 中科院研發微納生物機器人,實現主動靶向癌癥治療
中科院研發微納生物機器人,實現主動靶向癌癥治療

近日,中國科學院深圳先進技術研究院蔡林濤團隊在微納生物機器人治療腫瘤研究中取得突破性進展,他設計了一種由順序性磁驅動和光觸發的 AI 微納機器人,并將其用于實現主動靶向的癌癥治療。
研究表明,該 AI 微納生物機器人通過內乏氧驅動和外磁場驅動實現自主靶向游動、以及磁 / 光序貫操控,在小鼠體內實現了磁控導航、腫瘤穿透和光熱消融。
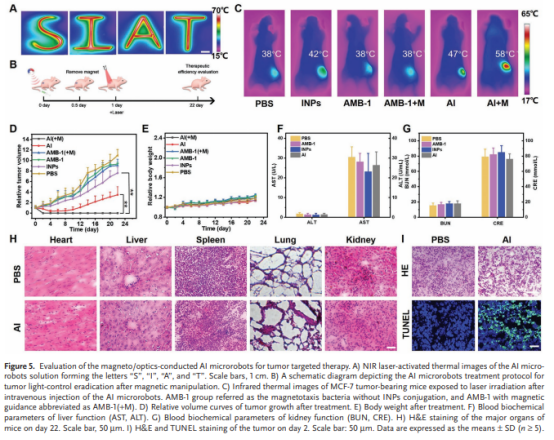
圖 | 蔡林濤發表關于 AI 微納生物機器人植入體內相關研究
如果該項技術應用于人體,可以簡單的理解為,在腫瘤患者體內植入 AI 微納生物機器人,它可以自動游向腫瘤病灶部位,并將腫瘤消除,隨后機器人本身可以被人體吸收,不會對健康造成任何損害。
吞下一個微納生物機器人,它可以像醫生一樣在人體內 “手術” 切割病灶,這樣的想法在醫學界被稱為 “吞下外科醫生” 幻想。是由諾貝爾物理學家查德?費曼在 1959 年率先提出的,他曾預言 “人類未來可以吞下外科醫生”。
如今,隨著醫學技術的飛速發展,人造微納機器人的研究得以深入,腦損傷、惡性腫瘤等醫學難題在微納機器人領域看到了希望,查德?費曼的美好幻想似乎真的要實現了。
采用可降解微生物,把 AI 微納機器人打造成鋼鐵俠
2019 世界機器人大會上,中國科學院沈陽自動化研究所研究員劉連慶提出,微納機器人的應用瓶頸是其材料的生物兼容性。
蔡林濤團隊在既往研究之上,選用海洋來源的趨磁細菌(AMB-1)作為模板,利用邁克爾加成反應將納米吲哚菁綠(Indocyanine green nanoparticles)光敏劑負載到細菌表面,構建了 AI 微納生物機器人(AI microrobot),再通過磁場操控和光學觸發,實現腫瘤穿透和光熱消融。
這里的 “AI” 指的是趨磁細菌(AMB-1)和吲哚菁綠納米顆粒(Indocyanine green nanoparticles),而不是傳統意義上的人工智能。
趨磁螺菌作為可降解的一種微生物,安全性很高。同時,不同于目前的微納機器人通過血液循環的被動靶向治療,趨磁螺菌可以自主 “游向” 腫瘤部位。
據蔡林濤介紹,趨磁螺菌主要通過兩種方式完成主動靶向游動,一方面是受內部乏氧驅動效應,對缺氧的腫瘤部分有靶向;另一方面,受外部磁場調控,會自主流向腫瘤部位。
這個過程,就是為微納機器人裝上一個能源動力系統,提升微納機器人到達病灶部位的精準度。
以趨磁螺菌為基礎,附加上由吲哚菁綠納米顆粒構成的光敏劑,用激光刺激光敏劑產生局部高溫,從而達到消除腫瘤細胞的目的。
為了確保過程中不會對正常組織細胞造成影響,蔡林濤將溫度控制在 50-52℃間,這個溫度區間腫瘤細胞的耐受能力差,幾分鐘就會被殺死。
吲哚菁綠還可作為熒光顯像劑,又結合細菌內磁小體的核磁共振成像完成體內的雙重可視化追蹤。
蔡林濤認為,整個研究最創新也是最核心的地方在于,在原來被動體系的基礎上加入了一個能源體系,類似于把微納機器人變成鋼鐵俠,可以在病患體內自主 “打怪”。
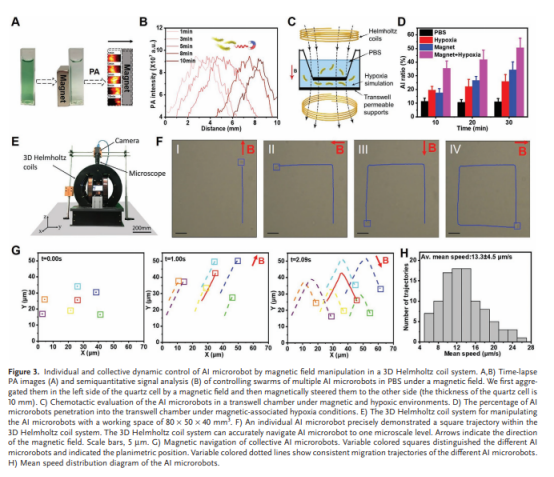
圖 | AI 微納生物機器人單一 / 群體控制
加載能源的 AI 微納機器人可穿透多種復雜生物屏障
目前,使用微納機器人技術在生物醫療領域的嘗試有很多,但如何克服復雜的生物內部結構是所有研究繞不開的難題。
以穿透屏障為例,蔡林濤針對三種不同的情況進行了詳細的解釋。
物理屏障:在實際臨床腫瘤治療中,腫瘤周圍存在著 “基質屏障”,這種像外殼一樣的細胞層具有高致密性,導致常規納米機器人很難穿透進腫瘤內部。
蔡林濤表示,通過磁場驅動的 AI 微納機器人能夠有效地穿透屏障,過程中也不會導致微納機器人變形。
生物屏障:在常規藥物治療中,藥物是通過分子蛋白通道進去到病灶區域,但惡性腫瘤如腦膠質瘤這種特殊情況具有對藥物的排斥性,這樣就會導致藥物無法輸送。AI 微納機器人通過外部磁場的拉動同樣能夠解決這樣的問題。同時,AI 微納機器人可以針對復雜環境畫出路徑,運動幅度 360° 不受限。
圖 | AI 微納生物機器人精準操控路徑
梯度屏障:常規藥物治療還受循環系統影響,無法抵達循環較差的病灶區。AI 微納機器人可以通過精確定位,完成對藥物的輸送。
蔡林濤表示,“AI 微納機器人不是靠滲透、擴散進去病灶區,而是通過主動靶向的方式。有了外在磁場能源的加持,AI 微納機器人可以突破很多生理屏障,到任何想要去的地方。”
增強微納機器人生物內驅動,是下一代藥遞送技術的核心
蔡林濤認為,現在微納機器人以機械力或電力驅動為主,未來微納機器人的驅動應該是生物化的,這是下一代藥遞送技術的核心。
生物內驅動的微納機器人能成為未來的關鍵取決于以下三點:
生物安全性高。生物本身融合屬性能讓其在完成工作后自動降解,不會在體內產生和殘留有害物質、以及造成額外副作用。
定點投遞精準度。根據生物本身的特殊性,可以讓其自主游向乏氧區域,進而保障微納機器人能夠精準達到病灶,不會到達身體不需要治療的區域。
驅動控制更高效。點對點激光觸發局部高溫非常考驗精細化操作,如果熱量彌散會導致傷害身體健康細胞,定點投遞精準的同時,還可保證后期激光進行高效的定點釋放。
目前,蔡林濤團隊已經開始研究通過生物內驅動增強微納生物機器人的功效。除趨磁細菌外,團隊也在嘗試用酵母菌、人體益生菌等物質,同時通過酶催化體系和化學催化體系,完成微納機器人的內驅動,讓藥物顆粒穿過復雜的人體屏障直達病灶。
從人體自身尋找微納機器人的內生能源在安全性上更進一步,通過酶催化形成一個氣體模式,這個氣體就像推進器一樣,帶著微納機器人去制定區域。
“生物內驅動的微納機器人就如同一個帶有 GPS 導航的深水炸彈,只會去指定的地方爆炸,不會對其他地方造成損害。” 蔡林濤說。
他坦言,通過生物內驅動的 AI 微納機器人有望在未來 3-5 年內完成臨床試驗,隨后會被推廣使用在腫瘤治療當中。
納米醫療的 “魔幻” 未來
與 “吞下外科醫生” 的幻想相同,蔡林濤對微納機器人在醫療上的應用也有著 “硬核” 幻想。
蔡林濤直言,研究納米醫療的終極目標是要打造一個 “健康倉” 的概念,通過光學和磁場控制,讓病人無需手術就能把病治好。
傳統的分子靶點治療腫瘤、心血管等疾病的方式,相當于強制性破壞身體內的內生環境,會造成如炎癥、感染等副作用。
健康倉的治療理念是通過內在內生生物和外在磁場和激光控制,其能根據人體實際情況進行全自動化的針對性治療。
“人只需要躺在健康倉里,不會有任何疼痛感知,甚至只是睡一覺,你的病就被治好了。” 蔡林濤說。
想要實現這樣的終極目標,除了理論基礎,也離不開多學科的知識融合。蔡林濤認為未來的醫療技術是一個綜合學科的整合過程,如果想要實現理想的健康倉,需要生物人才、材料學人才、化學人才、物理人才等等專業的技術人員一起,共同討論出一個可行的方案。
自 2008 年以來,蔡林濤加入中國科學院深圳先進技術研究院校研究納米醫療技術至今已經 12 年。他所研究的 “以癌治癌” 同源靶向仿生納米載藥體系、光敏 GPS 癌細胞追蹤系統等納米技術治療腫瘤方案,被 ACS nano、Advanced Function Materials、Advanced Science 等學術期刊轉載。
研究之路任重而道遠,但蔡林濤團隊對未來納米醫療的發展很有信心。他預言,“納米醫療雖然研究的是一個微觀的體系,但未來的納米醫療研究會像 Google X 實驗室一樣,把很多學科交叉在一起,做一些以前不敢想象的事情。”
-End-
原文標題:吞下“外科醫生”?中科院研發微納生物機器人,自主游向腫瘤病灶,實現主動靶向癌癥治療
文章出處:【微信公眾號:DeepTech深科技】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
機器人
+關注
關注
213文章
29667瀏覽量
212523 -
AI
+關注
關注
88文章
34936瀏覽量
278341 -
人工智能
+關注
關注
1806文章
48971瀏覽量
248693
原文標題:吞下“外科醫生”?中科院研發微納生物機器人,自主游向腫瘤病灶,實現主動靶向癌癥治療
文章出處:【微信號:deeptechchina,微信公眾號:deeptechchina】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
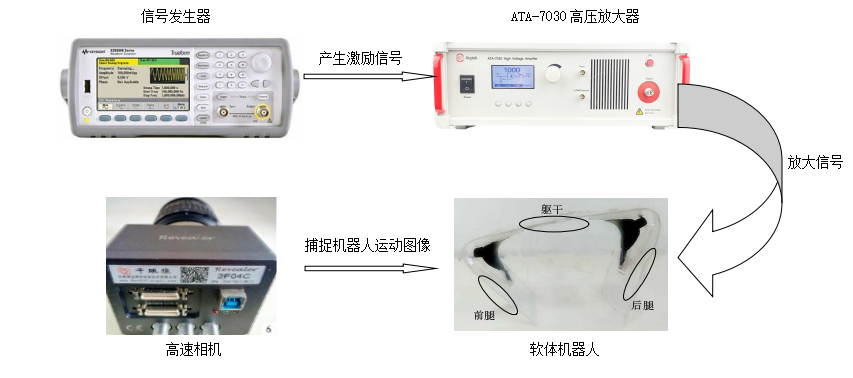
安泰高壓放大器在微納機器人研究中的應用介紹
中國成功研發蚊子大小仿生機器人
納芯微磁傳感器技術推動人形機器人性能提升

飛利信與睿爾曼機器人、中科測源簽署三方戰略合作協議發力機器人產學研新模式

盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
佛山智能裝備院與華數機器人在具身智能工業機器人領域的研究成果

從控制到感知,一文讀懂納芯微的人形機器人布局(下篇)

從控制到感知,一文讀懂納芯微的人形機器人布局(上篇)

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
基于漩渦湍流輔助的微流控平臺,可實現類精子結構的微型機器人一步成型

柔性機器人與剛性機器人區別與聯系






 工商網監
工商網監
評論