") 無(wú)人駕駛汽車的核心是感知能力
無(wú)人駕駛汽車的核心是感知能力

無(wú)人駕駛汽車
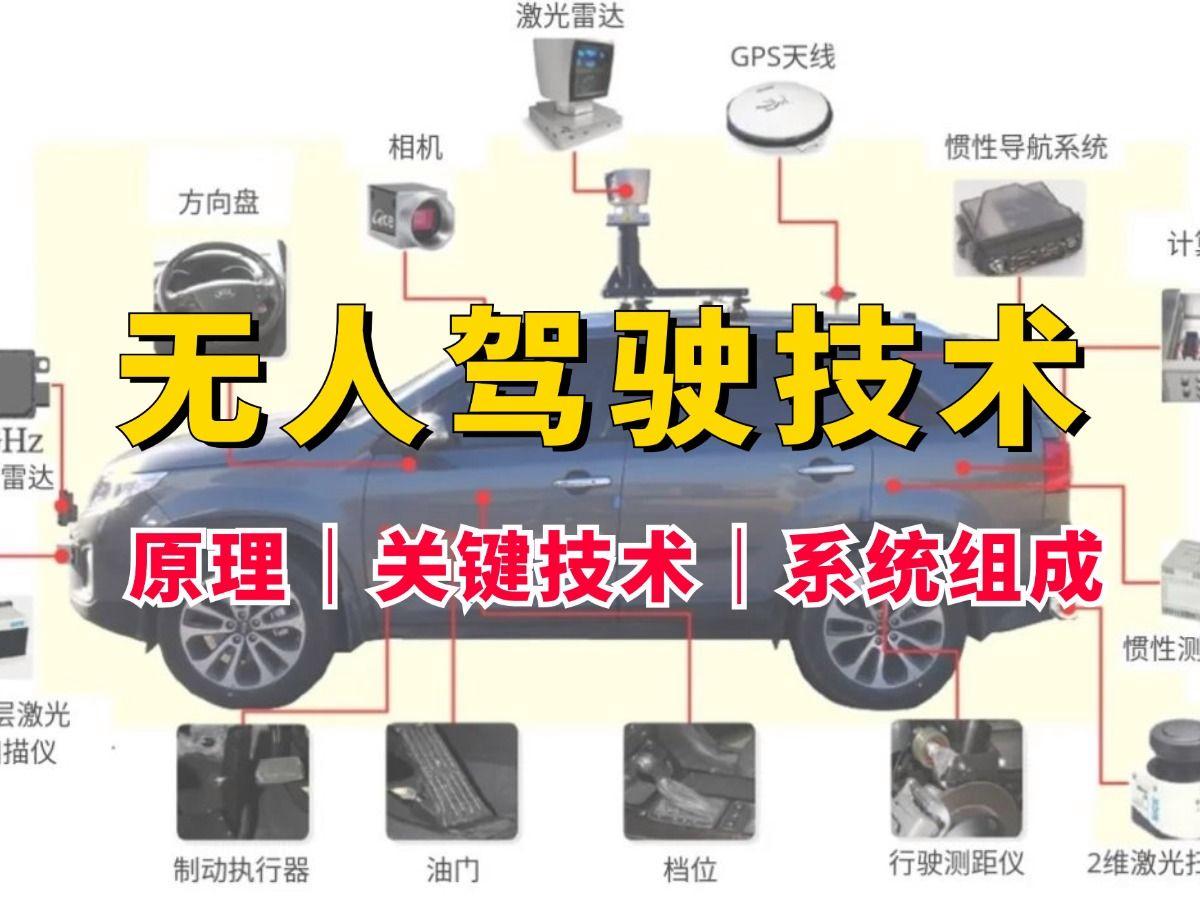
無(wú)人駕駛汽車,又稱自動(dòng)駕駛汽車或輪式移動(dòng)機(jī)器人,是一種運(yùn)輸動(dòng)力的無(wú)人地面載具。我們理想的無(wú)人駕駛汽車是無(wú)需人類操作即能從地點(diǎn)A行駛到地點(diǎn)B,不管途中環(huán)境多復(fù)雜天氣多惡劣都由機(jī)器自己完成。無(wú)人駕駛汽車的核心在于無(wú)人駕駛技術(shù),如果說(shuō)汽車工業(yè)是制造業(yè)的皇冠,那么無(wú)人駕駛技術(shù)就是皇冠上的明珠。
無(wú)人駕駛汽車需要多門(mén)技術(shù)整合才能實(shí)現(xiàn),它并非是一項(xiàng)單一的新技術(shù),其中包括雷達(dá)、激光雷達(dá)、攝像頭、GPS、計(jì)算機(jī)視覺(jué)、決策系統(tǒng)、操作系統(tǒng)、高精地圖、實(shí)時(shí)定位、機(jī)械控制、能耗散熱管理等等。盡管無(wú)人駕駛汽車看起來(lái)很科幻,但實(shí)際上夢(mèng)想正在照進(jìn)現(xiàn)實(shí)。
無(wú)人駕駛
無(wú)人駕駛分級(jí)
針對(duì)無(wú)人駕駛汽車自動(dòng)化的程度一般可以分為6個(gè)級(jí)別,按照自動(dòng)化程度從低到高順序分別為L(zhǎng)evel 0 到Level 5。
Level 0:無(wú)任何自動(dòng)化駕駛功能,行駛過(guò)程完全依靠人類司機(jī)控制汽車,包括汽車啟動(dòng)、行駛過(guò)程中的各種環(huán)境狀況的觀察、各種操作決策等等。簡(jiǎn)單來(lái)說(shuō),需要人類控制駕駛的汽車都屬于這個(gè)級(jí)別。
Level 1:?jiǎn)我还δ茏詣?dòng)化,行駛過(guò)程中將部分控制權(quán)交給機(jī)器管理,但是司機(jī)仍然需要把控整體。比如自適應(yīng)巡航、應(yīng)急剎車輔助、車道保持等等。司機(jī)手腳不能同時(shí)脫離控制系統(tǒng)。
Level 2:部分自動(dòng)化,行駛過(guò)程中司機(jī)和汽車共享汽車控制權(quán),在某些預(yù)設(shè)環(huán)境下司機(jī)能夠完全脫離控制系統(tǒng),但司機(jī)需要隨時(shí)待命,且需要在短時(shí)間內(nèi)接管汽車。
Level 3:有條件自動(dòng)化,在有限情況下實(shí)現(xiàn)自動(dòng)行駛。比如在高速路上機(jī)器完全負(fù)責(zé)整個(gè)汽車的操控,司機(jī)可以完全完全脫離控制系統(tǒng),司機(jī)需要隨時(shí)待命,但有足夠的預(yù)警時(shí)間。
Level 4:高度自動(dòng)化,在特定道路限定下行駛過(guò)程中無(wú)需司機(jī)介入。司機(jī)僅需要設(shè)置好起點(diǎn)和終點(diǎn)即可,剩下的交由汽車自行控制。
Level 5:完全自動(dòng)化,在任何環(huán)境中行駛都無(wú)需司機(jī)介入。司機(jī)僅需要設(shè)置好起點(diǎn)和終點(diǎn)即可,剩下的交由汽車自行控制。
無(wú)線雷達(dá)
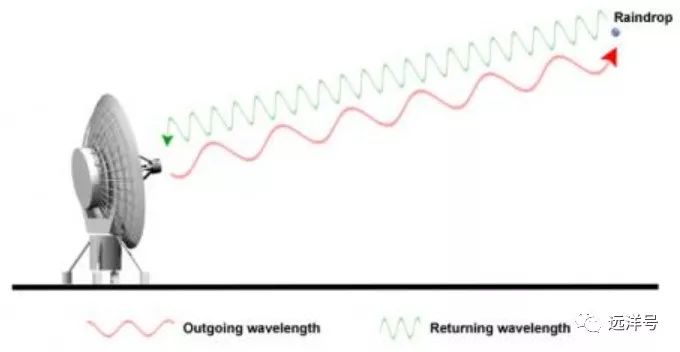
無(wú)線雷達(dá)(Radio Detection and Ranging)是汽車上很常見(jiàn)的組件,它的工作原理是發(fā)射出無(wú)線電波后經(jīng)過(guò)遠(yuǎn)處物體將無(wú)線電波反射回來(lái)從而達(dá)到探測(cè)效果。通過(guò)無(wú)線雷達(dá)能夠獲得物體的數(shù)量、大小、運(yùn)動(dòng)速度、運(yùn)動(dòng)方向等等信息,在無(wú)人駕駛領(lǐng)域它經(jīng)常被用于自適應(yīng)巡航和自動(dòng)緊急制動(dòng)場(chǎng)景。
雷達(dá)
雷達(dá)向目標(biāo)區(qū)域發(fā)出無(wú)線電波,某個(gè)物體將無(wú)線電波反射回來(lái),便能夠計(jì)算兩者之間的距離。距離d=c?t/2,其中t為從無(wú)線電波發(fā)射到反射回來(lái)的時(shí)間間隔,c為光速(3?10的八次方米每秒)。
雷達(dá)可用來(lái)識(shí)別數(shù)百碼之外的物體,并且能夠檢測(cè)它的大小及運(yùn)動(dòng)速度。但它不能夠捕獲到物體的細(xì)節(jié)。
激光雷達(dá)
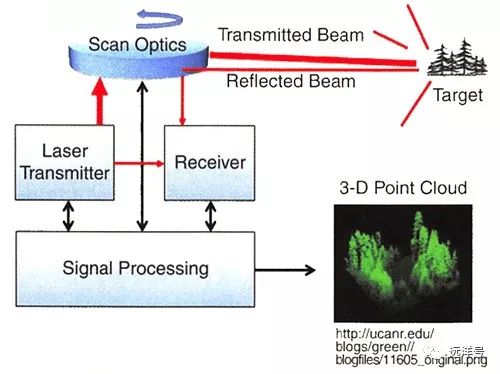
激光雷達(dá)LiDAR(Light Detection and Ranging),即激光探測(cè)及測(cè)距系統(tǒng),是以發(fā)射激光束來(lái)探測(cè)物體的雷達(dá)系統(tǒng)。其工作原理是向目標(biāo)物體發(fā)射大量激光束探測(cè)信號(hào),然后接收器處理目標(biāo)反射回來(lái)的信號(hào)即可獲得目標(biāo)的有關(guān)信息,比如目標(biāo)的距離、方位、高度、速度、姿態(tài)、甚至形狀等信息。無(wú)人駕駛汽車的激光雷達(dá)一般都安裝在車頂上,不斷地高速旋轉(zhuǎn)對(duì)周圍環(huán)境進(jìn)行掃描,通過(guò)它能夠得到周圍物體的三維信息。
激光雷達(dá)
激光雷達(dá)
激光雷達(dá)的測(cè)量原理相對(duì)比較簡(jiǎn)單,比如下圖中車上的激光雷達(dá)向目標(biāo)物體發(fā)出一束激光,就可以通過(guò)光速來(lái)計(jì)算距離了,而加上光束的角度后則能得到更多指標(biāo)。
對(duì)于實(shí)際立體物體,通過(guò)激光雷達(dá)對(duì)整個(gè)物體掃描就能夠形成3D點(diǎn)云。激光雷達(dá)對(duì)目標(biāo)發(fā)射出多個(gè)光束,接收器接收反射回來(lái)的光束后對(duì)信號(hào)進(jìn)行處理,從而形成3D點(diǎn)云。
3D激光雷達(dá)
激光雷達(dá)提供了比無(wú)線雷達(dá)更高分辨率的解決方案,能比無(wú)線雷達(dá)捕獲更多信息。激光雷達(dá)造價(jià)貴,運(yùn)行時(shí)需要不停旋轉(zhuǎn),同時(shí)它無(wú)法在多霧多塵的天氣工作。
攝像頭
為了捕獲更多的圖像細(xì)節(jié),我們需要在無(wú)人駕駛汽車上增加攝像頭,比如要識(shí)別公路上的路標(biāo)。攝像頭能夠得到無(wú)人駕駛汽車周圍最準(zhǔn)確的視圖,提供了最高分別率圖像。攝像頭受天氣影響很大,比如晚上攝像頭就影響很大。
對(duì)于捕獲到的圖像,要識(shí)別里面的物體就需要機(jī)器學(xué)習(xí)來(lái)加持。而目前流行的圖像識(shí)別使用的都是深度學(xué)習(xí),核心就是卷積神經(jīng)網(wǎng)絡(luò)。前面的神經(jīng)網(wǎng)絡(luò)工作原理章節(jié)和深度學(xué)習(xí)原理章節(jié)已經(jīng)講解了相關(guān)的原理,所以通過(guò)深度卷積神經(jīng)網(wǎng)絡(luò)是對(duì)攝像頭收集的圖像進(jìn)行處理的核心。
無(wú)人車經(jīng)過(guò)攝像頭捕獲的鏡頭通過(guò)深度學(xué)習(xí)能夠識(shí)別出圖像中包含的物體,比如行人、行車、交通路標(biāo)等等。對(duì)應(yīng)計(jì)算機(jī)視覺(jué)的物體檢測(cè)與物體分類任務(wù),經(jīng)典的算法包括R-CNN、Faster R-CNN、SSD、YOLO等等。
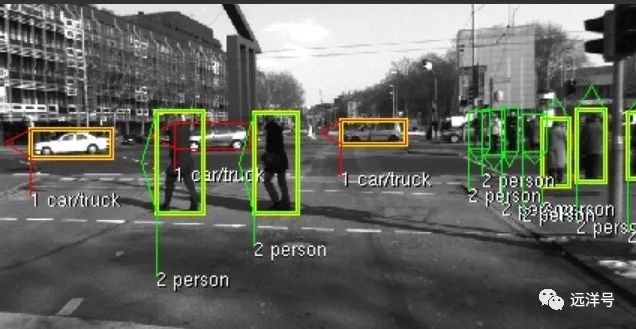
物體檢測(cè)
超聲波雷達(dá)
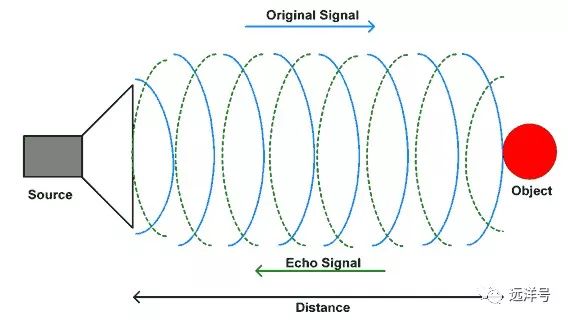
除了以上傳感器外,無(wú)人駕駛汽車一般還會(huì)安裝有超聲波雷達(dá)。超聲波雷達(dá)又稱倒車?yán)走_(dá),很明顯它主要是為倒車做輔助的。它的工作原理是通過(guò)超聲波發(fā)射裝置向外發(fā)射超聲波,然后通過(guò)接收器接收反彈回來(lái)的超聲波,根據(jù)時(shí)間差來(lái)計(jì)算距離。距離d=343?時(shí)間/2,其中343位聲波速度,343m/s。超聲波雷達(dá)的探測(cè)范圍一般在幾米以內(nèi),探測(cè)精度較高,適合用于泊車。
超聲波雷達(dá)
GPS
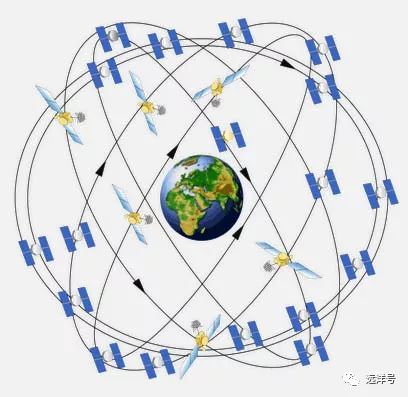
GPS是最常用的定位技術(shù),在無(wú)人駕駛汽車中會(huì)通過(guò)其進(jìn)行定位。GPS的更新頻率為10Hz,所以它缺乏實(shí)時(shí)性。此外,GPS民用版的誤差能達(dá)到好幾米,所以完全靠GPS進(jìn)行定位導(dǎo)航非常容易導(dǎo)致交通事故。
GPS
GPS的定位使用了三邊測(cè)量法,衛(wèi)星與接收裝置之間的距離通過(guò)傳輸時(shí)間來(lái)測(cè)量距離,然后通過(guò)多顆衛(wèi)星的位置便能夠計(jì)算接收裝置的位置,GPS一般會(huì)使用4顆以上的衛(wèi)星來(lái)定位接受裝置的3D位置信息。
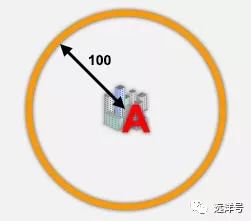
下面通過(guò)一個(gè)例子來(lái)理解2D的三邊測(cè)量法,比如你的位置與A衛(wèi)星的距離為100km,則你可能的位置是在以A衛(wèi)星為中心的一個(gè)圓上。
接著你又向另外一個(gè)衛(wèi)星B發(fā)出無(wú)線信號(hào),測(cè)量的距離時(shí)75km,則此時(shí)你的位置有兩種可能,就是兩個(gè)圓的相交點(diǎn)。
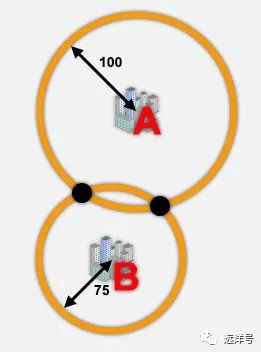
最后向衛(wèi)星C發(fā)出無(wú)線信號(hào),測(cè)量得出的距離為200km,此時(shí)三個(gè)圓的相交點(diǎn)就能唯一定位一個(gè)位置,這個(gè)位置即是你的位置。也就是說(shuō)三個(gè)衛(wèi)星就能確定一個(gè)平面上的點(diǎn),只要坐標(biāo)系建立起來(lái)便能得到詳細(xì)的xy值。
高精地圖
高精地圖是無(wú)人駕駛汽車重要的支撐,它包含了大量的行車輔助信息,除了能提供精確的定位外,它還能做智能避讓、智能調(diào)速等等。高精地圖能為無(wú)人車提供靜態(tài)的感知能力,為無(wú)人車提供全局視野,比如道路、交通、基礎(chǔ)設(shè)施等信息。
我們現(xiàn)在日常使用的電子地圖為傳統(tǒng)電子地圖,它能用于查詢地點(diǎn)和導(dǎo)航,主要面向人類駕駛員。而高精電子地圖則能提供比傳統(tǒng)電子地圖更多的信息,主要面向無(wú)人車。無(wú)人車車身上的傳感器能收集到的主要信息范圍都非常有限,而通過(guò)高精電子地圖則能夠?qū)o(wú)人車的感知能力范圍大大延伸,而且能夠得到更多準(zhǔn)確的信息。
高精地圖
高精地圖包含了很多輔助信息。比如包括車道的位置、寬度、斜度、類型、曲率等等公路數(shù)據(jù)信息。比如包括交通標(biāo)識(shí)、信號(hào)燈、障礙物、道路限高、防護(hù)欄、樹(shù)、圍欄、地標(biāo)等等環(huán)境數(shù)據(jù)信息。如果進(jìn)一步對(duì)高精電子地圖的模型進(jìn)行抽象,則可以得到更多無(wú)人車與車道、交通、基礎(chǔ)設(shè)施之間的信息。
相比于GPS,高精電子地圖能夠?qū)崿F(xiàn)比GPS高10倍以上的精度,GPS精度一般在幾米,而高精地圖與傳感器協(xié)作則能使精度達(dá)到厘米級(jí)別。
慣性測(cè)量裝置
慣性測(cè)量裝置(IMU)是一種測(cè)量加速度與角速度的傳感器。無(wú)人車一般使用的是中低級(jí)慣性傳感器,更新頻率為1kHz,價(jià)格為幾千塊。慣性能協(xié)助無(wú)人車進(jìn)行定位,但因?yàn)樗恼`差會(huì)隨著時(shí)間而累積,所以只能用于很短時(shí)間內(nèi)的定位。
為了方便理解慣性測(cè)量裝置的加速度,我們可以將加速度計(jì)想象成一個(gè)箱子里面懸浮著一個(gè)球,它們處于無(wú)重力的太空中。當(dāng)我們向左邊施加一個(gè)重力加速度(1g)時(shí),球會(huì)向X-方向的壁平面產(chǎn)生1g的壓力,然后我們就能夠測(cè)量到x軸上的加速度為-1g。
慣性測(cè)量裝置還包含了角速度測(cè)量功能,陀螺可以繞著支點(diǎn)進(jìn)行三個(gè)自由度的轉(zhuǎn)動(dòng)。如下面的陀螺儀中間有一根豎軸穿過(guò)一個(gè)金屬圓盤(pán),圓盤(pán)稱為轉(zhuǎn)子,豎軸為旋轉(zhuǎn)軸。為了增加慣性,轉(zhuǎn)子用質(zhì)量大的金屬制成。豎軸外側(cè)由三層不同大小的圓環(huán)嵌套而成,擁有三個(gè)方向自由度。角速度的測(cè)量則主要是利用角動(dòng)量守恒定理。
陀螺儀
V2X與環(huán)境交互
V2X通信傳感是無(wú)人車與周圍環(huán)境的通信協(xié)議,包括車與車通信(Vehicle to Vehicle,V2V)、車與基礎(chǔ)設(shè)施通信(Vehicle to Infrastructure,V2I)、車與行人通信(Vehicle to Pedestrian,V2P)。
V2V通信指無(wú)人駕駛汽車之間進(jìn)行信息交換,比如無(wú)人駕駛車之間交換交通狀況。V2I通信指無(wú)人駕駛汽車與基礎(chǔ)設(shè)施之間進(jìn)行信息交換,比如智能停車場(chǎng)與無(wú)人駕駛汽車的通信。V2P通信指無(wú)人駕駛汽車與行人之間進(jìn)行信息交換,比如通過(guò)智能手機(jī)應(yīng)用與無(wú)人駕駛汽車通信。
路徑規(guī)劃
路徑規(guī)劃主要解決的問(wèn)題是找到一條最快最安全的從起點(diǎn)到終點(diǎn)的路徑,路徑規(guī)劃中有很多成熟的算法,比如Dijkstra算法、A*算法、RRT算法等等。無(wú)人駕駛汽車的路徑規(guī)劃需要考慮多因素的影響,比如車禍路道、交通擁堵等。
路徑規(guī)劃
總結(jié)
無(wú)人駕駛汽車的核心是感知能力,無(wú)人車有四種不同視野的眼睛,包括無(wú)線雷達(dá)、激光雷達(dá)、超聲波雷達(dá)和攝像頭,通過(guò)它們能得到不同的視野。在定位方面無(wú)人駕駛汽車使用GPS與慣性策略裝置,再加上高精電子地圖就能夠?qū)崿F(xiàn)非常精準(zhǔn)的定位。此外,為了能讓無(wú)人車與環(huán)境進(jìn)行通信交互,V2X被提出來(lái),包括V2V、V2I、V2P。
14-30
來(lái)源:遠(yuǎn)洋號(hào),作者:wj seaboat
原文鏈接:https://mp.weixin.qq.com/s/VAchQR-8q0bAMYg6SEAF1A
轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。
審核編輯:何安
-
無(wú)人駕駛
+關(guān)注
關(guān)注
99文章
4169瀏覽量
123326
發(fā)布評(píng)論請(qǐng)先 登錄

什么是低速無(wú)人駕駛,讓你一分鐘秒懂 #無(wú)人駕駛 #5g無(wú)人駕駛 #低速無(wú)人駕駛
無(wú)人駕駛技術(shù)未來(lái)在哪里?低速才是突破口

智行者無(wú)人駕駛技術(shù)助力應(yīng)急救援智能化升級(jí)
無(wú)人駕駛解決方案包含哪些方面?感知、決策與控制
易控智駕發(fā)布礦山無(wú)人駕駛應(yīng)用落地成果
為什么聊自動(dòng)駕駛的越來(lái)越多,聊無(wú)人駕駛的越來(lái)越少?

測(cè)速雷達(dá)與無(wú)人駕駛技術(shù)的結(jié)合 測(cè)速雷達(dá)故障排除技巧
一桿有AI的路燈:感知環(huán)境監(jiān)測(cè)路況還能“對(duì)話”無(wú)人駕駛AI燈桿屏

UWB模塊如何助力無(wú)人駕駛技術(shù)
特斯拉推出無(wú)人駕駛Model Y
Nullmax視覺(jué)感知能力再獲國(guó)際頂級(jí)學(xué)術(shù)會(huì)議認(rèn)可
文遠(yuǎn)知行獲加州無(wú)人駕駛汽車載人測(cè)試許可
馬斯克稱:通用因技術(shù)未成熟放棄無(wú)人駕駛
5G賦能車聯(lián)網(wǎng),無(wú)人駕駛引領(lǐng)未來(lái)出行






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論