") 教大家怎么去消除步進電機的噪音和振動
教大家怎么去消除步進電機的噪音和振動

步進電機的噪音來自哪里?
由于步進電機由于結(jié)構(gòu)簡單、控制方便、安全性高、成本低、停止時候力矩大、在低速情況下不需要減速機就可以輸出很大的力矩、相比直流無刷和伺服電機,步進電機不需要復(fù)雜的控制算法也不需要編碼器反饋情況下可以實現(xiàn)位置控制。
被用在很多要求精確定位的場合,基本上在很多需要移動控制的場合都會用到步進電機如自動化控制、數(shù)字化生產(chǎn)如3D、醫(yī)療和光學(xué)等眾多領(lǐng)域。
步進電機有一個缺點就是噪音比較大,特別是在低速的時候。震動主要來自兩個方面一是步進電機的步距分辨率(步距階躍)另一方面是來自斬波和脈寬調(diào)制(PWM)的不良模式反應(yīng)。
步距角分辨率和細(xì)分
典型的步進電機有50個極(Poles),就是200個整步(Full Steps) ,也就是整步情況下每步1.8°角度,電機旋轉(zhuǎn)一周需要360°。但是也有些步進電機的步距角更小比如整步需要800步的。
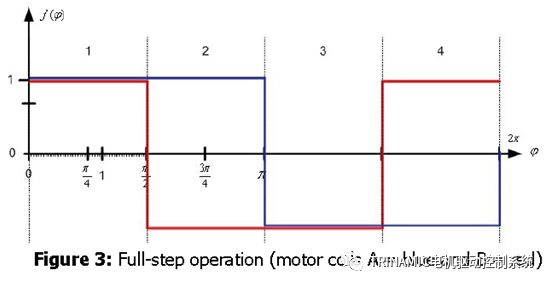
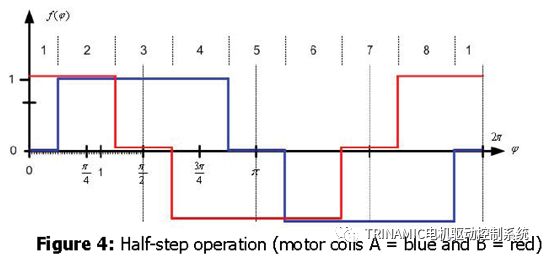
起初,這些步進電機被用作整步或者半步模式下,矢量電流提供給電機線圈A(藍色)和線圈B(紅色)矩形曲線圖。描述了整個一個周期360°的曲線。在圖3和圖4中很明顯看到電機線圈在90°換相點處線圈電流要么是最大電流(full power)要么是沒有電流。
一個周期內(nèi)(360°)每組線圈由4個整步或者8個半步構(gòu)成。也就是50個極的步進電機需要50個電氣步距來完成一周的機械旋轉(zhuǎn)(360°)。
低的步距分辨率模式比如半步或者整步是步進電機噪音的主要來源。會引起極大的震動在這個機械系統(tǒng)中,尤其是在低速運行時和接近機械共振頻率的時候。在高速的時候,恰好由于慣量的存在這個效應(yīng)會被降低,電機的轉(zhuǎn)子可以為認(rèn)為成諧波振蕩器或者彈簧鐘擺,如圖5。
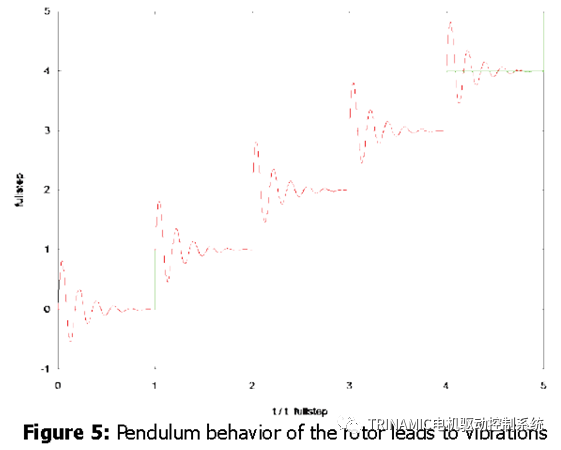
在新的矢量電流從驅(qū)動器端輸出之后,電機轉(zhuǎn)子會根據(jù)新的位置指令移動下一個整步或者半步的位置和脈搏反應(yīng)相似在新的位置點周圍,轉(zhuǎn)子會產(chǎn)生超調(diào)和振蕩,如此一來會導(dǎo)致機械振動和噪音。
為了減少這些震動,等步細(xì)分的原來被提了出來,將一個整步分割成更小的部分或者微步細(xì)分,典型的細(xì)分?jǐn)?shù)是2(half-stepping)、4(quarter-stepping)、8、32甚至更大的細(xì)分。
電機定子線圈的電流并不是最大電流(Fullcurrent)或者就是沒有電流,而是一個中間的電流值,相比于4個整步電流(4full steps)更接近于一個正弦波形狀。永磁體的轉(zhuǎn)子位置處在2個整步位置之間(合成磁場位置)。
最大的細(xì)分?jǐn)?shù)是由驅(qū)動器的A/D和D/A能力決定。TRINAMIC所提供的驅(qū)動和控制器可以達到256細(xì)分(8bit)采用集成的正弦波配置表格,步進電機可以實現(xiàn)非常小的角度控制,描述了在達到新位置時候的波動。
斬波和PWM模式
噪音和振動的另外一個來源是傳統(tǒng)的斬波方式和脈寬調(diào)制(PWM)模式,由于比較粗的步距分辨率是產(chǎn)生振動和噪音的主要因素,我們通常忽視了斬波和PWM帶來的問題。
傳統(tǒng)的恒定PWM斬波模式是電流控制的PWM斬波模式,該模式在快速衰減和慢速衰減之間有個固定關(guān)系,在其最大數(shù)值的時候,電流才會達到規(guī)定的目標(biāo)電流,最終導(dǎo)致平均電流是小于預(yù)期目標(biāo)電流的。
在一個完整的電周期內(nèi),電流方向改變時在正弦波過零處有個平穩(wěn)過渡期,這個會影響在很短的過渡期內(nèi)線圈里面的電流為零,也就是電機此時根本就沒有力矩,這就導(dǎo)致了電機擺動和振動,尤其是在低速情況下。
相比恒定的斬波模式,TRINAMIC的SpreadCycle PWM斬波模式在慢速和快速衰減器之間自動配置一個磁滯衰減功能。平均電流反應(yīng)了配置的正常電流,在正弦的過零點不會出現(xiàn)過渡期,這就減少電流和力矩的波動,是電流波形更加接近正弦波,相比傳統(tǒng)恒定斬波模式,SpreadCycle PWM斬波模式控制下的電機運行得要平穩(wěn)、平滑很多。
這一點在電機從靜止或低速到中速過程中非常重要。
如何使步進電機實現(xiàn)完全的靜音?
盡管高細(xì)分能解決大部分情況下的低頻震動;先進的電流控制PWM斬波模式比如TRINAMIC的SpreadCycle算法,這些在硬件上的作用很大程度上減少震動和顫動,這也滿足了大部分的應(yīng)用,也適合高速運動。
但是基于電流控制的斬波模式,還是會存在可聽得見的噪音和振動,主要是由于電機線圈的不同步,檢測電阻上幾毫伏的調(diào)節(jié)噪音和PWM時基誤差,這些噪音和振動在一些高端應(yīng)用場合也是不被允許的,緩慢運行或中速運動的應(yīng)用,以及任何不允許有噪音和場合。
TRINAMIC的StealthChop算法也是通過硬件來實現(xiàn)的,從根本上使步進電機靜音,但是Stealthchop功能如何影響了步進電機?為什么電機不會出現(xiàn)噪音和震動?Stealthchop采用一種與基于電流斬波模式如SpeadCycle完全不同的方法。而是采用基于電壓斬波模式一種新技術(shù),該技術(shù)保證了電機的靜音和平穩(wěn)平滑運動。
TMC5130-一款小體積,精巧的步進電機驅(qū)動控制芯片,帶有StealthChop模式。TRINAMIC改進了電壓調(diào)節(jié)模式聯(lián)合了電流控制。為了最大限度降低電流波動,TMC5130采用基于電流反饋來控制電壓調(diào)制,這允許系統(tǒng)自適應(yīng)電機的參數(shù)和運行電壓。來自直接電流控制回路算法引起的微小震蕩被消除。
StealthChop模式下過零點的效果是非常完美的:當(dāng)電流的信號從正變?yōu)樨?fù)或者負(fù)變?yōu)檎粫羞^渡區(qū)域而是持續(xù)性的穿過零點。因為電流的調(diào)制是根據(jù)PWM占空比來控制的。
在50%的PWM占空比,電流是0,StealthChop調(diào)整PWM的占空比來調(diào)節(jié)電機電流,PWM頻率是個常數(shù),與此相反 電流控制的斬波器通過調(diào)控頻率實現(xiàn)調(diào)節(jié)電機電流,在這里 電流的波動是比較大的,此外電流的波動會在電機的永磁體轉(zhuǎn)子里產(chǎn)生渦流,這會導(dǎo)致電機的功耗損失。
這些頻率變化著的PWM發(fā)出的聲音是在可聽范圍之內(nèi)的,會發(fā)出嘶嘶的聲音,而且電子定子會由于磁致伸縮產(chǎn)生更大的噪音,進而會傳遞引起機械系統(tǒng)的震動。而StealthChop的固定斬波頻率就不會有這些問題。沒有斬波頻率的變化 除了電機運行時候微步相序分配器的變化。
除了電機軸承鋼球磨擦的聲音,這是無法避免的之外,StealthChop可以驅(qū)動電機工作在極度的靜音下,可以實現(xiàn)控制電機聲音在10dB分貝以下,噪音大大低于傳統(tǒng)的電流控制方式。我們從物理中得知 3dB分貝的減少量會將噪音程度降低一半。
對步進電機來說改變了什么?
如今步進電機還是一種十分經(jīng)濟的電機,已經(jīng)被應(yīng)用了很多年,依舊采用和原來一樣的材料,一樣的生產(chǎn)工序和裝配工藝。
但是相比過去,如今步進電機被更簡單的控制單元驅(qū)動,更先進的算法和更高度集成的微電子是原來的電機發(fā)揮出更大的潛能。在接近電機的驅(qū)動電路中更多的信息被獲取和處理并實時在驅(qū)動電流里被處理以優(yōu)化電機控制。
StealthChop便是一個完美的例子它的算法和PWM斬波緊密聯(lián)系,此外這些信息還可以反饋到更高的應(yīng)用控制層,而傳統(tǒng)的步進驅(qū)動方案都是單向的(脈沖/方向),所有TRINAMIC的智能步進電機驅(qū)動方案都是雙向通訊,這些接口還可以監(jiān)測不同狀態(tài)、診斷信息。這可以增加系統(tǒng)的可靠性,提供系統(tǒng)的性能。
StealthChop靜音驅(qū)動技術(shù)非常適合3D打印、桌面型CNC、高端的CCTV、體外診斷設(shè)備、醫(yī)療檢測設(shè)備等對噪音要求敏感的場合。
TRINAMIC提供帶有StealthChop功能的模塊,包括單軸、三軸和六軸驅(qū)控模塊。傳統(tǒng)的控制模式下步進電機在低速情況下會出現(xiàn)比較大的噪音和震動,而在StealthChop模式下即使速度很低也聽不到明顯的聲音。
編輯:jq
-
步進電機
+關(guān)注
關(guān)注
152文章
3165瀏覽量
149543
原文標(biāo)題:【技術(shù)貼】如何消除步進電機的噪音和振動?
文章出處:【微信號:FortiorTech,微信公眾號:峰岹科技Fortior】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
電機常見的噪音、振動問題及解決方法
剎車步進電機的特點

處理電機振動的步驟
行星減速步進電機與步進電機的區(qū)別

步進電機如何自適應(yīng)控制?步進電機如何細(xì)分驅(qū)動控制?
什么是混合式步進電機?舉例分析
步進電機主要有哪些分類?步進電機的主要構(gòu)造是什么?
什么是步進電機?它的工作原理是什么?

絲桿步進電機和普通步進電機有什么區(qū)別

絲桿步進電機和步進電機有什么區(qū)別?
直線電機在運行時噪音大不大





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論