 二叉樹的前序遍歷非遞歸實現
二叉樹的前序遍歷非遞歸實現

我們之前說了二叉樹基礎及二叉的幾種遍歷方式及練習題,今天我們來看一下二叉樹的前序遍歷非遞歸實現。
前序遍歷的順序是, 對于樹中的某節點,先遍歷該節點,然后再遍歷其左子樹,最后遍歷其右子樹。
我們先來通過下面這個動畫復習一下二叉樹的前序遍歷。
迭代遍歷
我們試想一下,之前我們借助隊列幫我們實現二叉樹的層序遍歷,
那么可不可以,也借助數據結構,幫助我們實現二叉樹的前序遍歷。
假設我們的二叉樹為 [1,2,3]。我們需要對其進行前序遍歷。其遍歷順序為
當前節點 1,左孩子 2,右孩子 3。
這里可不可以用棧,幫我們完成前序遍歷呢?
棧和隊列的那些事
我們都知道棧的特性是先進后出,我們借助棧來幫助我們完成前序遍歷的時候。
則需要注意的一點是,我們應該先將右子節點入棧,再將左子節點入棧。
這樣出棧時,則會先出左節點,再出右子節點,則能夠完成樹的前序遍歷。
我們用一句話對上圖進行總結,當棧不為空時,棧頂元素出棧,如果其右孩子不為空,則右孩子入棧,其左孩子不為空,則左孩子入棧。還有一點需要注意的是,我們和層序遍歷一樣,需要先將 root 節點進行入棧,然后再執行 while 循環。
看到這里你已經能夠自己編寫出代碼了,不信你去試試。
時間復雜度:O(n) 需要對所有節點遍歷一次
空間復雜度:O(n) 棧的開銷,平均為 O(logn) 最快情況,即斜二叉樹時為 O(n)
參考代碼
class Solution {
public List《Integer》 preorderTraversal(TreeNode root) {
List《Integer》 list = new ArrayList《》();
Stack《TreeNode》 stack = new Stack《》();
if (root == null) return list;
stack.push(root);
while (!stack.isEmpty()) {
TreeNode temp = stack.pop();
if (temp.right != null) {
stack.push(temp.right);
}
if (temp.left != null) {
stack.push(temp.left);
}
//這里也可以放到前面
list.add(temp.val);
}
return list;
}
}
Morris
Morris 遍歷利用樹的左右孩子為空(大量空閑指針),實現空間開銷的極限縮減。這個遍歷方式,稍微有那么一丟丟難理解,不過結合動圖,也就一目了然,下面我們先看動畫吧。
看完視頻,是不是感覺自己搞懂了,又感覺自己沒搞懂,哈哈,咱們繼續往下看。
我們之前說的,Morris 遍歷利用了樹中大量空閑指針的特性,我們需要找到當前節點的左子樹中的最右邊的葉子節點,將該葉子節點的 right 指向當前節點。例如當前節點為2,其左子樹中的最右節點為 9 ,則在 9 節點添加一個 right 指針指向 2。
其實上圖中的 Morris 遍歷遵循兩個原則,我們在動畫中也能夠得出。
1.當 p1.left == null 時,p1 = p1.right。(這也就是我們為什么要給葉子節點添加 right 指針的原因)
2.如果 p1.left != null,找到 p1 左子樹上最右的節點。(也就是我們的 p2 最后停留的位置),此時我們又可以分為兩種情況,一種是葉子節點添加 right 指針的情況,一種是去除葉子節點 right 指針的情況。
如果 p2 的 right 指針指向空,讓其指向 p1,p1向左移動,即 p1 = p1.left
如果 p2 的 right 指針指向 p1,讓其指向空,(為了防止重復執行,則需要去掉 right 指針)p1 向右移動,p1 = p1.right。
這時你可以結合咱們剛才提到的兩個原則,再去看一遍動畫,并代入規則進行模擬,差不多就能完全搞懂啦。
下面我們來對動畫中的內容進行拆解 ,
首先 p1 指向 root節點
p2 = p1.left,下面我們需要通過 p2 找到 p1的左子樹中的最右節點。即節點 5,然后將該節點的 right 指針指向 root。并記錄 root 節點的值。
向左移動 p1,即 p1 = p1.left
p2 = p1.left ,即節點 4 ,找到 p1 的左子樹中的最右葉子節點,也就是 9,并將該節點的 right 指針指向 2。
繼續向左移動 p1,即 p1 = p1.left,p2 = p1.left。也就是節點 8。并將該節點的 right 指針指向 p1。
我們發現這一步給前兩步是一樣的,都是找到葉子節點,將其 right 指針指向 p1,此時我們完成了添加 right 指針的過程,下面我們繼續往下看。
我們繼續移動 p1 指針,p1 = p1.left。p2 = p.left。此時我們發現 p2 == null,即下圖此時我們需要移動 p1, 但是不再是 p1 = p1.left 而是 p1 = p1.right。也就是 4,繼續讓 p2 = p1.left。此時則為下圖這種情況
此時我們發現 p2.right != null 而是指向 4,說明此時我們已經添加過了 right 指針,所以去掉 right 指針,并讓 p1 = p1.right
下面則繼續移動 p1 ,按照規則繼續移動即可,遇到的情況已經在上面做出了舉例,所以下面我們就不繼續贅述啦,如果還不是特別理解的同學,可以再去看一遍動畫加深下印象。時間復雜度 O(n),空間復雜度 O(1)下面我們來看代碼吧。
代碼
class Solution {
public List《Integer》 preorderTraversal(TreeNode root) {
List《Integer》 list = new ArrayList《》();
if (root == null) {
return list;
}
TreeNode p1 = root; TreeNode p2 = null;
while (p1 != null) {
p2 = p1.left;
if (p2 != null) {
//找到左子樹的最右葉子節點
while (p2.right != null && p2.right != p1) {
p2 = p2.right;
}
//添加 right 指針,對應 right 指針為 null 的情況
if (p2.right == null) {
list.add(p1.val);
p2.right = p1;
p1 = p1.left;
continue;
}
//對應 right 指針存在的情況,則去掉 right 指針
p2.right = null;
} else {
list.add(p1.val);
}
//移動 p1
p1 = p1.right;
}
return list;
}
}
原文標題:把二叉樹揉碎(二)
文章出處:【微信公眾號:算法與數據結構】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
二叉樹
+關注
關注
0文章
74瀏覽量
12613
原文標題:把二叉樹揉碎(二)
文章出處:【微信號:TheAlgorithm,微信公眾號:算法與數據結構】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
想在rtsmart中使用uart2,是不是只能通過修改設備樹方法來實現uart2的復用呀?
機器人看點:宇樹科技王興興回上海母校 加速商業化落地 宇樹機器人二手租賃火爆
宇樹科技在物聯網方面
嵌入式學習-飛凌嵌入式ElfBoard ELF 1板卡-初識設備樹之設備樹組成和結構
字符串反轉的實現方式
飛凌嵌入式ElfBoard ELF 1板卡-初識設備樹之設備樹組成和結構
ATA-2041高壓放大器在叉指形電極管狀壓電元件電極制備中的應用
dp接口的最新技術發展
鐳神智能機器人三向叉式3D SLAM無人叉車:重塑高位堆垛與窄通道倉儲新境界

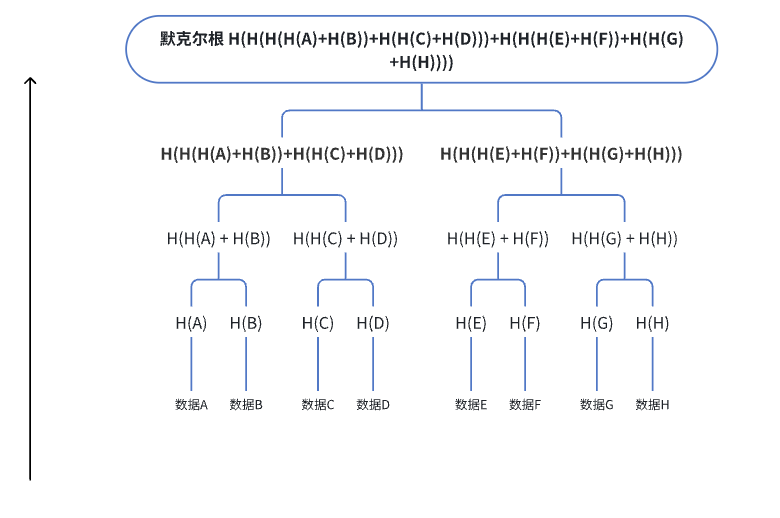
什么是默克爾樹(Merkle Tree)?如何計算默克爾根?
【北京迅為】iTOP-i.MX6開發板使用手冊第四部分固件編譯第十四章非設備樹Android4.4系統編譯
Python遞歸的經典案例
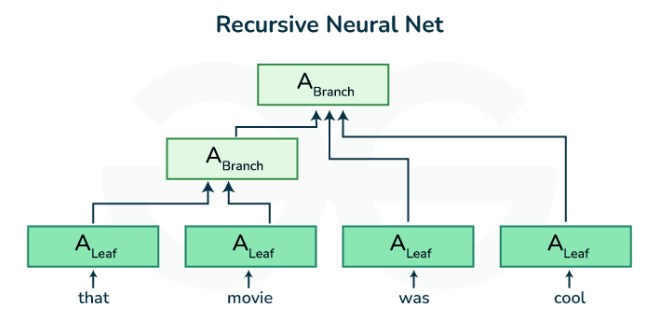
遞歸神經網絡和循環神經網絡的模型結構





 工商網監
工商網監
評論