") 基于MCS-96單片機(jī)和數(shù)據(jù)融合技術(shù)實(shí)現(xiàn)機(jī)器人系統(tǒng)的應(yīng)用方案
基于MCS-96單片機(jī)和數(shù)據(jù)融合技術(shù)實(shí)現(xiàn)機(jī)器人系統(tǒng)的應(yīng)用方案

本系統(tǒng)所設(shè)計(jì)的機(jī)器人的主要任務(wù)是在未知環(huán)境下依靠多傳感器信息,運(yùn)用D-S數(shù)據(jù)融合算法,提供與環(huán)境有關(guān)的關(guān)于系統(tǒng)狀態(tài)的足夠的與可靠的信息,使機(jī)器人能夠自主規(guī)劃路徑、躲避障礙物,最終向目標(biāo)靠近。
本控制系統(tǒng)采用主從式控制系統(tǒng)。系統(tǒng)選用了激光傳感器、超聲傳感器、紅外傳感器、光敏傳感器、光電編碼器等多種類型的傳感器,它們之間相互組合,實(shí)現(xiàn)機(jī)器人小車的測(cè)距、避障、尋找目標(biāo)等功能。
1 多傳感器數(shù)據(jù)融合技術(shù)與D-S方法
多傳感器數(shù)據(jù)融合技術(shù)結(jié)合了控制理論、信號(hào)處理、人工智能、概率和統(tǒng)計(jì)的發(fā)展,協(xié)同運(yùn)用多傳感器的傳感數(shù)據(jù),提取所探測(cè)環(huán)境的近可能多的有用信息,消除信息的不確定性,提高傳感器的可靠性。
多傳感器數(shù)據(jù)融合技術(shù)有許多優(yōu)點(diǎn):增加了測(cè)量的維數(shù)和置信度;改進(jìn)了探測(cè)性能;擴(kuò)展了空間和時(shí)間的覆蓋范圍;改進(jìn)了系統(tǒng)的可靠性和可維護(hù)性;系統(tǒng)容錯(cuò)性好,運(yùn)行魯棒性強(qiáng);系統(tǒng)內(nèi)資源共享,可提高資源的利用率。
D-S證據(jù)理論是Dempster于1967年提出,后由Shafer加以擴(kuò)充和發(fā)展而形成的一種信息融合方法。D-S證據(jù)理論可處理由不知道所引起的不確定性。
D-S方法的推理結(jié)構(gòu)分為三級(jí)。
第一級(jí)是合成。它把來(lái)自幾個(gè)獨(dú)立傳感器的報(bào)告合成為一個(gè)總的輸入。
第二級(jí)是推斷,由它獲取傳感器報(bào)告并進(jìn)行推斷,將傳感器報(bào)告擴(kuò)展成目標(biāo)報(bào)告。
第三級(jí)是更新,因各種傳感器一般都有隨機(jī)誤差,所以在進(jìn)行推斷和傳感器合成之前要先更新傳感器級(jí)的信息。
2 傳感器的選用
本系統(tǒng)所設(shè)計(jì)的智能機(jī)器人具有測(cè)距、自動(dòng)避障、自動(dòng)尋找以一發(fā)光源為目標(biāo)的物體的功能。每一個(gè)功能均選用幾種不同類型的傳感器進(jìn)行測(cè)量,再應(yīng)用D-S融合算法把這些數(shù)據(jù)進(jìn)行融合,最后得到我們需要的更加全面、準(zhǔn)確、可靠的反映環(huán)境特征的信息,指導(dǎo)機(jī)器人的運(yùn)行。
本系統(tǒng)具體傳感器的選用如下:
1) 測(cè)距傳感器
測(cè)距傳感器選用了三種類型的傳感器:激光傳感器、超聲傳感器、紅外傳感器。
2) 避障傳感器
避障傳感器選用了三種類型的傳感器:激光傳感器、超聲傳感器、紅外傳感器。
3) 尋找目標(biāo)傳感器
尋找目標(biāo)傳感器選用了兩種類型的傳感器:紅外傳感器和光敏傳感器。
4) 光電編碼器
用光電編碼器檢測(cè)電機(jī)的轉(zhuǎn)速。
激光傳感器選用的是DLS-A激光測(cè)距傳感器。該設(shè)備擁有許多卓越的性能:測(cè)程0.2-200m,串行接口(RS232或RS422),單根RS422線可連接多達(dá)10個(gè)模塊,范圍寬廣的供電電壓(9-30V),可編程模擬輸出,兩個(gè)可編程數(shù)字輸出端,數(shù)字輸出錯(cuò)誤信號(hào),4個(gè)發(fā)光二極管用于顯示狀態(tài)信號(hào),D型接口和螺旋接線端便于連接,望遠(yuǎn)鏡適配器使得安裝非常簡(jiǎn)便,堅(jiān)固的鋁金屬外殼,IP65(防止灰塵和水汽浸入),完整的軟件配置,二等激光。
3 硬件結(jié)構(gòu)
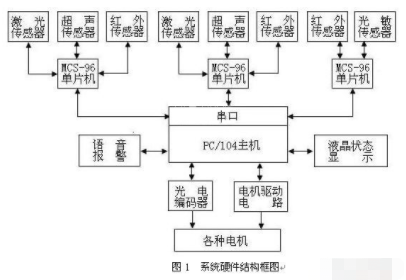
為減輕主控器的負(fù)擔(dān),系統(tǒng)采用主從式控制系統(tǒng)。分別用三個(gè)MCS-96單片機(jī)處理來(lái)自測(cè)距傳感器、超聲傳感器、尋找目標(biāo)傳感器的數(shù)據(jù),并進(jìn)行數(shù)據(jù)融合;最后把處理好的數(shù)據(jù)通過(guò)RS-232串口上傳至上位機(jī)PC/104 386SX系統(tǒng)。由PC/104主機(jī)做出下一步的處理。系統(tǒng)硬件結(jié)構(gòu)框圖如圖1所示。
PC/104主機(jī)主要用來(lái)完成對(duì)三個(gè)下位機(jī)所處理的數(shù)據(jù)進(jìn)行采集,然后根據(jù)情況調(diào)整小車前向電機(jī)、轉(zhuǎn)向電機(jī)的運(yùn)動(dòng),并將光電編碼器測(cè)量到的小車速度等信息顯示在液晶屏幕上,如果發(fā)生碰撞現(xiàn)象,還可用語(yǔ)音進(jìn)行報(bào)警等操作。上位機(jī)選用PC/104主機(jī)是因?yàn)椋旱谝唬?86系統(tǒng)處理速度比單片機(jī)要迅速;第二,為了便于以后系統(tǒng)的擴(kuò)展。
為避免其它不可預(yù)知的故障出現(xiàn),使機(jī)器不能正常運(yùn)行,系統(tǒng)還設(shè)置了一個(gè)硬復(fù)位按鈕。
4 軟件設(shè)計(jì)
各個(gè)下位機(jī)的軟件設(shè)計(jì)流程是先檢測(cè)各類傳感器的數(shù)據(jù),再用D-S法進(jìn)行數(shù)據(jù)融合,最后等待主機(jī)的指令,把融合后的數(shù)據(jù)上傳至主機(jī)。
主機(jī)的軟件設(shè)計(jì)流程是通過(guò)串口循環(huán)接收來(lái)自三個(gè)不同下位機(jī)的數(shù)據(jù)(三個(gè)下位機(jī)的通訊握手地址不同)。根據(jù)尋找目標(biāo)傳感器所測(cè)到的目標(biāo)位置,進(jìn)行路徑規(guī)劃,調(diào)整前向電機(jī)與轉(zhuǎn)向電機(jī)的運(yùn)動(dòng)方向。再根據(jù)測(cè)距傳感器所測(cè)到的目標(biāo)距離,調(diào)整電機(jī)的運(yùn)動(dòng)速度。當(dāng)避障傳感器發(fā)現(xiàn)前方有障礙物或小車與障礙物發(fā)生碰撞時(shí),要立即停止運(yùn)行,重新規(guī)劃路徑。讀取光電編碼器的值,把小車速度顯示在液晶顯示器上。如果出現(xiàn)小車與障礙物發(fā)生碰撞或找不到目標(biāo)光源物體時(shí)要通過(guò)語(yǔ)音芯片進(jìn)行報(bào)警。
主機(jī)和下位機(jī)程序內(nèi)部均設(shè)有看門狗程序,避免程序跑飛。
5 總結(jié)
本系統(tǒng)設(shè)計(jì)了一個(gè)基于多傳感器數(shù)據(jù)融合技術(shù)的智能機(jī)器人。該設(shè)計(jì)運(yùn)用了多傳感器數(shù)據(jù)融合技術(shù),采用了主從式控制系統(tǒng),使機(jī)器人能夠更準(zhǔn)確的尋找目標(biāo)與避障,有很好的魯棒性。
本文作者創(chuàng)新點(diǎn):(1)提出一種基于多傳感器數(shù)據(jù)融合技術(shù)的智能機(jī)器人系統(tǒng)設(shè)計(jì),軟硬件工作可靠。(2)用到D-S融合算法,提供與環(huán)境有關(guān)的關(guān)于系統(tǒng)狀態(tài)的足夠的與可靠的信息,使機(jī)器人能夠自主規(guī)劃路徑、躲避障礙物,最終向目標(biāo)靠近。(3)系統(tǒng)采用了主從式控制系統(tǒng),有很好的擴(kuò)展性。(4)良好的抗干擾能力。
責(zé)任編輯:gt
-
傳感器
+關(guān)注
關(guān)注
2564文章
52794瀏覽量
765485 -
單片機(jī)
+關(guān)注
關(guān)注
6067文章
44961瀏覽量
648908 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29615瀏覽量
212201
發(fā)布評(píng)論請(qǐng)先 登錄
MCS-96系列單片機(jī)中斷優(yōu)先級(jí)的控制方法
MCS-51系列和80C51系列單片機(jī)的區(qū)別
請(qǐng)問(wèn)機(jī)器人用的是Linux系統(tǒng)還是單片機(jī)呀
mcs-96系列單片機(jī)
智能清潔機(jī)器人
【深聯(lián)華杯】基于SLH89F5162單片機(jī)的智能清潔機(jī)器人
單片機(jī)教學(xué)機(jī)器人-鷗鵬科技
基于MSP430F149單片機(jī)設(shè)計(jì)的室外移動(dòng)機(jī)器人組合導(dǎo)航定位系統(tǒng)
如何實(shí)現(xiàn)移動(dòng)機(jī)器人的設(shè)計(jì)?
MCS-51系列單片機(jī)型號(hào)
MCS-51單片機(jī)系統(tǒng)擴(kuò)展技術(shù)
單片機(jī)的自動(dòng)巡線輪式機(jī)器人控制系統(tǒng)設(shè)計(jì)方案
MCS-96單片機(jī)的應(yīng)用系統(tǒng)設(shè)計(jì)基礎(chǔ)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論