 工業物流機器人系統關于工業移動機器的應用
工業物流機器人系統關于工業移動機器的應用

工業物流機器人系統主要有業務系統、調度系統和工業移動機器人三大部分組成。
1、業務系統指客戶的 MES、ERP、WMS,跟調度系統進行數據交互,主要是給調度系統發送任務;
2、調度系統是銜接業務系統和機器人中間的中間層,將業務系統的任務轉換成機器人的作業任務,調度機器人執行作業任務,規劃機器人的運動路徑,此外還具備機器人管理、現場設備管理、地圖管理、調度仿真等功能;
3、工業移動機器人為最終執行終端,執行調度系統發出的作業任務,達到業務系統的需求。
本次介紹的是工業移動機器這部分。
工業移動機器人指應用在工業及物流領域中,裝備有導航裝置,并有車載控制系統控制,以輪式移動為特征,自帶動力或動力轉換裝置的機器人。
按照導航方式劃分,工業移動機器人可以劃分電磁導航機器人、磁帶導航機器人、磁釘導航機器人、色帶導航機器人、激光導航機器人、視覺導航機器人、二維碼導航機器人、RFID 導航機器人、慣性導航機器人、基站導航機器人及其他復合型導航機器人。
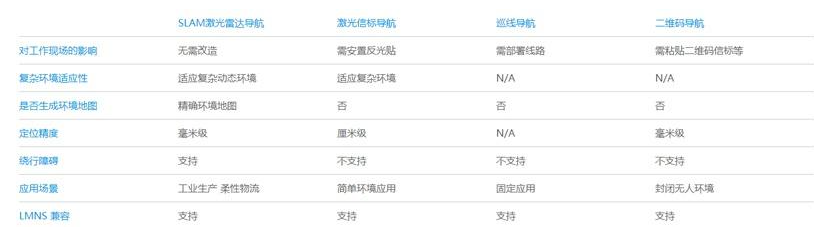
目前應用在工業環境的主流導航機器人有磁帶導航機器人、二維碼導航機器人和激光導航機器人,而上述的三種機器人分別屬于三個跨代技術的產品,一代比一代先進,下圖是幾種導航方式的對比。
斯坦德機器人采用自研的機器人底層定位算法、操作系統、控制器等核心技術,開發了 Oasis300UL 和 Oasis600UL 兩款 SLAM 激光自然導航移動機器人平臺,并以此為基礎,采用移動機器人平臺+功能模式的方式拓展適用于不同應用場景、具有特定功能、滿足客戶實際需求的移動機器人。
(1)棧板背負移動機器人
采用移動機器人平臺+頂升背負模組,實現機器人背負棧板并轉運棧板的功能,一般應用于原材料倉到產線端的物料轉運。
(2)料車牽引移動機器人
采用移動機器人平臺+頂升牽引模組,實現機器人潛伏式背負料車,一般應用于在線邊倉到產線或者產線之間的轉移。對于空間要求較高的場景,還能通過頂升牽引模組的旋轉功能,保證料車不旋轉,實現料車的橫向移動。
(3)協作移動機器人
采用移動機器人平臺+協作機械臂,實現物料抓取功能,完成自動上下料的工作,一般應用于產線內成品的下料和原材料的上料, 1 臺機器人可對接多個工位。目前我司可適配市面上主流的協作機械臂,可選擇 5Kg/10kg/15Kg 三種級別的機械臂。
(4)傳輸移動機器人
采用移動機器人平臺+傳輸模組,目前可根據客戶需求選擇滾筒、皮帶、鏈條等多種形式,一般應用于產線間物料轉運或者產線到成品倉物料轉運。
斯坦德通過上述的 4 大類的機器人,實現了工廠內,從倉庫或線邊倉到產線、產線間以及產線到成品倉的物料轉運。
編輯:hfy
-
機器人
+關注
關注
213文章
29663瀏覽量
212381 -
移動機器人
+關注
關注
2文章
788瀏覽量
34095
發布評論請先 登錄
瑞芯微 RK3568/3588:為移動機器人注入智慧動力引擎
工業通信界的“月老”:CC\\-Link IE和DeviceNet如何牽起機器人的“紅線”
輪式移動機器人電機驅動系統的研究與開發
工業機器人與協作機器人概念不同

工業設施數字孿生中的機器人仿真

工業機器人工作站的建設意義
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型

移動機器人的技術突破和未來展望

智能移動機器人系統方案指南

工業機器人常用的編程方式
智能移動機器人

如何借助恩智浦MCX系列MCU糾錯功能,打造可靠安全的移動機器人?

工業機器人AMR的最強大腦,你了解多少?






 工商網監
工商網監
評論