") 端到端的無(wú)人機(jī)導(dǎo)航模擬演示
端到端的無(wú)人機(jī)導(dǎo)航模擬演示

借助現(xiàn)代人工智能算法,多旋翼無(wú)人機(jī)可以成為智能代理,在未知環(huán)境中導(dǎo)航。給定目的地,無(wú)人機(jī)可以控制環(huán)境,重建環(huán)境地圖并動(dòng)態(tài)規(guī)劃到目的地的軌跡。這項(xiàng)工作的目的是構(gòu)建一個(gè)端到端的網(wǎng)絡(luò)用于研究和教育目的的模擬環(huán)境。這里,端到端指的是在一個(gè)模擬器中驗(yàn)證所有感知、反應(yīng)和控制算法的能力(圖1a)。
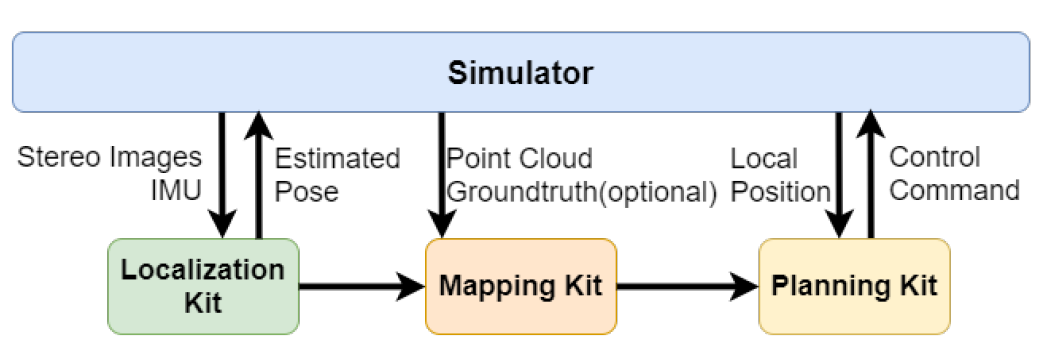
(a)模擬器的系統(tǒng)概述
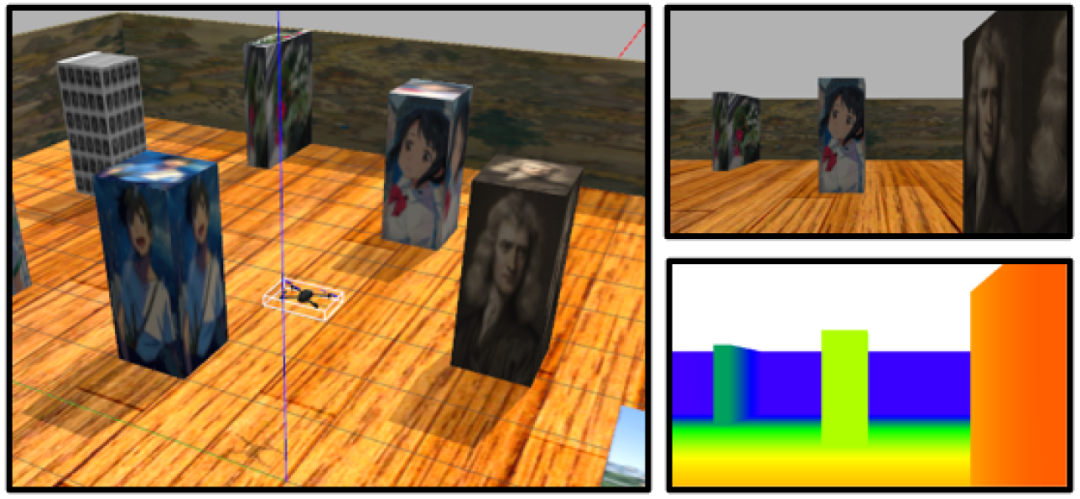
(b) 無(wú)人機(jī)在模擬器中,右側(cè)圖像是來(lái)自車載攝像頭的實(shí)時(shí)彩色和深度圖像
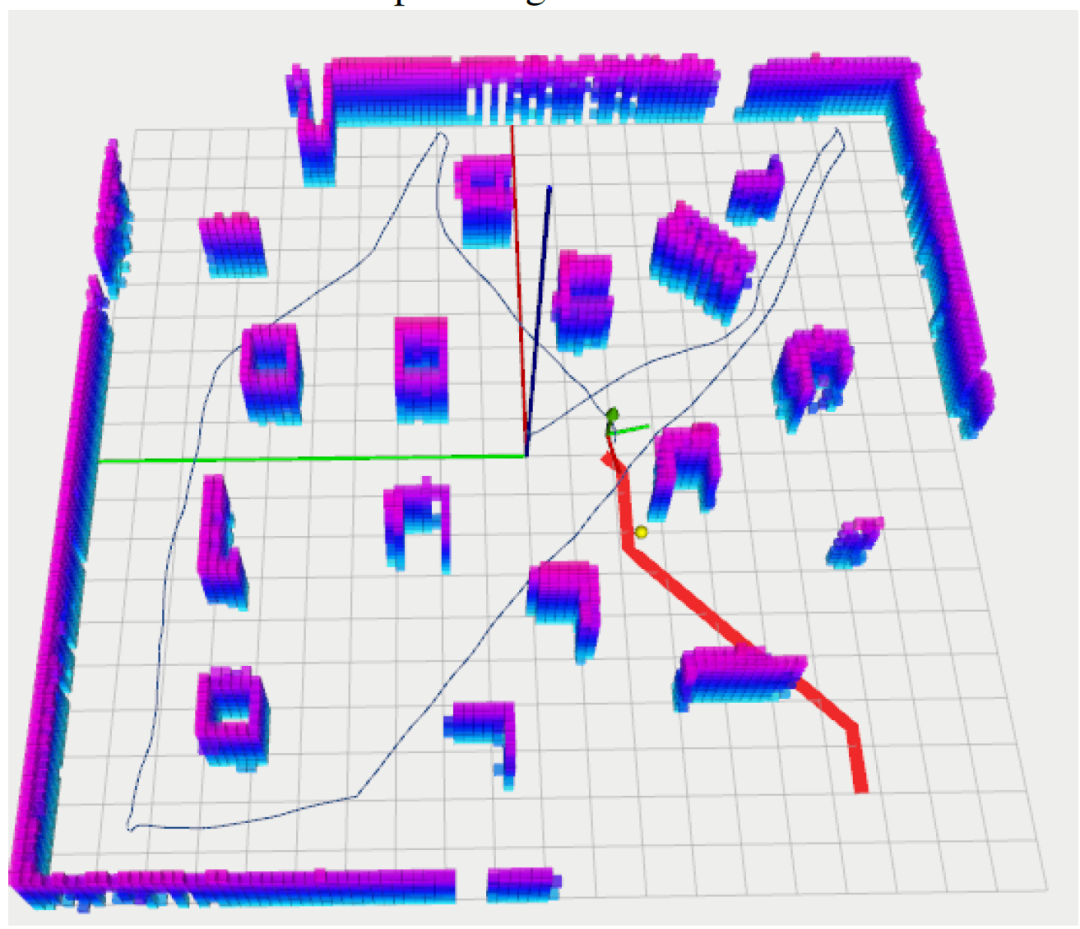
(c) 在未知環(huán)境中單擊并飛行導(dǎo)航(藍(lán)色路徑為已行駛路徑,紅色路徑為從當(dāng)前位置到目的地的全局計(jì)劃路徑)
基于流行的ROS-Gazebo-PX4工具鏈,我們進(jìn)行了幾項(xiàng)改進(jìn),以滿足無(wú)人機(jī)v-SLAM和導(dǎo)航模擬的要求(圖1b)。這些改進(jìn)包括:(a)構(gòu)建仿真空間,(b)定制無(wú)人機(jī)模型,(c)添加立體攝像機(jī)模型,以及(d)配置基于視覺(jué)的控制設(shè)置。在本文的最后,我們演示了一個(gè)端到端的無(wú)人機(jī)導(dǎo)航模擬(圖1c)。
概述
在機(jī)器人世界中,機(jī)器人操作系統(tǒng)(ROS)無(wú)疑是最方便的平臺(tái),它提供了強(qiáng)大的開(kāi)發(fā)工具和軟件包,從驅(qū)動(dòng)程序到最先進(jìn)的算法。此外,許多導(dǎo)航套件都有ROS版本包,集成起來(lái)非常方便。此外,開(kāi)源機(jī)器人模擬器Gazebo是ROS中使用最廣泛的模擬器。我們選擇了廣泛使用的開(kāi)源無(wú)人機(jī)自動(dòng)駕駛儀堆棧PX4。它支持軟件在環(huán)(SITL)仿真。我們的仿真平臺(tái)基于ROS-GAGEBO-PX4工具鏈。
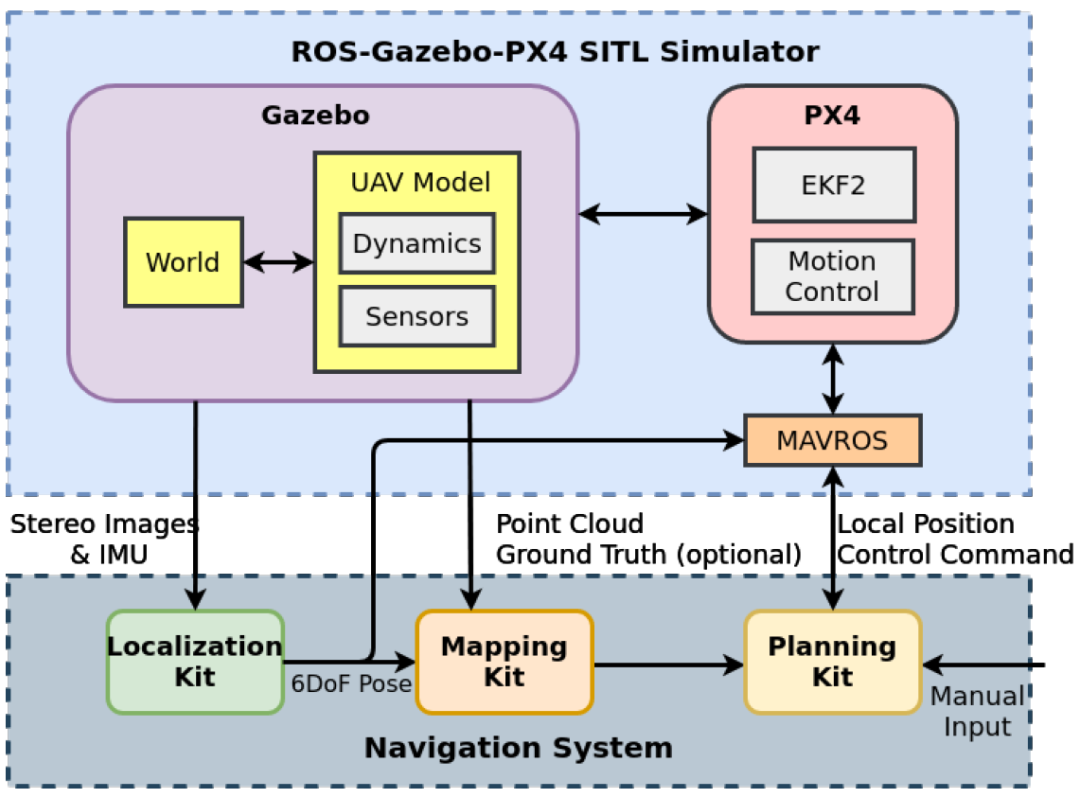
圖2 仿真框架
如圖2所示,上部是SITL模擬器,底部是地圖和導(dǎo)航系統(tǒng)。所有組件通過(guò)不同的ROS主題進(jìn)行協(xié)調(diào)。尤其是導(dǎo)航系統(tǒng)和PX4之間的通信是通過(guò)MAVROS實(shí)現(xiàn)的。
機(jī)載傳感器
在3DR-IRIS模型的基礎(chǔ)上進(jìn)行了改進(jìn),我們添加了一個(gè)深度攝像頭,并定制了IMU傳感器,以支持視覺(jué)慣性姿態(tài)估計(jì)器。這里我們介紹相機(jī)和IMU模型。機(jī)身和IMU的坐標(biāo)定義如圖3所示。
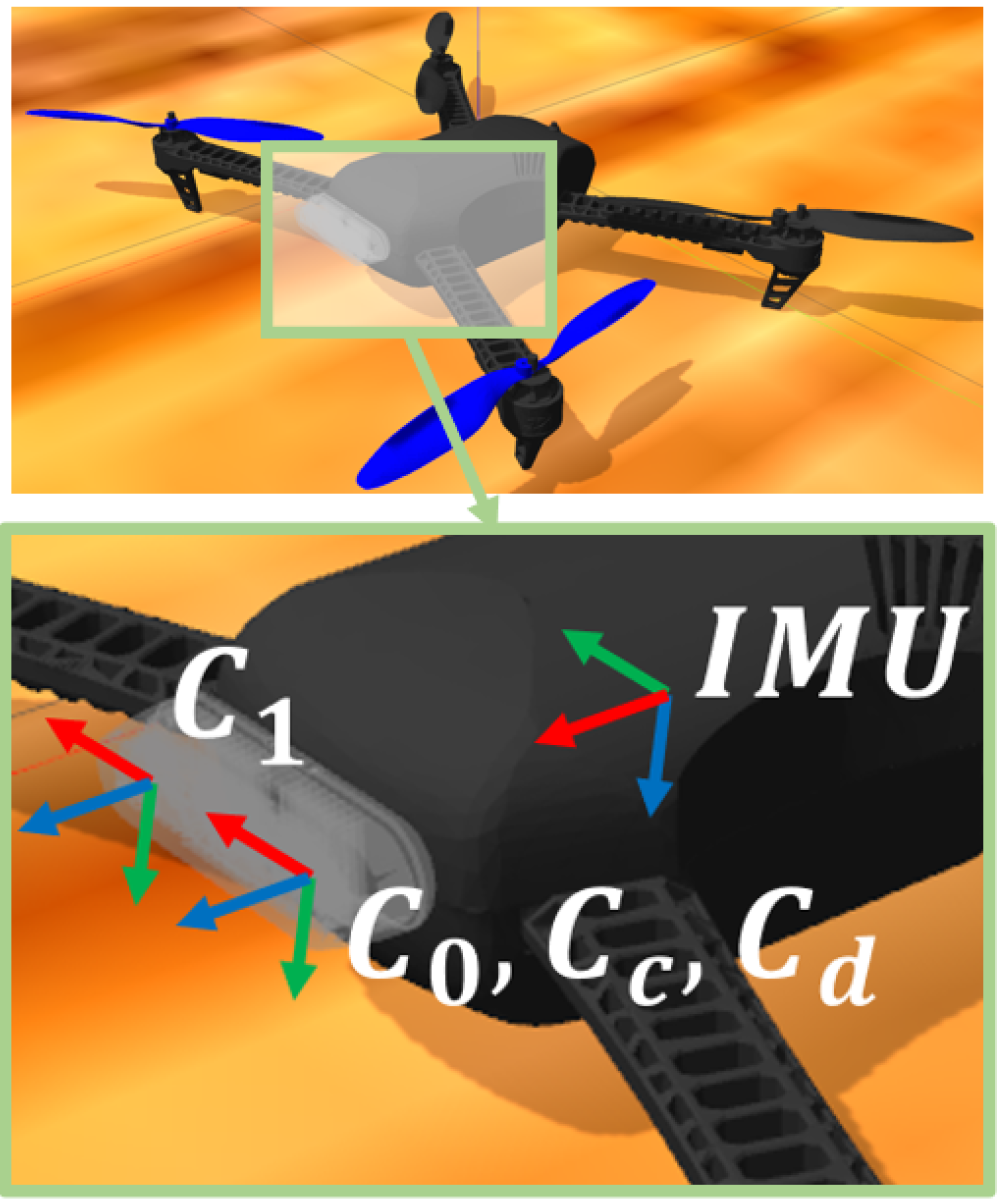
圖3 修改后的3DR-IRIS模型以及視覺(jué)傳感器和IMU的安裝幾何結(jié)構(gòu)(參考框架中的X-Y-Z軸用紅色、綠色和藍(lán)色表示)
模擬空間設(shè)置
首先,我們?cè)谝粋€(gè)20×20米的空空間中添加了障礙物,比如墻壁和盒子。然后,為了滿足v-SLAM模擬的要求,我們?yōu)樗羞@些項(xiàng)目和地平面提供了墻紙,墻紙包含豐富的視覺(jué)特征,如圖4所示。
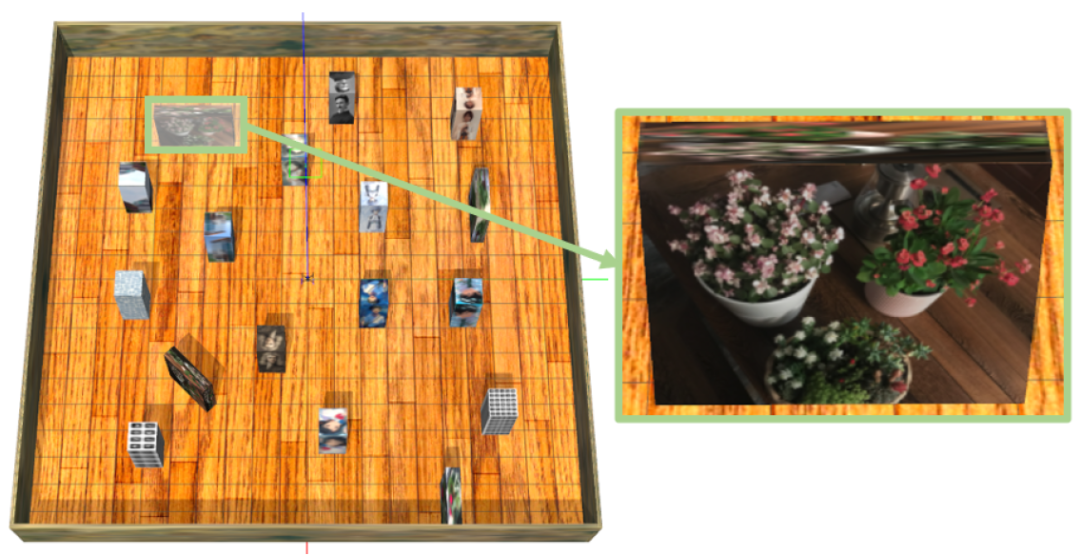
圖4 有障礙物的20×20米模擬空間(墻紙包含豐富的視覺(jué)功能以支持視覺(jué)跟蹤)
定位
我們整合了FLVIS,一種由我們團(tuán)隊(duì)開(kāi)發(fā)的立體視覺(jué)慣性姿態(tài)估計(jì)器,作為定位套件(圖5)。與其他單目v-SLAM方法相比,立體視覺(jué)慣性姿態(tài)估計(jì)器具有魯棒性、準(zhǔn)確性和尺度一致性等優(yōu)點(diǎn)。
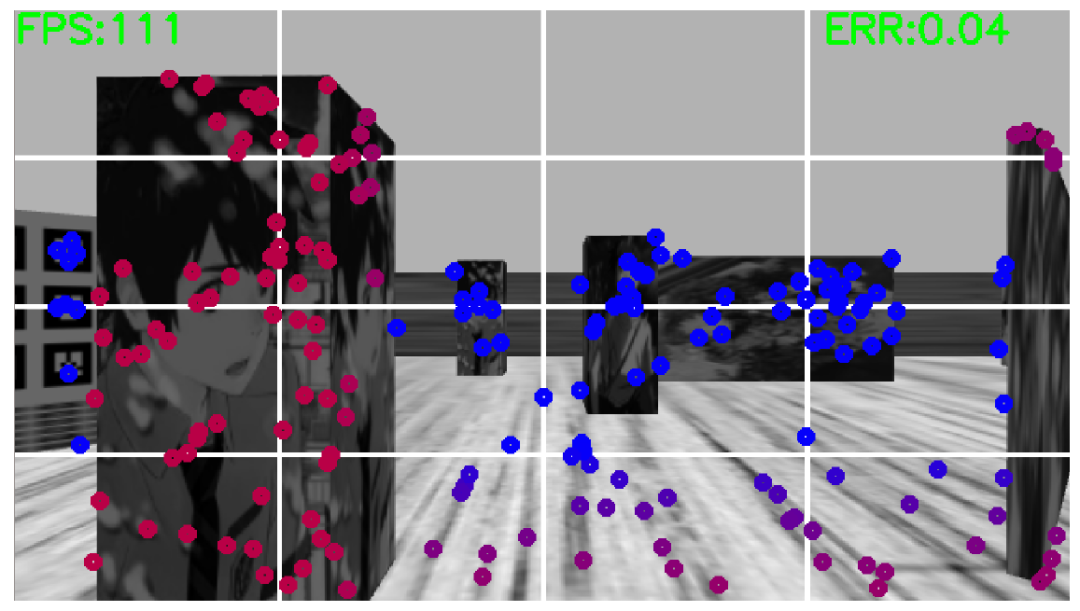
圖5 FLVIS在模擬中,圖像中的標(biāo)記指的是地標(biāo),不同的顏色指的是地標(biāo)和相機(jī)之間的距離
地圖重建
如圖6所示,模擬器中集成了一個(gè)全局本地映射工具包“glmapping”。該地圖工具包是一個(gè)3D占用像素地圖,專為MAV或移動(dòng)機(jī)器人導(dǎo)航應(yīng)用而設(shè)計(jì)。
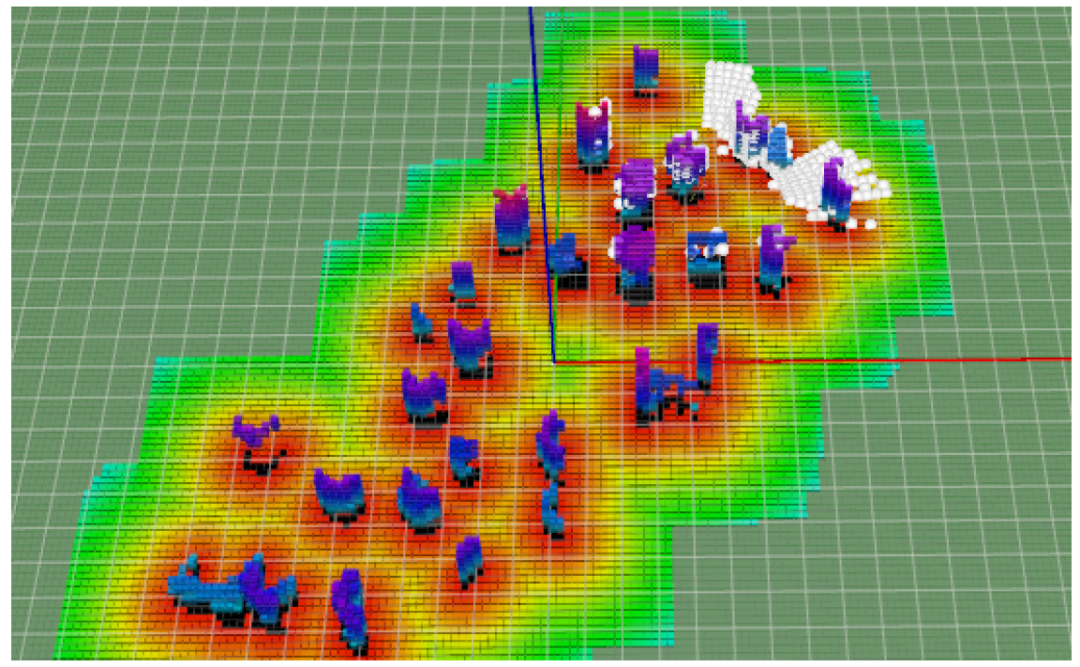
圖6 Rviz中全球/本地/ESFDs地圖的可視化。在全球地圖中,顏色(藍(lán)紫色)表示障礙物的高度;ESFDs地圖的顏色(紅黃綠)表示有符號(hào)的距離值;高亮顯示的白色球體指的是本地地圖
路徑規(guī)劃
我們集成了fuxi Planner作為我們的路徑規(guī)劃工具包。全局規(guī)劃器處理二維全局柵格地圖,以找到最短的二維路徑,并為本地規(guī)劃器輸出本地目標(biāo)。本地規(guī)劃器直接在點(diǎn)云上工作避免與障礙物的潛在碰撞,并為局部目標(biāo)規(guī)劃一條運(yùn)動(dòng)學(xué)上可行的軌跡。
我們控制無(wú)人機(jī)探索20米×20米的未知環(huán)境。這次探索任務(wù)耗時(shí)7分24秒,無(wú)人機(jī)在模擬世界中飛行了82米。然后評(píng)估定位和繪圖工具包的性能。從圖7中可以看出,地面真值路徑和定位工具包中的估計(jì)路徑之間非常一致。我們使用Michael Grupp提供的工具來(lái)評(píng)估定位工具包的準(zhǔn)確性。以均方根誤差(RMSE)形式表示的平移漂移的絕對(duì)軌跡誤差(ATE)為0.3m。
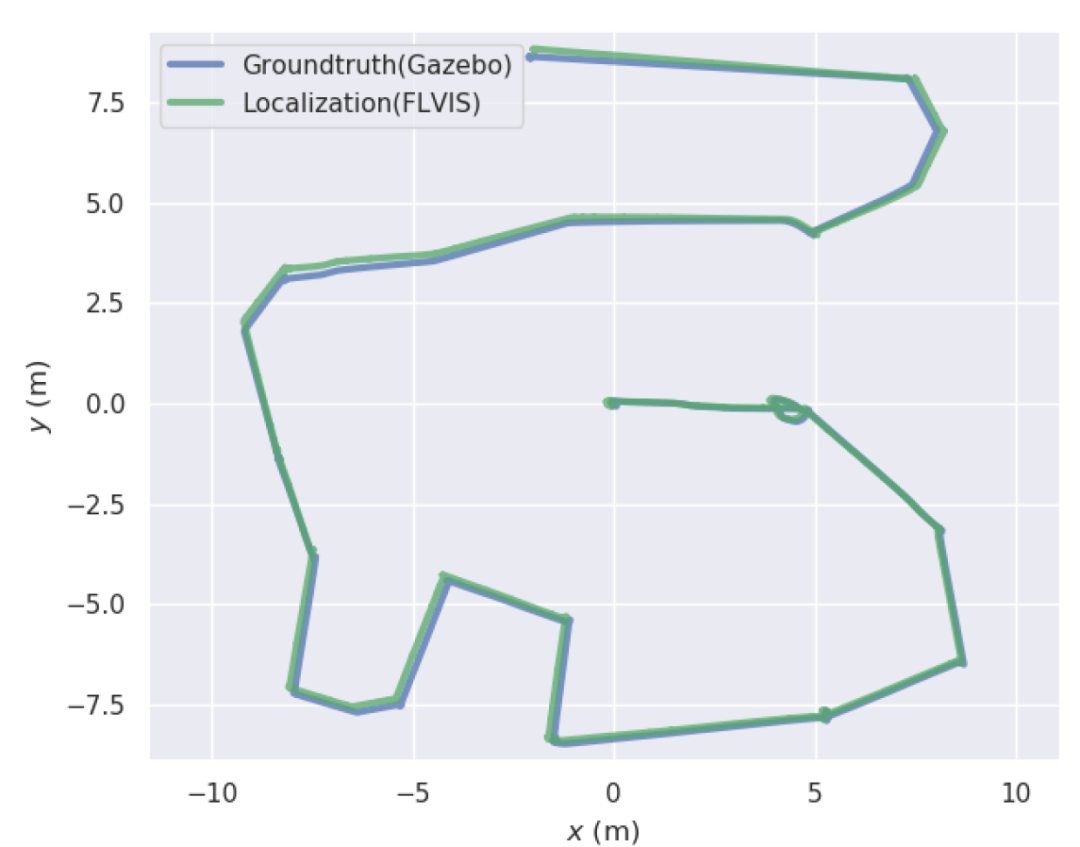
圖7 比較地面真實(shí)情況和定位工具包中的估計(jì)姿勢(shì)
我們捕獲模擬世界的圖像,并從不同的視圖重建地圖。圖8和圖9顯示了它們與地圖細(xì)節(jié)之間的良好一致性。地圖的像素大小為0.2×0.2×0.2米。
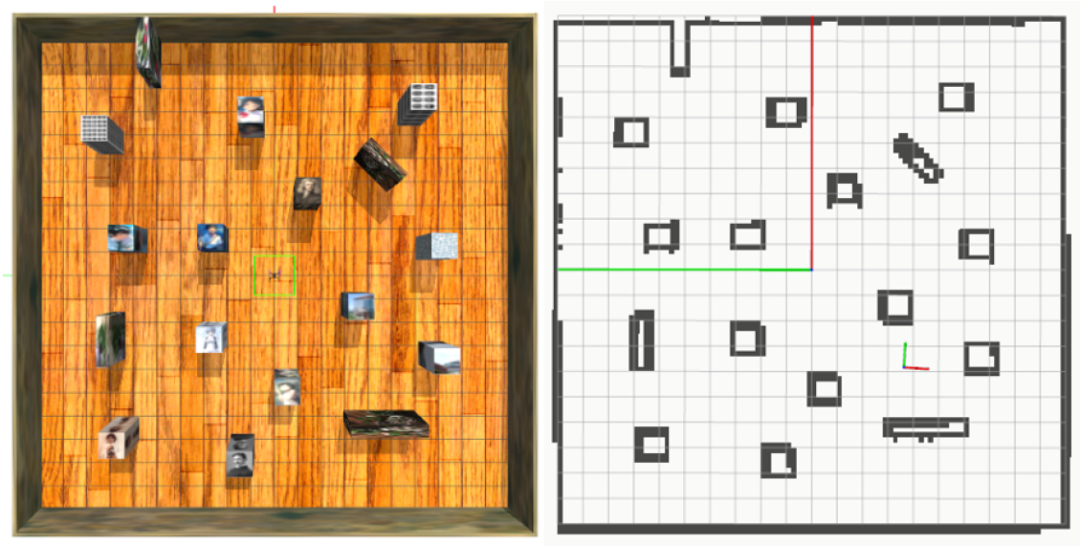
圖8 模擬世界的自頂向下視圖(左)和映射工具包生成的投影二維占用柵格地圖(右)
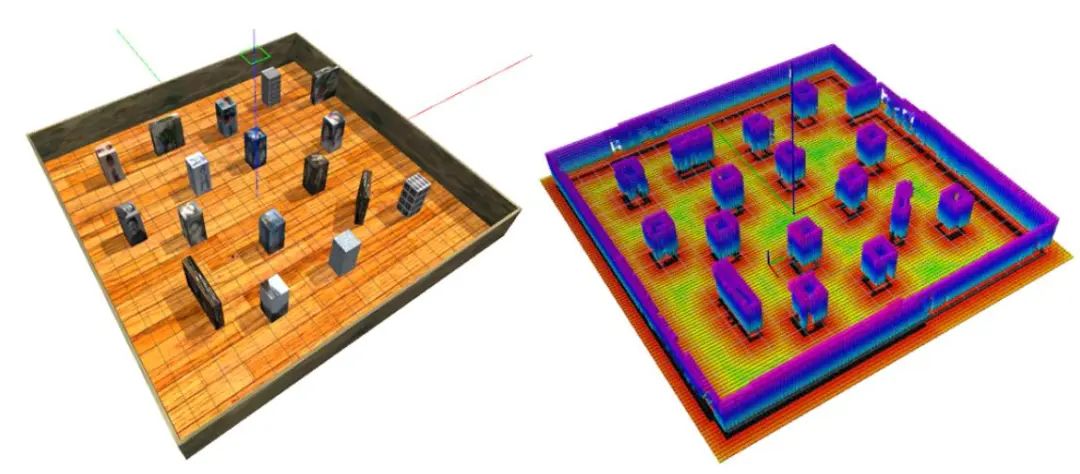
圖9 模擬世界的斜視圖(左)和映射工具包重建的地圖(右)
我們進(jìn)一步將路徑規(guī)劃工具包集成到模擬中,只在地圖上給無(wú)人機(jī)一個(gè)想要的目的地。然后,無(wú)人機(jī)將規(guī)劃路徑,避開(kāi)障礙物,并自動(dòng)飛往目的地。如圖10所示,任務(wù)期間設(shè)置了六個(gè)航路點(diǎn)。無(wú)人機(jī)監(jiān)控環(huán)境,規(guī)劃一條路徑,以完全自動(dòng)地按順序訪問(wèn)這些航路點(diǎn)。飛行路線與最近的障礙物保持安全距離,以避免碰撞。
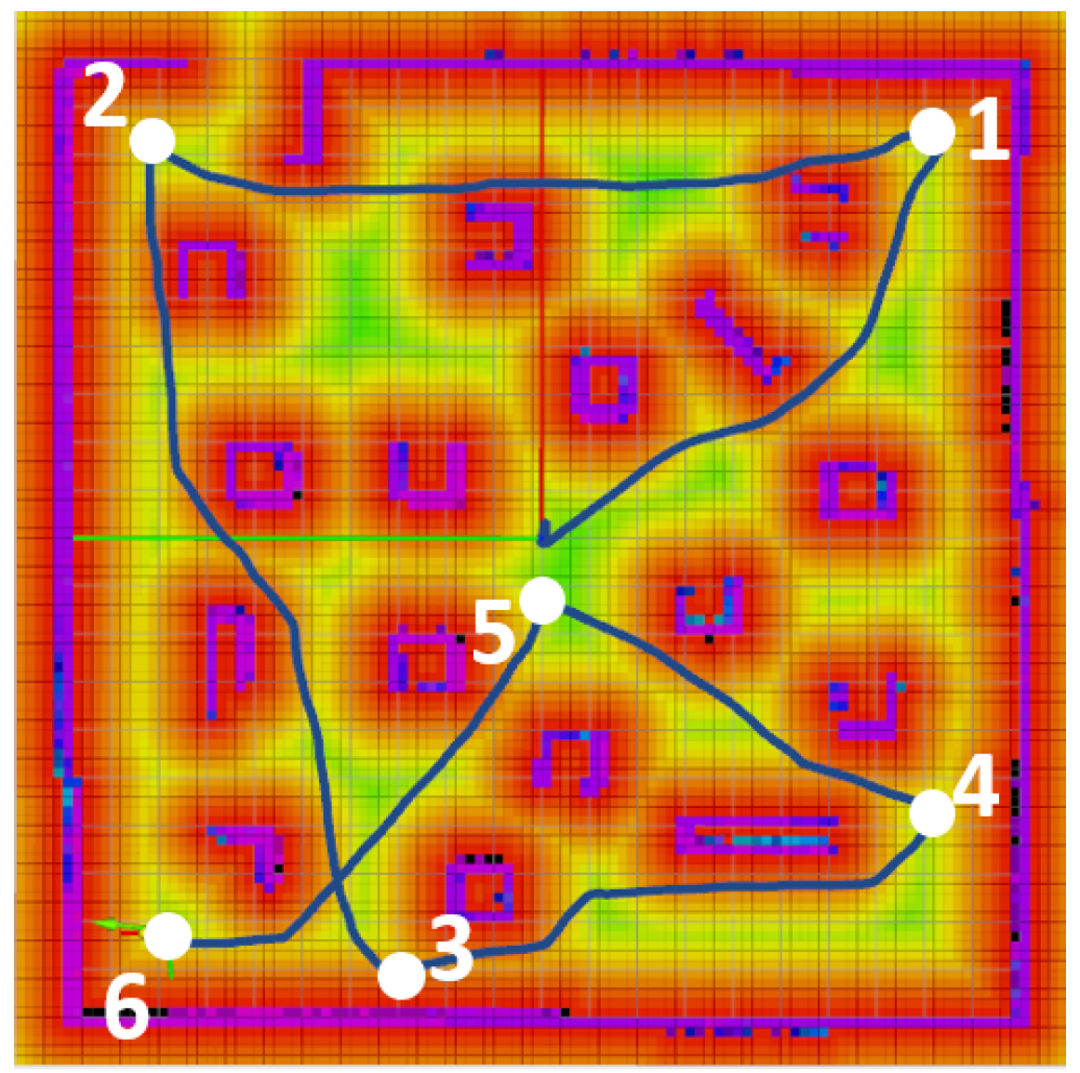
圖10 點(diǎn)擊并飛行導(dǎo)航(藍(lán)色路徑是行進(jìn)路徑,圖像中的白色標(biāo)記是給定的路徑點(diǎn))
飛行結(jié)果表明,該模擬器能夠提供可靠的數(shù)據(jù)流,并為自主功能開(kāi)發(fā)提供了多功能接口。我們提供了所有供公眾使用的套件,以促進(jìn)基于該框架的自主無(wú)人機(jī)系統(tǒng)的進(jìn)一步研究和開(kāi)發(fā)。
原文標(biāo)題:用于視覺(jué)SLAM 和導(dǎo)航的端到端無(wú)人機(jī)仿真
文章出處:【微信公眾號(hào):機(jī)器視覺(jué)智能檢測(cè)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
審核編輯:湯梓紅
-
模擬
+關(guān)注
關(guān)注
7文章
1438瀏覽量
84464 -
導(dǎo)航
+關(guān)注
關(guān)注
7文章
552瀏覽量
43110 -
無(wú)人機(jī)
+關(guān)注
關(guān)注
231文章
10810瀏覽量
186380
原文標(biāo)題:用于視覺(jué)SLAM 和導(dǎo)航的端到端無(wú)人機(jī)仿真
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
低空物流:無(wú)人機(jī)開(kāi)啟未來(lái)配送新篇章
愛(ài)普生M-G370PDS慣性測(cè)量單元在無(wú)人機(jī)導(dǎo)航中的應(yīng)用

愛(ài)普生TG2520SMN溫補(bǔ)晶振在無(wú)人機(jī)導(dǎo)航與通信的應(yīng)用

無(wú)人機(jī)傳感器線圈的設(shè)計(jì)與制造工藝詳解
北斗模塊在無(wú)人機(jī)領(lǐng)域的革新應(yīng)用與未來(lái)展望
革新無(wú)人機(jī)導(dǎo)航:如何重新定義IMU高性能低成本
精準(zhǔn)導(dǎo)航的關(guān)鍵:揭秘GNSS模擬器在無(wú)人機(jī)行業(yè)的核心作用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論