") 鴻蒙內(nèi)核源碼:32級(jí)優(yōu)先級(jí)的進(jìn)程和線程調(diào)度
鴻蒙內(nèi)核源碼:32級(jí)優(yōu)先級(jí)的進(jìn)程和線程調(diào)度

先看四個(gè)宏定義,進(jìn)程和線程(線程就是任務(wù))最高和最低優(yōu)先級(jí)定義,[0,31]區(qū)間,即32級(jí),優(yōu)先級(jí)用于調(diào)度,CPU根據(jù)這個(gè)來(lái)決定先運(yùn)行哪個(gè)進(jìn)程和任務(wù)。
#define OS_PROCESS_PRIORITY_HIGHEST 0 //進(jìn)程最高優(yōu)先級(jí) #define OS_PROCESS_PRIORITY_LOWEST 31 //進(jìn)程最低優(yōu)先級(jí) #define OS_TASK_PRIORITY_HIGHEST 0 //任務(wù)最高優(yōu)先級(jí),軟時(shí)鐘任務(wù)就是最高級(jí)任務(wù),見(jiàn)于 OsSwtmrTaskCreate #define OS_TASK_PRIORITY_LOWEST 31 //任務(wù)最低優(yōu)先級(jí)
為何進(jìn)程和線程都是32個(gè)優(yōu)先級(jí)?
回答這個(gè)問(wèn)題之前,先回答另一個(gè)問(wèn)題,為什么人類(lèi)幾乎所有的文明都是用十進(jìn)制的計(jì)數(shù)方式。答案掰手指就知道了,因?yàn)槿擞惺种割^。瑪雅人的二十進(jìn)制那是把腳指頭算上了,但其實(shí)也算是十進(jìn)制的表示。
這是否說(shuō)明一個(gè)問(wèn)題,認(rèn)知受環(huán)境的影響,方向是怎么簡(jiǎn)單/方便怎么來(lái)。這也可以解釋為什么人類(lèi)語(yǔ)言發(fā)音包括各種方言對(duì)媽媽這個(gè)詞都很類(lèi)似,因?yàn)閶雰赫f(shuō)mama是最容易的。注意認(rèn)識(shí)這點(diǎn)很重要!
而計(jì)算機(jī)的世界是二進(jìn)制的,是是非非,清清楚楚,特別的簡(jiǎn)單,二進(jìn)制已經(jīng)最簡(jiǎn)單了,到底啦,不可能有更簡(jiǎn)單的了。還記得雙向鏈表篇中說(shuō)過(guò)的嗎,因?yàn)楹?jiǎn)單所以才不簡(jiǎn)單啊,大道若簡(jiǎn),計(jì)算機(jī)就靠著這01碼,表述萬(wàn)千世界。
但人類(lèi)的大腦不擅長(zhǎng)存儲(chǔ),二進(jìn)制太長(zhǎng)了數(shù)到100就撐爆了大腦,記不住,為了記憶和運(yùn)算方便,編程常用靠近10進(jìn)制的 16進(jìn)制來(lái)表示 ,0x9527ABCD看著比 0011000111100101010100111舒服多了。
應(yīng)用開(kāi)發(fā)和內(nèi)核開(kāi)發(fā)有哪些區(qū)別?
區(qū)別還是很大的,這里只說(shuō)一點(diǎn),就是對(duì)位的控制能力,內(nèi)核會(huì)出現(xiàn)大量的按位運(yùn)算(&,|,~,^) , 一個(gè)變量的不同位表達(dá)不同的含義,但這在應(yīng)用程序員那是很少看到的,他們用的更多的是邏輯運(yùn)算(&&,||,!)
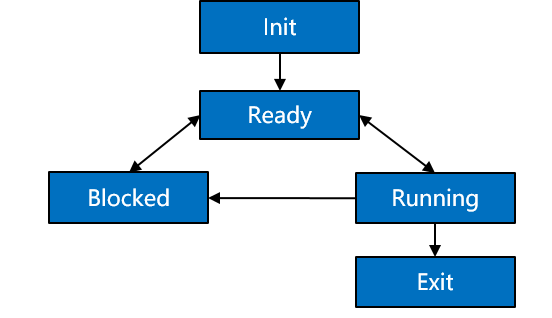
#define OS_TASK_STATUS_INIT 0x0001U //初始化狀態(tài) #define OS_TASK_STATUS_READY 0x0002U //就緒狀態(tài)的任務(wù)都將插入就緒隊(duì)列 #define OS_TASK_STATUS_RUNNING 0x0004U //運(yùn)行狀態(tài) #define OS_TASK_STATUS_SUSPEND 0x0008U //掛起狀態(tài) #define OS_TASK_STATUS_PEND 0x0010U //阻塞狀態(tài)
這是任務(wù)各種狀態(tài)(注者后續(xù)將比如成貼標(biāo)簽)表述,將它們還原成二進(jìn)制就是:
0000000000000001 =0x0001U
0000000000000010 =0x0002U
0000000000000100 =0x0004U
0000000000001000 =0x0008U
0000000000010000 =0x0010U
發(fā)現(xiàn)二進(jìn)制這邊的區(qū)別沒(méi)有,用每一位來(lái)表示一種不同的狀態(tài),1表示是,0表示不是。
這樣的好處有兩點(diǎn):
1.可以多種標(biāo)簽同時(shí)存在比如 0x07 = 0b00000111,對(duì)應(yīng)以上就是任務(wù)有三個(gè)標(biāo)簽(初始,就緒,和運(yùn)行),進(jìn)程和線程在運(yùn)行期間是允許多種標(biāo)簽同時(shí)存在的。
2.節(jié)省了空間,一個(gè)變量就搞定了,如果是應(yīng)用程序員要實(shí)現(xiàn)這三個(gè)標(biāo)簽同時(shí)存在,習(xí)慣上要定義三個(gè)變量的,因?yàn)槟愕呐潘灶w粒度是一個(gè)變量而不是一個(gè)位。
而對(duì)位的管理/運(yùn)算就需要有個(gè)專(zhuān)門(mén)的管理器:位圖管理器 (見(jiàn)源碼 los_bitmap.c )
什么是位圖管理器?
直接上部分代碼,代碼關(guān)鍵地方都加了中文注釋?zhuān)?jiǎn)單說(shuō)就是對(duì)位的各種操作,比如如何在某個(gè)位上設(shè)1?如何找到最高位為1的是哪個(gè)位置?這些函數(shù)都是有大用途的。
//對(duì)狀態(tài)字的某一標(biāo)志位進(jìn)行置1操作
VOID LOS_BitmapSet(UINT32 *bitmap, UINT16 pos)
{
if (bitmap == NULL) {
return;
}
*bitmap |= 1U << (pos & OS_BITMAP_MASK);//在對(duì)應(yīng)位上置1
}
//對(duì)狀態(tài)字的某一標(biāo)志位進(jìn)行清0操作
VOID LOS_BitmapClr(UINT32 *bitmap, UINT16 pos)
{
if (bitmap == NULL) {
return;
}
*bitmap &= ~(1U << (pos & OS_BITMAP_MASK));//在對(duì)應(yīng)位上置0
}
/********************************************************
雜項(xiàng)算術(shù)指令
CLZ 用于計(jì)算操作數(shù)最高端0的個(gè)數(shù),這條指令主要用于一下兩個(gè)場(chǎng)合
計(jì)算操作數(shù)規(guī)范化(使其最高位為1)時(shí)需要左移的位數(shù)
確定一個(gè)優(yōu)先級(jí)掩碼中最高優(yōu)先級(jí)
********************************************************/
//獲取狀態(tài)字中為1的最高位 例如: 00110110 返回 5
UINT16 LOS_HighBitGet(UINT32 bitmap)
{
if (bitmap == 0) {
return LOS_INVALID_BIT_INDEX;
}
return (OS_BITMAP_MASK - CLZ(bitmap));
}
//獲取狀態(tài)字中為1的最低位, 例如: 00110110 返回 2
UINT16 LOS_LowBitGet(UINT32 bitmap)
{
if (bitmap == 0) {
return LOS_INVALID_BIT_INDEX;
}
return CTZ(bitmap);//
}
位圖在哪些地方應(yīng)用?
內(nèi)核很多模塊在使用位圖,這里只說(shuō)進(jìn)程和線程模塊,還記得開(kāi)始的問(wèn)題嗎,為何進(jìn)程和線程都是32個(gè)優(yōu)先級(jí)?因?yàn)樗麄兊膬?yōu)先級(jí)是由位圖管理的,管理一個(gè)UINT32的變量,所以是32級(jí),一個(gè)位一個(gè)級(jí)別,最高位優(yōu)先級(jí)最低。
UINT32 priBitMap; /**< BitMap for recording the change of task priority, //任務(wù)在執(zhí)行過(guò)程中優(yōu)先級(jí)會(huì)經(jīng)常變化,這個(gè)變量用來(lái)記錄所有曾經(jīng)變化
the priority can not be greater than 31 */ //過(guò)的優(yōu)先級(jí),例如 ..01001011 曾經(jīng)有過(guò) 0,1,3,6 優(yōu)先級(jí)
這是任務(wù)控制塊中對(duì)調(diào)度優(yōu)先級(jí)位圖的定義,注意一個(gè)任務(wù)的優(yōu)先級(jí)在運(yùn)行過(guò)程中可不是一成不變的,內(nèi)核會(huì)根據(jù)運(yùn)行情況而改變它的,這個(gè)變量是用來(lái)保存這個(gè)任務(wù)曾經(jīng)有過(guò)的所有優(yōu)先級(jí)歷史記錄。
比如 任務(wù)A的優(yōu)先級(jí)位圖是 00000001001011 ,可以看出它曾經(jīng)有過(guò)四個(gè)調(diào)度等級(jí)記錄,那如果想知道優(yōu)先級(jí)最低的記錄是多少時(shí)怎么辦呢?
誒,上面的位圖管理器函數(shù)UINT16 LOS_HighBitGet(UINT32 bitmap)就很有用啦 ,它返回的是1在高位出現(xiàn)的位置,可以數(shù)一下是 6
因?yàn)槿蝿?wù)的優(yōu)先級(jí)0最大,所以最終的意思就是A任務(wù)曾經(jīng)有過(guò)的最低優(yōu)先級(jí)是6
一定要理解位圖的操作,內(nèi)核中大量存在這類(lèi)代碼,尤其到了匯編層,對(duì)寄存器的操作大量的出現(xiàn)。
比如以下這段匯編代碼。
MSR CPSR_c, #(CPSR_INT_DISABLE | CPSR_SVC_MODE) @禁止中斷并切到管理模式
LDRH R1, [R0, #4] @將存儲(chǔ)器地址為R0+4 的低16位數(shù)據(jù)讀入寄存器R1,并將R1的高16 位清零
ORR R1, #OS_TASK_STATUS_RUNNING @或指令 R1=R1|OS_TASK_STATUS_RUNNING
STRH R1, [R0, #4] @將寄存器R1中的低16位寫(xiě)入以R0+4為地址的存儲(chǔ)器中
編程實(shí)例
對(duì)數(shù)據(jù)實(shí)現(xiàn)位操作,本實(shí)例實(shí)現(xiàn)如下功能:
某一標(biāo)志位置1。
獲取標(biāo)志位為1的最高bit位。
某一標(biāo)志位清0。
獲取標(biāo)志位為1的最低bit位。
#include "los_bitmap.h"
#include "los_printf.h"
static UINT32 Bit_Sample(VOID)
{
UINT32 flag = 0x10101010;
UINT16 pos;
dprintf("\nBitmap Sample!\n");
dprintf("The flag is 0x%8x\n", flag);
pos = 8;
LOS_BitmapSet(&flag, pos);
dprintf("LOS_BitmapSet:\t pos : %d, the flag is 0x%0+8x\n", pos, flag);
pos = LOS_HighBitGet(flag);
dprintf("LOS_HighBitGet:\t The highest one bit is %d, the flag is 0x%0+8x\n", pos, flag);
LOS_BitmapClr(&flag, pos);
dprintf("LOS_BitmapClr:\t pos : %d, the flag is 0x%0+8x\n", pos, flag);
pos = LOS_LowBitGet(flag);
dprintf("LOS_LowBitGet:\t The lowest one bit is %d, the flag is 0x%0+8x\n\n", pos, flag);
return LOS_OK;
}
結(jié)果驗(yàn)證
Bitmap Sample! The flag is 0x10101010 LOS_BitmapSet: pos : 8, the flag is 0x10101110 LOS_HighBitGet:The highest one bit is 28, the flag is 0x10101110 LOS_BitmapClr: pos : 28, the flag is 0x00101110 LOS_LowBitGet: The lowest one bit is 4, the flag is 0x00101110
編輯:hfy
-
cpu
+關(guān)注
關(guān)注
68文章
11070瀏覽量
216786 -
鴻蒙系統(tǒng)
+關(guān)注
關(guān)注
183文章
2642瀏覽量
68013
發(fā)布評(píng)論請(qǐng)先 登錄
基于優(yōu)先級(jí)搶占系統(tǒng)的QNX調(diào)度算法
基于優(yōu)先級(jí)調(diào)度的嵌入式實(shí)時(shí)操作系統(tǒng)內(nèi)核詳解(上)
用戶級(jí)線程和內(nèi)核級(jí)線程
任務(wù)優(yōu)先級(jí)問(wèn)題
【HarmonyOS】鴻蒙內(nèi)核源碼分析(調(diào)度機(jī)制篇)
鴻蒙內(nèi)核源碼分析(調(diào)度機(jī)制篇):Task是如何被調(diào)度執(zhí)行的
鴻蒙內(nèi)核源碼分析(調(diào)度隊(duì)列篇):進(jìn)程和Task的就緒隊(duì)列對(duì)調(diào)度的作用
鴻蒙內(nèi)核源碼分析(Task管理篇):task是內(nèi)核調(diào)度的單元
rt-thread高優(yōu)先級(jí)的線程可以調(diào)度執(zhí)行嗎?
Linux內(nèi)核線程優(yōu)先級(jí)設(shè)置的方法介紹
鴻蒙內(nèi)核源碼分析:任務(wù)池管理技術(shù)
鴻蒙內(nèi)核源碼分析:task是內(nèi)核調(diào)度的單元

cortex M內(nèi)核優(yōu)先級(jí)設(shè)置

uC/OS-II學(xué)習(xí)筆記——優(yōu)先級(jí)反轉(zhuǎn)與優(yōu)先級(jí)繼承機(jī)制
基于優(yōu)先級(jí)調(diào)度的嵌入式實(shí)時(shí)操作系統(tǒng)內(nèi)核詳解(下)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論