") 3D激光雷達(dá)和相機(jī)校準(zhǔn)是如何考慮傳感器之間誤差的?
3D激光雷達(dá)和相機(jī)校準(zhǔn)是如何考慮傳感器之間誤差的?

作者:Raphael Voges and Bernardo Wagner
來(lái)源:IROS 2020
大家好,今天為大家?guī)?lái)的文章是—— 集員法對(duì)3D激光雷達(dá)和相機(jī)的外部校準(zhǔn)(Set-Membership Extrinsic Calibration of a 3D LiDAR and a Camera)。
這篇文章與傳感器的融合相關(guān),主要介紹了3D激光雷達(dá)和相機(jī)校準(zhǔn)時(shí)候是如何考慮不同傳感器之間的誤差的;
為了融合來(lái)自3D激光雷達(dá)和相機(jī)的信息,需要知道傳感器坐標(biāo)系之間的外部校準(zhǔn)。
傳統(tǒng)的外部校準(zhǔn)方案有三個(gè)缺點(diǎn):
傳統(tǒng)的校準(zhǔn)方法忽略了傳感器誤差,導(dǎo)致了校準(zhǔn)失真;
傳統(tǒng)的校準(zhǔn)方法假設(shè)了初始平均誤差為0,默認(rèn)傳感器每次測(cè)量接近真實(shí)值,這種假設(shè)常常失效。例如,激光雷達(dá)入射角和反射率帶來(lái)的誤差,可能會(huì)導(dǎo)致激光雷達(dá)偏移的情形;
傳統(tǒng)的校準(zhǔn)方法不能評(píng)估提取特征的準(zhǔn)確性,因此不能在外部校準(zhǔn)的時(shí)候不能通過(guò)調(diào)整特征的權(quán)重提高準(zhǔn)確性。
本文創(chuàng)新點(diǎn):
提出了一種基于圖像的檢測(cè)方法,該方法將YOLOv3架構(gòu)擴(kuò)展為具有3D質(zhì)心損失和中級(jí)特征融合,以利用這兩種方式的互補(bǔ)信息;
介紹基于間距的方法(interval-based approaches)來(lái)提取圖像和激光點(diǎn)云的相應(yīng)特征;
利用間距的特征設(shè)定約束滿足問(wèn)題(Constraint Satisfaction Problem, CSP),在仿真和實(shí)驗(yàn)中驗(yàn)證了準(zhǔn)確性。
貢獻(xiàn)
提出了一種基于圖像的檢測(cè)方法,該方法將YOLOv3架構(gòu)擴(kuò)展為具有3D質(zhì)心損失和中級(jí)特征融合,以利用這兩種方式的互補(bǔ)信息;
介紹基于間距的方法(interval-based approaches)來(lái)提取圖像和激光點(diǎn)云的相應(yīng)特征;
利用間距的特征設(shè)定約束滿足問(wèn)題(Constraint Satisfaction Problem, CSP),在仿真和實(shí)驗(yàn)中驗(yàn)證了準(zhǔn)確性。
方法介紹
如圖1所示,間隔向量(interval vectors)形成了一個(gè)框(scan box),包圍了實(shí)際測(cè)量的一些點(diǎn)集。通過(guò)使用掃描框,可以得到平面的垂直矢量(plane normal vector)、邊界線的矢量(line direction vectors)、標(biāo)定棋盤的四個(gè)角上的點(diǎn)(corner boxes)。
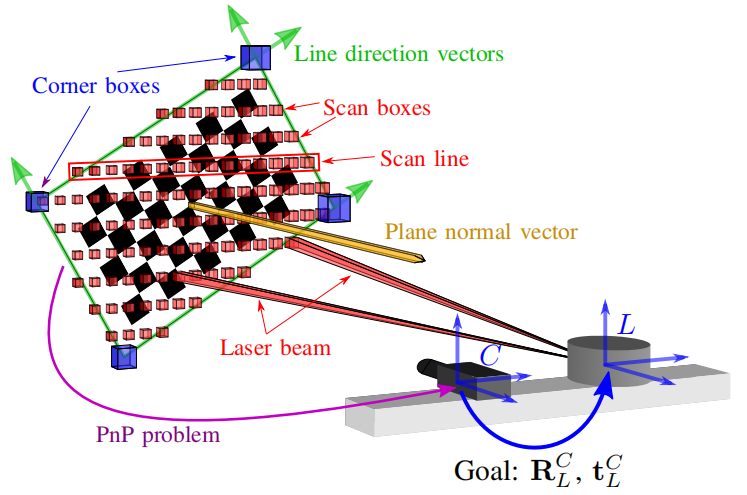
圖1:本文的方法概述。為了找到外部校準(zhǔn),如旋轉(zhuǎn)矩陣R和轉(zhuǎn)換向量t,在間距不確定的情況下,相機(jī)和3D激光雷達(dá)之間尋找點(diǎn)、線、面特征。
傳感器誤差模型
A.相機(jī)模型:
我們采用OpenCV庫(kù)中包含的方法,用于檢測(cè)相機(jī)圖像中的棋盤角。因此,我們使用的原始測(cè)量是圖像中的像素點(diǎn)。然后,針孔相機(jī)模型用于找到指向棋盤角的方向的3D向量。
不能完全檢測(cè)到角的原因:
相機(jī)具有有限的分辨率,因此必須將模擬信號(hào)(即實(shí)際場(chǎng)景)離散地分為像素;
圖像模糊,例如檢測(cè)對(duì)象未處于適當(dāng)?shù)木劢梗?/p>
圖像傳感器受到損壞,每個(gè)像素的各個(gè)顏色通道產(chǎn)生了噪聲,從而在角檢測(cè)期間再次導(dǎo)致誤差。
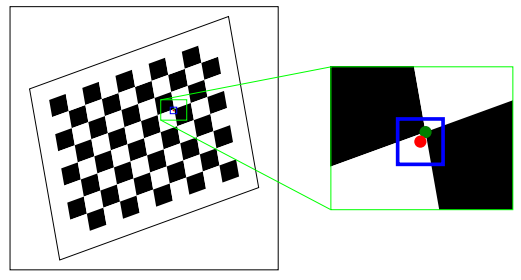
圖2:檢測(cè)到棋盤角(綠色點(diǎn))的棋盤的示例圖。各種誤差源導(dǎo)致檢測(cè)不準(zhǔn)確(紅色點(diǎn))。因此,我們應(yīng)用了我們的界限誤差模型,來(lái)包裹真實(shí)特征的藍(lán)色邊框。
B.激光雷達(dá)模型:
由于激光雷達(dá)的激光光束和表面入射角受到傳感器的環(huán)境(溫度,濕度等)的影響,實(shí)際測(cè)量通常產(chǎn)生誤差。由于無(wú)法預(yù)測(cè)此系統(tǒng)錯(cuò)誤,因此無(wú)法使用已建立的隨機(jī)誤差模型進(jìn)行建模。測(cè)量點(diǎn)的實(shí)際位置是不確定的,并且可以是激光光束掃描的任何位置。因此,選擇基于間距的模型來(lái)考慮這種不確定性。
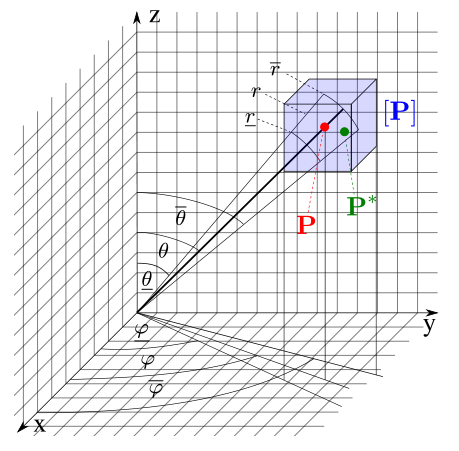
圖3:3D盒[P]的可視化由未知但是界面的誤差為球形坐標(biāo)R,θ和φ產(chǎn)生的誤差。3D盒可以保證覆蓋實(shí)際測(cè)量的點(diǎn)P *和原始測(cè)量的點(diǎn)P。
主要結(jié)果
我們使用Gazebo 和實(shí)際數(shù)據(jù)生成的模擬數(shù)據(jù)來(lái)評(píng)估我們的方法。此外,將我們的方法與最先進(jìn)算法進(jìn)行了比較。然而,直接比較是不合適的,因?yàn)樗麄兊姆椒ǖ哪繕?biāo)是找到最好的點(diǎn)值結(jié)果(point-valued result),而我們的方法旨在封閉真實(shí)的解決方案并同時(shí)表明計(jì)算的不確定性。
A.仿真數(shù)據(jù)
選擇尺寸為100×76厘米的標(biāo)定棋盤,其中,棋盤距離多傳感器系統(tǒng)大約2.5米。模擬相機(jī)的像素誤差遵循高斯分布,平均值為0,標(biāo)準(zhǔn)偏差為0.01。這導(dǎo)致相機(jī)校準(zhǔn)期間0.3 px的最大角度檢測(cè)誤差。模擬3D激光雷達(dá)的型號(hào)是Velodyne VLP16。球形坐標(biāo)的誤差遵循均勻的分布,無(wú)需任何異常值。
首先,我們顯示從一個(gè)標(biāo)定棋盤姿態(tài)計(jì)算的轉(zhuǎn)換參數(shù)的結(jié)果。如圖所示,我們選擇六種不同的棋盤姿態(tài),以顯示對(duì)不同外部校準(zhǔn)參數(shù)的影響。
圖4:六種不同棋盤姿態(tài)的模擬圖像。
對(duì)于所有六個(gè)姿態(tài),我們的方法包含真實(shí)的轉(zhuǎn)換參數(shù)。然而,轉(zhuǎn)換參數(shù)的準(zhǔn)確性隨著表I中的參數(shù)變化。這可以通過(guò)標(biāo)定棋盤的相應(yīng)姿態(tài)來(lái)解釋。例如,Pose1和Pose5可以通過(guò)沿Z軸旋轉(zhuǎn)和平移實(shí)現(xiàn)。
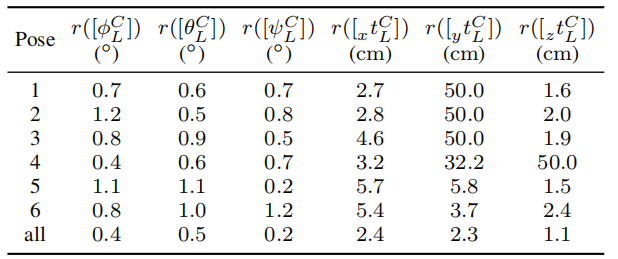
表I:圖3中的姿勢(shì)的間距半徑
表II顯示了相機(jī)和激光掃描儀的不同模擬誤差的結(jié)果。顯然,相應(yīng)地調(diào)整傳感器誤差界限。例如,第二行示出了用于[Δpx] = [-0.4,0.4] px的間隔半徑,而其他傳感器誤差界限保持不變。作為參考,第一行顯示出了上面引入和評(píng)估的錯(cuò)誤界限的結(jié)果。表格可以說(shuō)明我們的方法可以在增加不確定性的情況下處理相機(jī)和激光掃描數(shù)據(jù)的不同誤差。
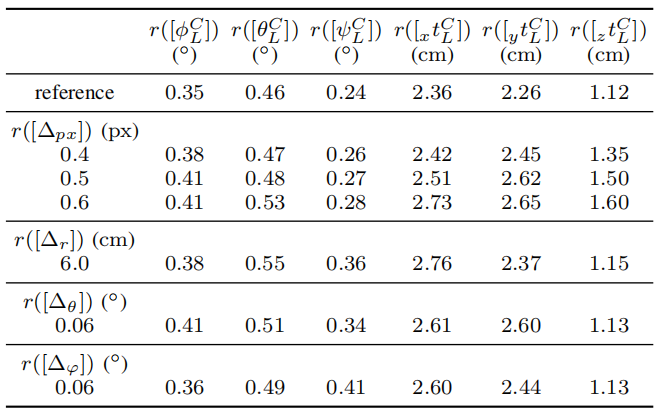
表2:不同模擬誤差參數(shù)的影響
接下來(lái),展示了系統(tǒng)誤差對(duì)我們方法的影響。我們使用總共27個(gè)棋盤姿態(tài),包括上面所示的六個(gè)姿態(tài),在傳感器設(shè)置周圍的旋轉(zhuǎn)空間中均勻分布。

表3:結(jié)果顯示偏誤差測(cè)量對(duì)我們和最先進(jìn)的方法的比較
B.真實(shí)數(shù)據(jù)
如圖4所示,實(shí)驗(yàn)設(shè)備包括Velodyne VLP-16 LIDAR,FLIR Grasshopper3相機(jī)和100×76cm標(biāo)定棋盤。相機(jī)的分辨率為1920×1200 px。激光雷達(dá)LiDAR的垂直角分辨率為2°。此外,LiDAR的旋轉(zhuǎn)速率設(shè)定為5Hz,導(dǎo)致水平角分辨率為0.1?。
我們收集了26個(gè)不同的棋盤姿勢(shì)的數(shù)據(jù)。表IV顯示結(jié)果。得到的間距結(jié)果和仿真結(jié)果類似。因此,我們的方法不僅可以使用外在校準(zhǔn)并評(píng)估其準(zhǔn)確性,還可以驗(yàn)證隨機(jī)方法的結(jié)果。
表4:我們和最先進(jìn)方法的數(shù)據(jù)結(jié)果比較
原文標(biāo)題:3D激光雷達(dá)和相機(jī)的外部校準(zhǔn)
文章出處:【微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
責(zé)任編輯:haq
-
3D
+關(guān)注
關(guān)注
9文章
2959瀏覽量
110626 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4230瀏覽量
192696
原文標(biāo)題:3D激光雷達(dá)和相機(jī)的外部校準(zhǔn)
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
SPAD席卷車載激光雷達(dá)市場(chǎng)
FMCW激光雷達(dá),工業(yè)應(yīng)用新進(jìn)展
激光雷達(dá)技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用

激光雷達(dá)技術(shù):自動(dòng)駕駛的應(yīng)用與發(fā)展趨勢(shì)

激光位移傳感器的校準(zhǔn)方法
京瓷發(fā)布全球首款“攝像頭-激光雷達(dá)”融合傳感器
Lidwave Odem 4D激光雷達(dá)榮獲2025年CES創(chuàng)新獎(jiǎng)
激光雷達(dá)+攝像頭融合傳感器,有沒(méi)有搞頭?
禾賽科技CES 2025發(fā)布迷你型超半球3D激光雷達(dá)JT系列
禾賽科技推出面向機(jī)器人領(lǐng)域的迷你3D激光雷達(dá)
激光雷達(dá)技術(shù)或可助力防御無(wú)人機(jī)
Sonair推出用于機(jī)器人避障的3D超聲波傳感器
激光雷達(dá)在SLAM算法中的應(yīng)用綜述






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論