") 關(guān)于“無(wú)人駕駛”的技術(shù)路線
關(guān)于“無(wú)人駕駛”的技術(shù)路線

無(wú)人駕駛車輛真要跑起來(lái),需要解決感知、決策和執(zhí)行等層面的技術(shù)問(wèn)題。感知系統(tǒng)也稱為“中層控制系統(tǒng)”,負(fù)責(zé)感知周圍的環(huán)境,并進(jìn)行識(shí)別和分析;決策系統(tǒng)也稱為“上層控制系統(tǒng)”,負(fù)責(zé)路徑規(guī)劃和導(dǎo)航;執(zhí)行系統(tǒng)又稱為“底層控制系統(tǒng)”,負(fù)責(zé)汽車的加速、剎車和轉(zhuǎn)向。本文以“感知—決策—執(zhí)行”的順序呈現(xiàn),是因?yàn)檫@樣更加符合人類的駕駛模式。如,先看看前面——綠燈、周圍無(wú)行人——收集信息;然后做出決策——可以通行;最后執(zhí)行決策——開(kāi)過(guò)十字路口。
自動(dòng)駕駛的感知系統(tǒng)
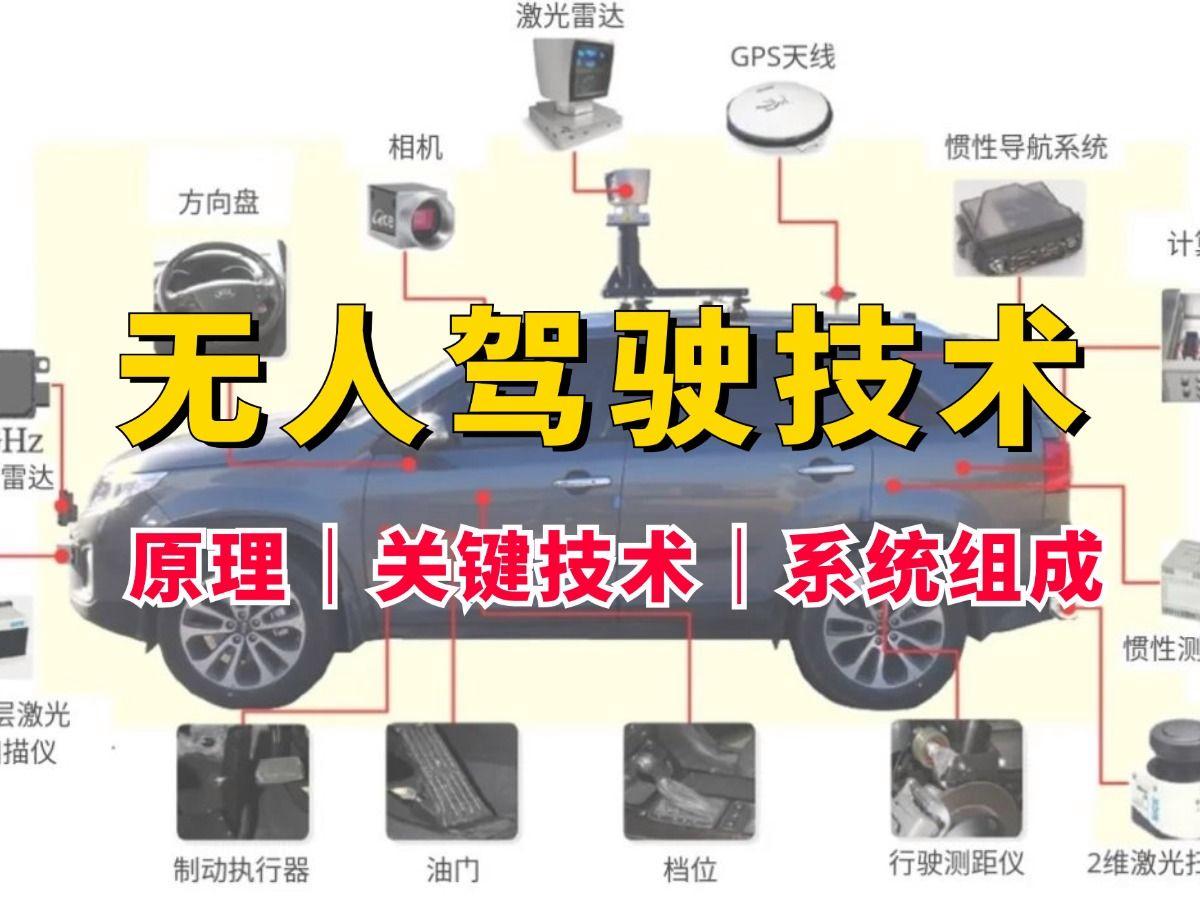
感知系統(tǒng)的輸入設(shè)備具體包括光學(xué)攝像頭、光學(xué)雷達(dá)(LiDAR)、微波雷達(dá)、導(dǎo)航系統(tǒng)等。這些傳感器收集周圍的信息,為感知系統(tǒng)提供全面的環(huán)境數(shù)據(jù)。
光學(xué)攝像頭是目前最便宜也是最常用的車載傳感器,它的一大優(yōu)點(diǎn)就是可以分辨顏色,因此也成為場(chǎng)景解讀的絕佳工具。但其缺點(diǎn)也很明顯:1.缺乏“深度”這一維度,沒(méi)有立體視覺(jué)就無(wú)法判斷物體和相機(jī)(可以換算為車輛)間的距離;2.對(duì)光線過(guò)于敏感,過(guò)暗或過(guò)強(qiáng)的光線以及二者之間的快速切變,比如駛?cè)牒婉偝鏊淼蓝甲阋杂绊懰某上瘛?/p>
激光雷達(dá),即利用激光來(lái)進(jìn)行探測(cè)和測(cè)量。其原理是向周圍發(fā)射脈沖激光,遇到物體后反射回來(lái),通過(guò)來(lái)回的時(shí)間差,計(jì)算出距離,從而對(duì)周圍環(huán)境建立起三維模型。激光雷達(dá)探測(cè)精度高、距離長(zhǎng);由于激光的波長(zhǎng)短,所以可以探測(cè)到非常微小的目標(biāo),并且探測(cè)距離很長(zhǎng)。微波雷達(dá)的原理和激光雷達(dá)類似,不過(guò)它發(fā)射的是無(wú)線電波而不是激光。微波雷達(dá)精度不及激光雷達(dá),但勝在價(jià)格低、體積小,在某些車輛行駛輔助系統(tǒng)中已經(jīng)得到了廣泛應(yīng)用。同時(shí),精度低反過(guò)來(lái)又成了微波雷達(dá)的優(yōu)點(diǎn),因?yàn)樗^大的波長(zhǎng)可以穿透霧、煙、灰塵等激光雷達(dá)難以穿透的障礙,較好免疫惡劣天氣。
光學(xué)攝像頭和雷達(dá)測(cè)量在感知環(huán)境中相輔相成,共同為無(wú)人駕駛車輛提供完整、準(zhǔn)確的外部信息。有了“眼睛”接收信息,接下來(lái)就是利用深度學(xué)習(xí)等手段對(duì)信息進(jìn)行識(shí)別。將多種傳感器的信息相互融合并不是一件容易的事情,可以利用韋伯斯的誤差反向傳播算法和先進(jìn)的數(shù)字?jǐn)z像技術(shù)對(duì)外界事物進(jìn)行準(zhǔn)確識(shí)別。
自動(dòng)駕駛的感知系統(tǒng)不僅包括它的“眼睛”,還包括它的“大腦”——高精度地圖。人類駕駛者會(huì)調(diào)用記憶中熟悉的道路場(chǎng)景來(lái)輔助駕駛,自動(dòng)駕駛也會(huì)通過(guò)高精度地圖獲取必要的環(huán)境信息特別是相對(duì)固定、更新周期較長(zhǎng)的信息,如交通信號(hào)燈(請(qǐng)注意,這里是指物理的“燈”本身而非“燈的信號(hào)”即紅、黃、綠)、車道標(biāo)記、路緣等。這些信息還可以與傳感器所獲得的“即時(shí)信息”相印證,從而實(shí)現(xiàn)“多傳感器融合”的效果,就像我們走路,不僅會(huì)用眼睛看前面的路,還會(huì)用耳朵聽(tīng)身后的車,甚至?xí)帽亲勇劼愤吺称返昀锏南銡庖粯印R虼耍詣?dòng)駕駛?cè)ァ案兄钡牟粌H僅是“眼睛”,也是“大腦”。
自動(dòng)駕駛的決策系統(tǒng)
自動(dòng)駕駛決策系統(tǒng)負(fù)責(zé)路線規(guī)劃和實(shí)時(shí)導(dǎo)航,這里主要涉及高精度地圖,又稱“高清數(shù)字地圖”。無(wú)人駕駛汽車用的并不是普通的導(dǎo)航地圖,它在精確度和信息量上與普通地圖差別很大,因而被稱為“高精度地圖”。普通地圖比較粗糙——因?yàn)槲覀內(nèi)祟惖恼J(rèn)知能力足以“腦補(bǔ)”,通過(guò)簡(jiǎn)單的二維線條的表示就知道了道路的走向,線條的交叉點(diǎn)表示十字路口——這讓目前的機(jī)器來(lái)“腦補(bǔ)”就太難了。高清數(shù)字地圖的精度一般在厘米級(jí),而且是立體三維的,包含車道線、周圍設(shè)施的坐標(biāo)位置等行車輔助信息。與人類當(dāng)前使用的電子地圖相比,自動(dòng)駕駛的高精度地圖還有一個(gè)重要差異在于,高精度地圖會(huì)收集道路激光雷達(dá)的反射強(qiáng)度——這是一個(gè)對(duì)人類駕駛者幾無(wú)價(jià)值而對(duì)“人工智能駕駛員”意義重大的道路特征,它變化很慢而且小,是幫助自動(dòng)駕駛車輛光學(xué)雷達(dá)定位的一個(gè)理想特征值。通過(guò)光學(xué)雷達(dá)掃描獲取的信息跟已知的高精度地圖信息對(duì)比,就可以確定當(dāng)前車輛的位置。
自動(dòng)駕駛的決策系統(tǒng)不僅需要獨(dú)立的“智能車輛”,也需要“智能交通系統(tǒng)”的支持,如V2V等。在高精度地圖之外,另一個(gè)支持路徑規(guī)劃的技術(shù)是V2X,一般認(rèn)為它是在V2I的基礎(chǔ)上發(fā)展起來(lái)的。V2X意指將車輛和環(huán)境形成一個(gè)“物聯(lián)網(wǎng)”,包括車對(duì)車、車對(duì)基礎(chǔ)設(shè)施,以及車對(duì)行人等一系列通信系統(tǒng)。如果車輛能夠直接“得到”,而不僅僅是“看到”信號(hào)燈的信息,就能保證絕對(duì)不闖紅燈。這里“得到”的意思是,比如在離交通燈還有100米、傳感器還“看不到”的時(shí)候,信號(hào)燈就主動(dòng)“告訴”車輛自己的信號(hào)狀態(tài)及變化時(shí)長(zhǎng),自動(dòng)駕駛車輛無(wú)需直接“看清”信號(hào)燈的內(nèi)容(“看清”有時(shí)是很不容易的事情,大雨、暴雪天氣,狂風(fēng)刮起的塑料袋,以及大貨車的遮擋,都足以讓車輛的攝像頭“看不見(jiàn)”交通信號(hào)燈)。此外,如果能夠提前得知周圍車輛的行車意圖,就能夠很大程度上避免事故的發(fā)生。
有了高精度數(shù)字地圖和V2X通信網(wǎng)絡(luò),系統(tǒng)就可以應(yīng)用搜索算法評(píng)估各種駕駛行為所花費(fèi)的成本,包括信號(hào)燈等待時(shí)間、道路擁堵情況、路面維修情況等,以此獲得最佳行駛路徑。
自動(dòng)駕駛的執(zhí)行系統(tǒng)
執(zhí)行系統(tǒng)也是底層控制系統(tǒng),負(fù)責(zé)執(zhí)行汽車的剎車、加速、轉(zhuǎn)向的具體操作。工程師們通過(guò)特制的“線控裝置”控制方向盤和油門,取代人類司機(jī)的手和腳,并配置多個(gè)處理器組成的子系統(tǒng),以此來(lái)穩(wěn)定、準(zhǔn)確地控制汽車的機(jī)械系統(tǒng)。這些子系統(tǒng),包括引擎控制單元(ECU)、制動(dòng)防抱死系統(tǒng)(ABS)、自動(dòng)變速箱控制系統(tǒng)(TCU)等,它們通過(guò)一個(gè)“總線”來(lái)進(jìn)行內(nèi)部通信,在汽車中稱作CAN總線協(xié)議。
CAN總線最關(guān)鍵的地方在于帶寬(bandwidth)和網(wǎng)絡(luò)穩(wěn)定性。帶寬是指數(shù)據(jù)在網(wǎng)絡(luò)中傳輸?shù)淖畲笏俾剩ǔR悦棵攵嗌賐its為單位來(lái)計(jì)算。對(duì)于無(wú)人駕駛汽車來(lái)說(shuō),精準(zhǔn)的控制和快速響應(yīng)至關(guān)重要,這意味著要提高總線帶寬的傳輸速度,對(duì)需要處理龐大數(shù)據(jù)的無(wú)人駕駛系統(tǒng)而言存在較高挑戰(zhàn)。同時(shí)處理各個(gè)傳感器傳遞過(guò)來(lái)的數(shù)據(jù)流時(shí),帶寬有時(shí)會(huì)面臨挑戰(zhàn),系統(tǒng)速度會(huì)大為下降。對(duì)整個(gè)反應(yīng)執(zhí)行過(guò)程而言,CAN總線的響應(yīng)時(shí)間變得很慢,這在實(shí)際駕駛中是不能接受的。其次,控制的平滑性也影響乘客體驗(yàn)。此外,作為一個(gè)網(wǎng)絡(luò),數(shù)據(jù)傳輸?shù)陌踩砸膊蝗莺鲆暎绻?a target="_blank">黑客成功攻擊了CAN總線,就能對(duì)汽車進(jìn)行控制。因此,提高底層網(wǎng)絡(luò)系統(tǒng)的防御能力和網(wǎng)絡(luò)容錯(cuò)性非常重要。
通過(guò)以上感知、決策與執(zhí)行三個(gè)系統(tǒng)分工合作,責(zé)任明確地控制汽車的運(yùn)行,就可以使無(wú)人駕駛汽車具備理論上“行駛”的條件。但正如《無(wú)人駕駛》一書作者胡迪·利普森和梅爾巴·庫(kù)曼所指出的,“雖然這種技術(shù)幾近準(zhǔn)備就緒,但是這一獨(dú)特技術(shù)所依存的社會(huì)環(huán)境可能還未準(zhǔn)備妥當(dāng)”。比如,相關(guān)立法較為滯后。然而,由于效率和安全方面的優(yōu)勢(shì),我們有理由相信:無(wú)人駕駛的時(shí)代終將到來(lái)。
-
傳感器
+關(guān)注
關(guān)注
2565文章
52869瀏覽量
766399 -
無(wú)人駕駛
+關(guān)注
關(guān)注
99文章
4170瀏覽量
123360
發(fā)布評(píng)論請(qǐng)先 登錄
智行者科技無(wú)人駕駛小巴落地海南

什么是低速無(wú)人駕駛,讓你一分鐘秒懂 #無(wú)人駕駛 #5g無(wú)人駕駛 #低速無(wú)人駕駛
無(wú)人駕駛技術(shù)未來(lái)在哪里?低速才是突破口

易控智駕無(wú)人駕駛技術(shù)再次取得新突破
無(wú)人駕駛解決方案包含哪些方面?感知、決策與控制
易控智駕發(fā)布礦山無(wú)人駕駛應(yīng)用落地成果
DeepSeek眼中的礦山無(wú)人駕駛
為什么聊自動(dòng)駕駛的越來(lái)越多,聊無(wú)人駕駛的越來(lái)越少?

小馬智行第六代無(wú)人駕駛Robotaxi亮相香港國(guó)際機(jī)場(chǎng)
測(cè)速雷達(dá)與無(wú)人駕駛技術(shù)的結(jié)合 測(cè)速雷達(dá)故障排除技巧
低速無(wú)人駕駛清掃機(jī)器人無(wú)線充電解決方案
UWB模塊如何助力無(wú)人駕駛技術(shù)
無(wú)線充電技術(shù)為低速無(wú)人駕駛清掃車注入無(wú)限動(dòng)力
特斯拉推出無(wú)人駕駛Model Y
5G賦能車聯(lián)網(wǎng),無(wú)人駕駛引領(lǐng)未來(lái)出行






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論