 小安派BW21-CBV-Kit入門教程之MPU6050 IMU零點檢測
小安派BW21-CBV-Kit入門教程之MPU6050 IMU零點檢測

作為一款本地AI圖象識別開發板,BW21-CBV-Kit它能夠獨自運行目標識別模型。2.4GHz+5GHz的雙頻Wi-Fi,提供高性能的無線傳輸能力,讓圖象傳輸更加流暢。豐富的接口,搭配著AI識別,可以擴展出無限可能。
BW21-CBV-Kit支持Arduino的開發方式,可以簡單實現一些DIY想法,例如:人臉識別、手勢識別、物品識別等。
這次小安給大家帶來的是MPU6050 IMU 零點檢測:
用料
BW21-CBV-Kit x 1
MPU6050 x 1
示例
簡介
本示例將演示如何校準 MPU6050 IMU。
實現流程
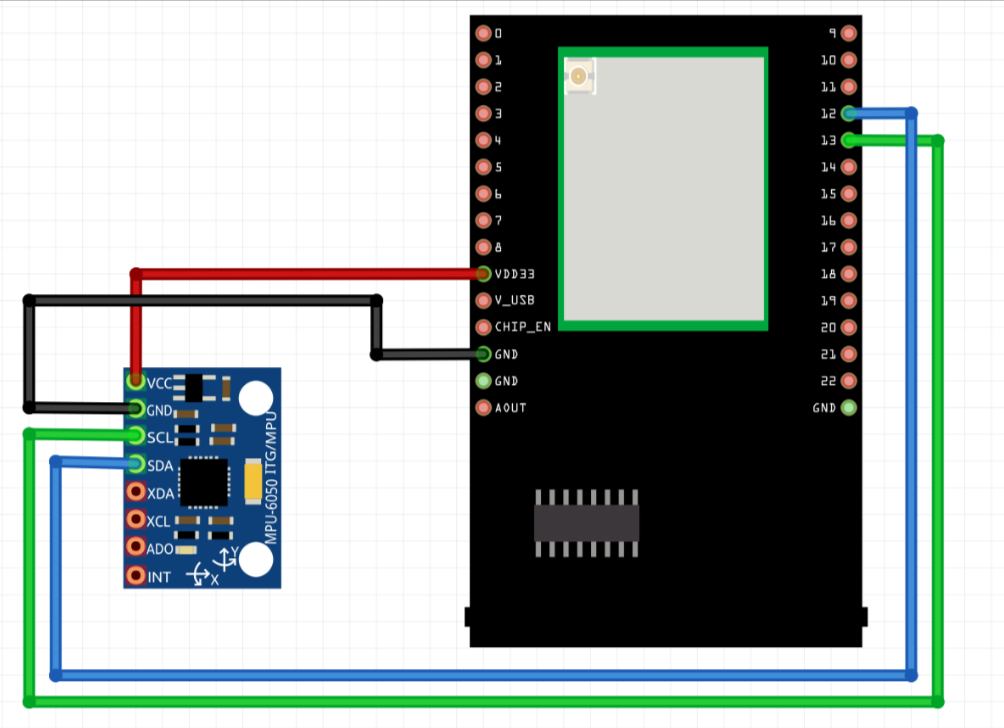
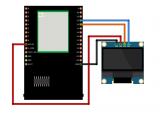
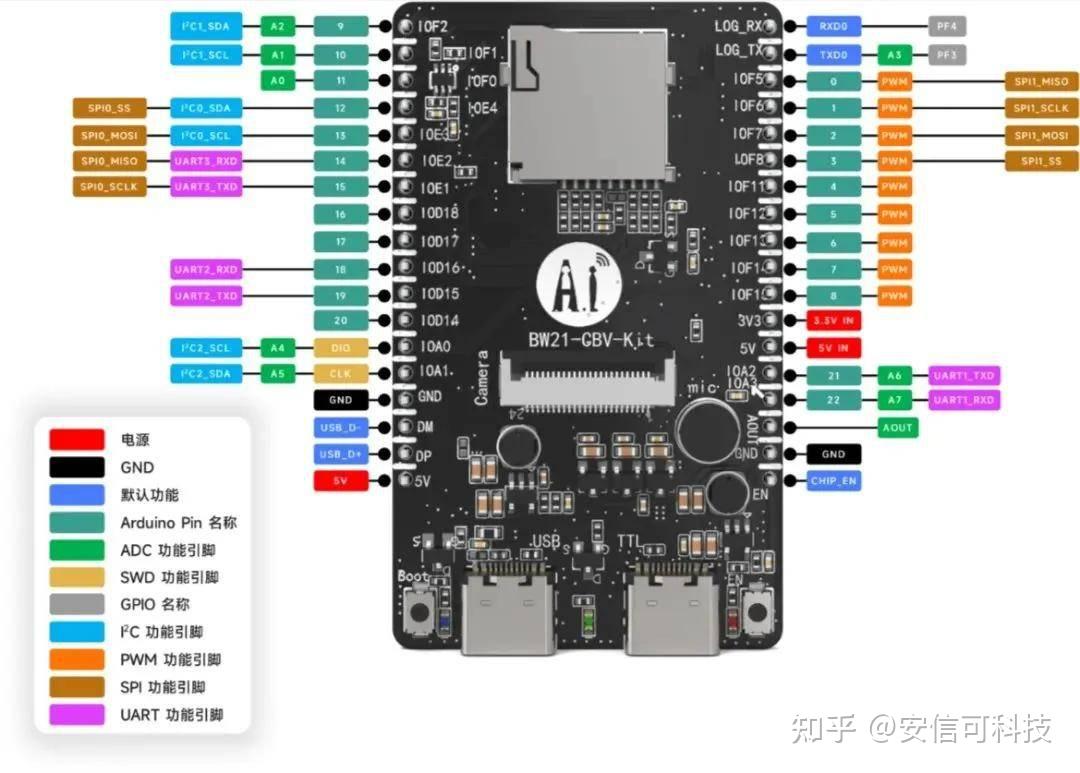
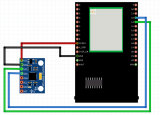
如下圖所示,將 MPU6050 連接到電路板的 I2C_SDA 和 I2C_SCL
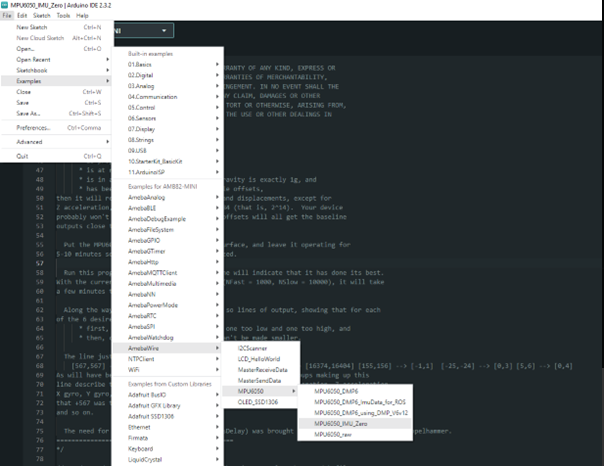
在 "文件"->"示例"->"AmebaWire"->"MPU6050"->"MPU6050_IMU_Zero "中打開示例。
如果 MPU6050 已具備一下條件:
· 是同類產品中的理想成員
· 已適當預熱
· 處于中立位置
· 處于重力拉力正好為 1g 的位置
· 已裝入最佳偏置
則所有加速度和位移都將報告為 0,但 Z 加速度除外,它將報告為 16384(即 214)。 您的設備可能不會做得這么好,但良好的偏移都會使基線輸出接近這些目標值。 將 MPU6050 放置在水平的平面上,讓其工作 5-10 分鐘,使其溫度趨于穩定。
編譯并運行此示例。 一行"--已完成--"將表明它已盡了最大努力。 按照當前的精度相關常量(NFast = 1000,NSlow = 10000),需要幾分鐘才能達到目標。 在此過程中,它會產生十幾行輸出,顯示對于 6 個所需偏移量中的每一個偏移量,它都是:
首先,試圖找到兩個估計值,一個過低,一個過高;
然后,縮小括號,直到不能再縮小為止。
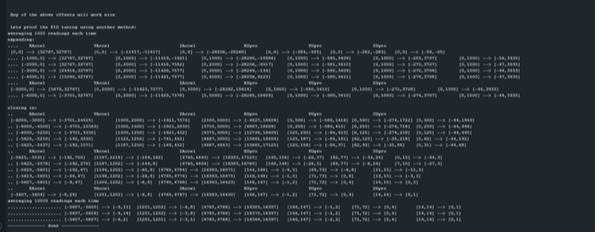
在 "已完成 "行上方的一行看起來類似于 [567,567] -> [-1,2] [-2223,-2223] -> [0,1] [1131,1132] -> [16374,16404] [155,156] -> [-1,1] [-25,-24] -> [0,3] [5,6] -> [0,4]。
正如穿插的標題行所示,組成這一行的六組分別描述了 X 加速度、Y 加速度、Z 加速度、X 陀螺儀、Y 陀螺儀和 Z 陀螺儀的最佳偏移量。 在上面的示例中,試驗顯示 +567 是 X 加速度的最佳偏移量,-2223 是 Y 加速度的最佳偏移量,以此類推。
下面是運行此示例的串行監視器輸出。

代碼參考
[1] ElectronicCats 的 MPU6050 庫和示例:
https://github.com/ElectronicCats/mpu6050
-
AI
+關注
關注
88文章
34917瀏覽量
277998 -
開發板
+關注
關注
25文章
5646瀏覽量
103960 -
IMU
+關注
關注
6文章
353瀏覽量
46664
原文標題:【人臉+手勢AI識別】BW21-CBV-Kit——MPU6050 IMU 零點檢測
文章出處:【微信號:安信可科技,微信公眾號:安信可科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
小安派BW21-CBV-Kit開發板教程——I2C之主機掃描設備

小安派BW21-CBV-Kit入門教程之主機模式讀取Arduino UNO從機

小安派BW21-CBV-Kit入門教程之讀取DHT溫濕度傳感器
用AI人臉識別開發板BW21-CBV-Kit驅動墨水屏

小安派BW21-CBV-Kit入門教程之OLED顯示
小安派BW21-CBV-Kit入門教程之主機模式對Arduino UNO發送數據

BW21-CBV-Kit的使用教程
BW21-CBV-Kit快速入門之Arduino環境搭建

小安派BW21-CBV-Kit入門教程:中斷控制LED

小安派BW21-CBV-Kit入門教程之超聲波測距

BW21-CBV-Kit如何接入HomeAssistant實時查看AI攝像頭畫面

直接送!50套小安派 BW21-CBV-Kit Ai圖像識別開發板!
用安信可AI人臉識別開發板BW21-CBV-Kit驅動墨水屏

小安派BW21-CBV-Kit入門教程之LCD屏顯示數據
小安派BW21-CBV-Kit入門教程之DMP6讀取MPU6050數據





 工商網監
工商網監
評論