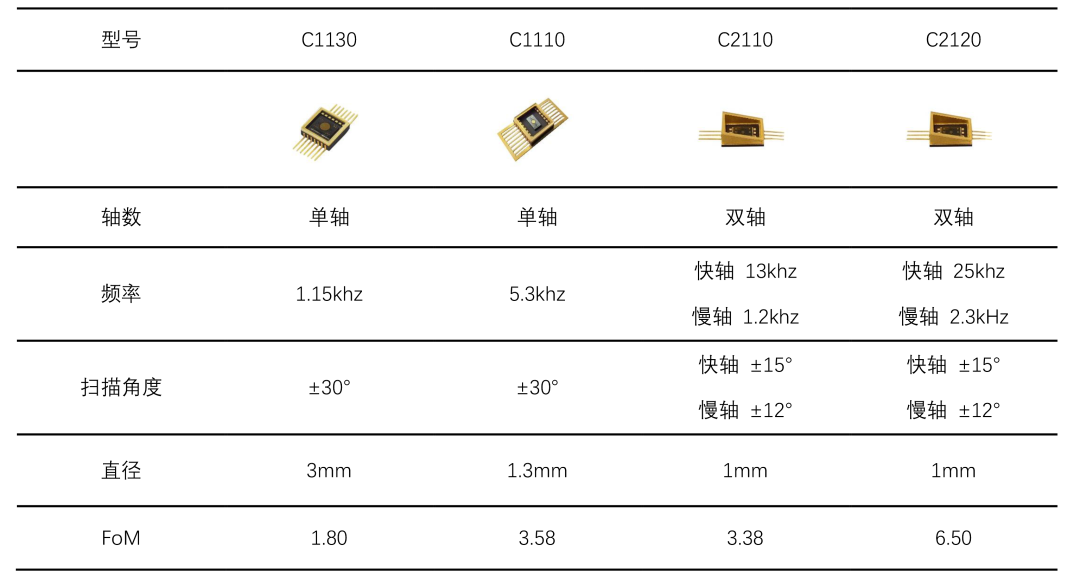
知微傳感是國內(nèi)MEMS振鏡領(lǐng)域內(nèi)的領(lǐng)軍企業(yè),在靜電驅(qū)動、電磁驅(qū)動兩種驅(qū)動技術(shù),以及光學反饋和電容反饋兩種檢測技術(shù)上均有深厚的技術(shù)積累和布局。目前有4款C系列MEMS芯片已完成量產(chǎn)工藝導入,支持批量交付,其部分本征參數(shù)及FoM值如表-2所示。FoM值均大于0.7,適用于自動駕駛、盲區(qū)監(jiān)測、人機交互、MAVs、機器人等激光雷達應(yīng)用領(lǐng)域,歡迎垂詢。
責任編輯:lq
-
傳感器
+關(guān)注
關(guān)注
2564文章
52834瀏覽量
765817 -
mems
+關(guān)注
關(guān)注
129文章
4119瀏覽量
193064 -
激光雷達
+關(guān)注
關(guān)注
971文章
4225瀏覽量
192551
原文標題:MEMS激光雷達——振鏡選型篇
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
激光雷達(LiDAR)技術(shù)方案與工作原理全解析

愛普生高精度車規(guī)晶振助力激光雷達自動駕駛

愛普生車規(guī)晶振FA2016AA激光雷達系統(tǒng)時鐘模塊的理想之選

激光雷達技術(shù):自動駕駛的應(yīng)用與發(fā)展趨勢

DeepSeek:2025年激光雷達技術(shù)與行業(yè)應(yīng)用趨勢

激光雷達領(lǐng)域的新秀利器—SPAD23


一則消息引爆激光雷達行業(yè)!特斯拉竟然在自研激光雷達?
激光雷達會傷害眼睛嗎?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論