") 基于智能脈沖寬度調(diào)制技術(shù)實(shí)現(xiàn)列車制動(dòng)系統(tǒng)的設(shè)計(jì)
基于智能脈沖寬度調(diào)制技術(shù)實(shí)現(xiàn)列車制動(dòng)系統(tǒng)的設(shè)計(jì)

作者:黃志武,周立林,劉劍鋒,桂衛(wèi)華
1 引 言
隨著我國(guó)國(guó)民經(jīng)濟(jì)的蓬勃發(fā)展和人民生活水平的日益提高,鐵路的客、貨運(yùn)量將越來(lái)越大,列車牽引重量與運(yùn)行速度將不斷提高。高速客運(yùn)及重載貨運(yùn)列車的發(fā)展對(duì)列車制動(dòng)系統(tǒng)提出了更高更新的要求。
國(guó)外發(fā)達(dá)國(guó)家都是采用微機(jī)應(yīng)用先進(jìn)控制理論實(shí)現(xiàn)對(duì)機(jī)車制動(dòng)氣缸的精確控制。而在我國(guó)機(jī)車上廣泛使用的DK-l和JZ-7型制動(dòng)機(jī)只能對(duì)機(jī)車實(shí)現(xiàn)一些簡(jiǎn)單的邏輯控制功能,不能實(shí)現(xiàn)對(duì)機(jī)車制動(dòng)缸和均衡風(fēng)缸的閉環(huán)控制,難以滿足機(jī)車制動(dòng)控制的需要。隨著電子技術(shù)及微機(jī)控制技術(shù)應(yīng)用的日漸成熟,有必要應(yīng)用現(xiàn)代電子技術(shù)和先進(jìn)的控制理論,利用微機(jī)的強(qiáng)大功能實(shí)現(xiàn)對(duì)機(jī)車的精確制動(dòng)。 目前世界各國(guó)鐵路絕大多數(shù)仍采用空氣制動(dòng),要實(shí)現(xiàn)對(duì)氣體壓力的控制,特別是小流量壓力控制,就應(yīng)考慮明顯的非線性和不確定性。另外,負(fù)載的不確定性導(dǎo)致了整個(gè)系統(tǒng)模型的不確定,經(jīng)典的控制方法及依賴于具體數(shù)學(xué)模型的現(xiàn)代控制理論都難以實(shí)現(xiàn)系統(tǒng)控制的要求,在這種情況下,將智能控制方法和常規(guī)控制方法相結(jié)合有望取得更好的控制效果。
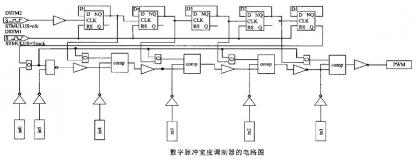
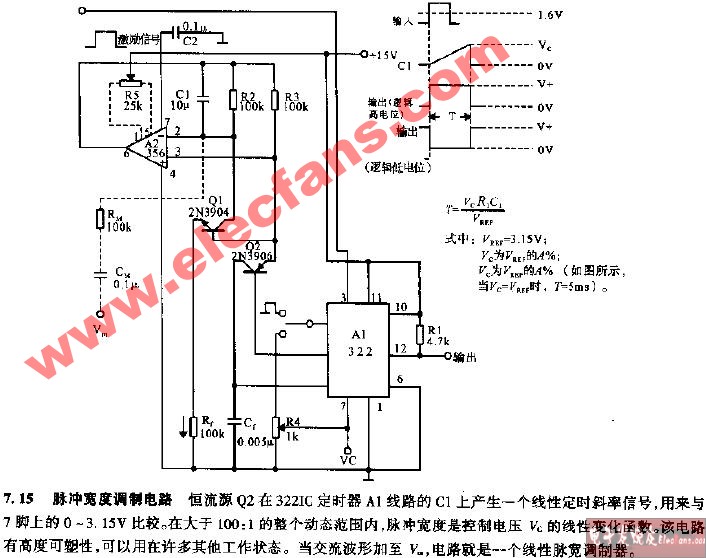
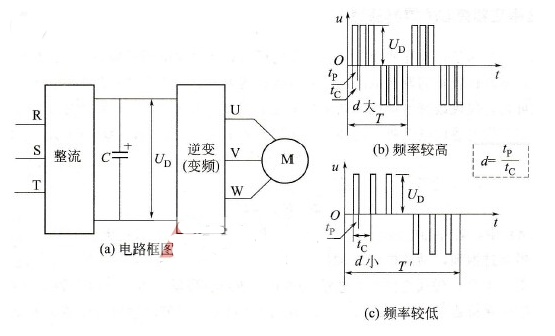
本文介紹了一種基于智能脈沖寬度調(diào)制(Pulse WidthModulation,PWM)控制的機(jī)車制動(dòng)控制單元的設(shè)計(jì)和實(shí)現(xiàn)方法。對(duì)制動(dòng)機(jī)氣缸的高速電控閥實(shí)王見(jiàn)PWM控制,也就是通過(guò)調(diào)節(jié)信號(hào)的占空比米實(shí)現(xiàn)對(duì)高速電控閥一定周期內(nèi)開(kāi)閉時(shí)間的控制。
通過(guò)建立機(jī)車制動(dòng)機(jī)氣缸模糊控制規(guī)則,運(yùn)用模糊推理來(lái)實(shí)現(xiàn)PID控制,從而實(shí)現(xiàn)了機(jī)車的精確制動(dòng)。這樣就有效解決了目前我國(guó)的DK-1和JZ-7型制動(dòng)機(jī)不能實(shí)現(xiàn)精確制動(dòng)的問(wèn)題,對(duì)提高我國(guó)機(jī)車的安全運(yùn)行和信息化程度有著極大的促進(jìn)作用。
2 系統(tǒng)硬件結(jié)構(gòu)
機(jī)車制動(dòng)控制單元(Brake Control Unit,BCU)主要分為以下幾個(gè)部分:模擬量輸入、模擬量輸出、數(shù)字量輸入、數(shù)字量輸出、PWM輸出、微處理器部分以及與外圍部分的通信等,系統(tǒng)整體結(jié)構(gòu)圖如圖1所示。
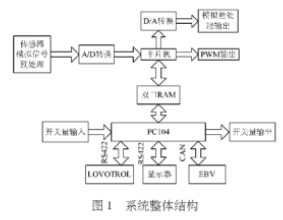
其中模擬量輸入部分主要是包括傳感器模擬信號(hào)預(yù)處理和A/D轉(zhuǎn)換,信號(hào)預(yù)處理主要是將從傳感器上獲得的4~20 mA電流信號(hào)轉(zhuǎn)換為A/D轉(zhuǎn)換所需要的電壓信號(hào)。通過(guò)處理,我們就可以得到氣缸壓力,A/D轉(zhuǎn)換的精度直接關(guān)系到氣缸壓力控制的精度。為了滿足控制的需要,在本系統(tǒng)中選用了16位的A/D轉(zhuǎn)換芯片,采樣實(shí)驗(yàn)表明,采樣值偏差很小,在允許的誤差范圍內(nèi)。
微機(jī)處理部分實(shí)際上包含了2個(gè)微處理器,一個(gè)是單片機(jī),另外一個(gè)是PC104。他們實(shí)現(xiàn)不同的功能,他們之間通過(guò)雙口RAM實(shí)現(xiàn)高速數(shù)據(jù)通信。單片機(jī)主要是實(shí)現(xiàn)對(duì)模擬量A/D轉(zhuǎn)換控制、D/A轉(zhuǎn)換控制以及智能PWM控制等。由于PC104功能強(qiáng)大,能夠?qū)崿F(xiàn)更強(qiáng)大的數(shù)據(jù)處理功能。PC104主要是將獲得的數(shù)字輸入量通過(guò)數(shù)據(jù)處理后輸出數(shù)字量。另外,通過(guò)PC104快速數(shù)據(jù)處理和軟件的強(qiáng)大功能還使制動(dòng)控制單元具有機(jī)車制動(dòng)機(jī)監(jiān)控及故障檢測(cè)、診斷、顯示、告警、記錄、單機(jī)自動(dòng)測(cè)試等功能。在本系統(tǒng)中,實(shí)現(xiàn)對(duì)氣缸壓力的精確控制是由單片機(jī)來(lái)完成的,PC104通過(guò)對(duì)各種信號(hào)如模擬量、數(shù)字量等信號(hào)的處理得到需要?dú)飧姿枰_(dá)到的壓力值,單片機(jī)通過(guò)雙口RAM得到壓力值,應(yīng)用智能PWM控制實(shí)現(xiàn)對(duì)壓力的精確控制,這一部分將在下面章節(jié)進(jìn)行詳細(xì)介紹。
3 分段控制
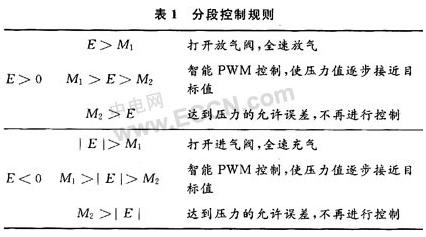
為了實(shí)現(xiàn)對(duì)機(jī)車制動(dòng)機(jī)氣缸既能精確控制,又能夠快速達(dá)到目標(biāo)值,我們對(duì)氣缸壓力實(shí)行分段控制。單片機(jī)有4路開(kāi)關(guān)量輸出,分別對(duì)應(yīng)制動(dòng)缸的進(jìn)氣閥、放氣閥和均衡風(fēng)缸的進(jìn)氣閥、放氣閥,輸出1代表打開(kāi)閥門(mén),0代表關(guān)閉閥門(mén)。我們以pt表示壓力目標(biāo)值,pi表示當(dāng)前氣缸壓力值,E表示偏差值。所以,有E=pi-pt。M1,M2表示壓力偏差的絕對(duì)值,其中M1》M2,M1表示在接近目標(biāo)值的一個(gè)值,M2表示允許的最大誤差,分段控制規(guī)則如表1所示。
4 智能PWM控制
4.1 智能PID介紹
PID控制是較早發(fā)展起來(lái)的控制策略之一,由于算法簡(jiǎn)單、魯棒性好、可靠性高而廣泛用于過(guò)程控制和運(yùn)動(dòng)控制中,尤其適用于能建立精確數(shù)學(xué)模型的控制系統(tǒng)。但由于實(shí)際工業(yè)生產(chǎn)過(guò)程往往是非線性和時(shí)變不確定性的,難以建立精確的數(shù)學(xué)模型,因此常規(guī)PID控制器很難達(dá)到理想控制效果。
近年來(lái),智能控制無(wú)論是理論上還是技術(shù)應(yīng)用上均得到了長(zhǎng)足的發(fā)展,隨之不斷涌現(xiàn)將智能控制方法和常規(guī)PID控制方法融合在一起的新方法,形成了許多智能PID控制器。這些智能控制器不僅具備自學(xué)習(xí)、自適應(yīng)、自組織的能力,而且還有常規(guī)PID控制器結(jié)構(gòu)簡(jiǎn)單、魯棒性強(qiáng)、可靠性高、為現(xiàn)場(chǎng)工程設(shè)計(jì)人員所熟悉等特點(diǎn)。目前主要有4種智能PID控制:基于專家智能PID控制、基于模糊推理的PID控制、基于神經(jīng)網(wǎng)絡(luò)的PID控制、基于遺傳算法的PID控制。
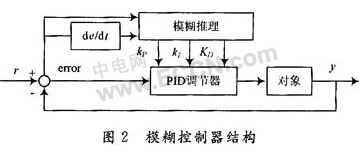
在本系統(tǒng)中,采用基于模糊推理的PID控制來(lái)實(shí)現(xiàn)對(duì)機(jī)車制動(dòng)氣缸壓力的精確控制。基于模糊推理的PID控制就是運(yùn)用Fuzzy Sets理論和方法將操作人員或者專家的整定經(jīng)驗(yàn)和技術(shù)知識(shí)總結(jié)成為Fuzzy規(guī)則模型,形成微機(jī)的查詢表格及解析式,根據(jù)系統(tǒng)的實(shí)際響應(yīng)情況,運(yùn)用模糊推理來(lái)實(shí)現(xiàn)PID控制。在PID控制算法基礎(chǔ)上增加求采樣時(shí)刻的偏差E和偏差變化率Ec,參數(shù)的Fuzzy自校正思想是根據(jù)被控對(duì)象的響應(yīng)在采樣時(shí)刻的E和Ec來(lái)確定kP,k1,kD三參數(shù)修正的方向和大小。其算法過(guò)程是利用對(duì)應(yīng)的規(guī)則集將控制指標(biāo)模糊化,然后利用他與知識(shí)庫(kù)中的模糊規(guī)則進(jìn)行匹配,如有規(guī)則被匹配,則執(zhí)行該規(guī)則的結(jié)果部分,就可以得到相應(yīng)的參數(shù)修正值。其結(jié)構(gòu)圖如圖2所示。
4.2 模糊PID控制器設(shè)計(jì)
控制系統(tǒng)的PID算法是根據(jù)壓力目標(biāo)值與實(shí)際值之差的比例值、積分值、微分值來(lái)確定控制量的大小。其算式為:

式中,e(t),e(t-1)分別為第t次及第t-1次采樣偏差值;pout(t)為第t次的控制量輸出值;kP,kI,kD分別為比例系數(shù)、積分系數(shù)和微分系數(shù)。合適的kP,kI,kD參數(shù)直接關(guān)系到控制的精度。
根據(jù)模糊數(shù)學(xué)的理論和方法,將在現(xiàn)場(chǎng)獲得的調(diào)試經(jīng)驗(yàn)和技術(shù)知識(shí)總結(jié)成為IF(條件)、THEN(結(jié)果)形式的模糊推理規(guī)則,并把這些模糊規(guī)則及相關(guān)信息(如初始的PID參數(shù))存入計(jì)算機(jī)。根據(jù)檢測(cè)回路的響應(yīng)情況,計(jì)算出采樣時(shí)刻的偏差E和變化率Ec,運(yùn)用模糊推理,進(jìn)行模糊運(yùn)算,即可得到該時(shí)刻的kP,kI,kD,實(shí)現(xiàn)對(duì)PID參數(shù)的最佳調(diào)整。
Fuzzy-PID就是根據(jù)現(xiàn)場(chǎng)調(diào)試得到在PID參數(shù)預(yù)整定值k′P,k′I,k′D,再利用模糊規(guī)則實(shí)時(shí)在線整定PID控制器的三個(gè)修正參數(shù)△kP,△kI和△kD,實(shí)現(xiàn)對(duì)壓力的優(yōu)化控制。模糊控制器的輸入、輸出變量都是精確量,模糊推理是針對(duì)模糊量進(jìn)行的,因此控制器首先要對(duì)輸入量進(jìn)行模糊化處理。在所設(shè)計(jì)的Fuzzy-PID控制器中,輸入、輸出變量的語(yǔ)言值均分為7個(gè)語(yǔ)言值:{NB,NM,NS,0,PS,PM,PB},他們分別代表負(fù)大、負(fù)中、負(fù)小、零、正小、正中和正大。隸屬度函數(shù)采用靈敏性強(qiáng)的三角函數(shù),如圖3所示。
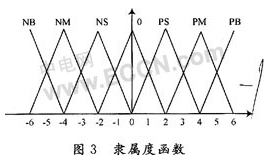
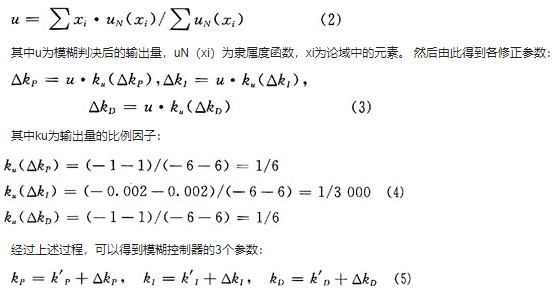
偏差E的基本論域?yàn)椋?5 kPa,+5 kPa],偏差變化率Ec的基本論域?yàn)椋?0.5,+0.5],△kP的基本論域?yàn)椋?1,1];△kI的基本論域?yàn)椋?0.002,0.002];△kD的基本論域?yàn)椋?1,1]。以上各變量的模糊量分別為E,Ec,△kP,△kI和△kD,其論域均為[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6]。輸入量E,Ec的量化因子為:ke=1.2,kec=12。
總結(jié)工程設(shè)計(jì)人員的技術(shù)知識(shí)和實(shí)際操作經(jīng)驗(yàn),得到了針對(duì)kP,kI,kD三個(gè)參數(shù)分別整定的模糊控制表,見(jiàn)表2、表3和表4。
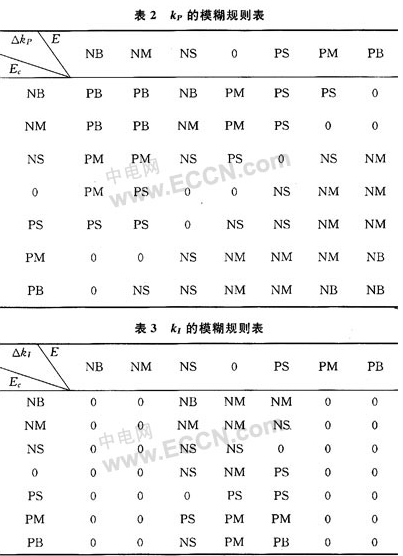

在本系統(tǒng)中,根據(jù)偏差E和偏差變化率Ec,取得相應(yīng)的語(yǔ)言值,根據(jù)表1~表3的整定規(guī)則表,經(jīng)過(guò)公式法模糊決策,分別得到3個(gè)修正參數(shù)△kP,△kI,△kD的模糊量,然后△kP,△kI,△kD要進(jìn)行去模糊化取得精確量,去模糊化有幾種方法,一般用重心法比較合適,由公式可得:
5 軟件實(shí)現(xiàn) 在系統(tǒng)控制電路中,單片機(jī)選用ATMEL公司的AT89C55,程序選用C51進(jìn)行編寫(xiě)。本系統(tǒng)主要模塊有主程序、T0中斷子程序、模糊PID算法子程序等。主程序流程如圖4所示,模糊PID算法的程序流程如圖5所示。
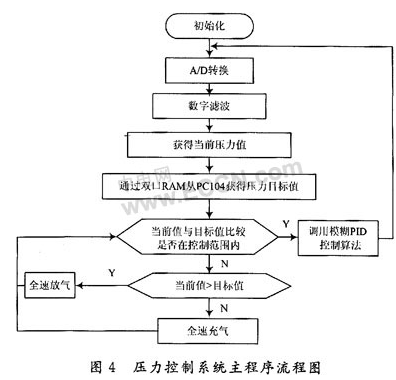

主程序進(jìn)行一系列的初始化后循環(huán)等待中斷;T0產(chǎn)生2 ms定時(shí)中斷,T0中斷服務(wù)子程序?qū)χ袛啻螖?shù)計(jì)數(shù),每50次中斷(100 ms)為一個(gè)控制周期,每一個(gè)控制周期讀入當(dāng)前氣缸壓力采樣值,調(diào)用模糊PID子程序?qū)飧讐毫M(jìn)行精確控制。
6 結(jié) 語(yǔ)
基于智能PWM控制的制動(dòng)控制單元具有以下特點(diǎn):
(1) 系統(tǒng)充分利用了單片機(jī)和PC104的軟硬件,系統(tǒng)結(jié)構(gòu)簡(jiǎn)單、可靠性高、抗干擾能力強(qiáng)。
(2) 系統(tǒng)通過(guò)模糊PID算法由單片機(jī)產(chǎn)生PWM信號(hào)實(shí)現(xiàn)對(duì)機(jī)車制動(dòng)缸和均衡風(fēng)缸的壓力控制,系統(tǒng)調(diào)壓范圍廣,動(dòng)、靜態(tài)性能好、控制精度高、自適應(yīng)能力強(qiáng)。
通過(guò)在株洲電力機(jī)車廠對(duì)制動(dòng)機(jī)的調(diào)試表明,基于智能PWM控制的制動(dòng)控制單元對(duì)機(jī)車制動(dòng)機(jī)制動(dòng)缸和均衡風(fēng)缸的控制精度可達(dá)到±0.5 kPa,可以滿足電力機(jī)車制動(dòng)控制的需要。
責(zé)任編輯:gt
-
傳感器
+關(guān)注
關(guān)注
2565文章
52862瀏覽量
766238 -
單片機(jī)
+關(guān)注
關(guān)注
6067文章
44973瀏覽量
649539 -
PWM
+關(guān)注
關(guān)注
116文章
5474瀏覽量
218992
發(fā)布評(píng)論請(qǐng)先 登錄
脈沖寬度調(diào)制PWM原理
怎么實(shí)現(xiàn)基于智能脈沖寬度調(diào)制控制的機(jī)車制動(dòng)控制單元的設(shè)計(jì)?
脈沖寬度調(diào)制PWM的基本原理控制方式是什么
什么是脈沖寬度調(diào)制(PWM)或脈沖頻率調(diào)制(PFM)
什么是BNC端子,脈沖寬度調(diào)制
PWM(脈沖寬度調(diào)制)的工作原理、分類及其應(yīng)用

什么是脈沖寬度調(diào)制技術(shù)_脈沖寬度調(diào)制是什么含義
脈沖寬度調(diào)制教程
基于數(shù)字電路的實(shí)驗(yàn)脈沖寬度調(diào)制

脈沖寬度調(diào)制(PWM)的基本術(shù)語(yǔ)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論