") 如何在軟件中實(shí)現(xiàn)高精度NCO
如何在軟件中實(shí)現(xiàn)高精度NCO

在本系列的第 1 部分中,我們將了解如何基于直接數(shù)字頻率合成 (DDFS) 原理設(shè)計(jì)一個(gè)非常精確的正弦波發(fā)生器,但在浮點(diǎn) DSP 處理器上通過軟件實(shí)現(xiàn)。在第 2 部分中,我們將介紹如何在軟件中實(shí)現(xiàn)高精度 NCO。
構(gòu)建一個(gè)具有與最好的模擬振蕩器相似或更好的失真性能的高精度交流音調(diào)發(fā)生器,如最著名的惠普分析儀或應(yīng)用筆記 AN-1323 中所述,即使專用于音頻,也不是一件容易的事頻譜(直流至 20 kHz 范圍)。然而,如前所述,完整的軟件實(shí)現(xiàn),使用嵌入式處理器的足夠算術(shù)精度執(zhí)行相位計(jì)算 (ωt) 和正弦函數(shù) (sin(ωt)) 近似,當(dāng)然可以幫助最大限度地減少量化副作用、噪聲、以及由此產(chǎn)生的馬刺。這意味著圖 2 中的所有 NCO 功能塊都轉(zhuǎn)換為代碼行(沒有 VHDL!
對于相位到正弦幅度轉(zhuǎn)換引擎,完整的 LUT 方案或任何變化都需要過多的內(nèi)存或過多的插值操作才能實(shí)現(xiàn)完美的正弦一致性。相反,用于正弦逼近的多項(xiàng)式方法通過允許使用成本非常低的通用 DSP,提供了非常好的復(fù)雜性與精度之間的折衷。多項(xiàng)式級數(shù)展開也非常有吸引力,因?yàn)樗鄬唵危⑶夷軌蛟谶x擇冪級數(shù)類型時(shí)提供充分的靈活性,并為給定的精度定制算法。它不需要大的存儲空間、少于 100 行 SHARC DSP 裝配線,并且只需要幾個(gè) RAM 位置來存儲多項(xiàng)式系數(shù)和變量,因?yàn)檎抑祪H在采樣時(shí)刻計(jì)算。
首先,正弦逼近函數(shù)的明顯選擇是使用具有適當(dāng)階數(shù)的直線 Taylor/MacLaurin 冪級數(shù)來滿足目標(biāo)精度。然而,由于冪級數(shù)往往在端點(diǎn)處失效,因此在執(zhí)行任何多項(xiàng)式評估之前,必須將參數(shù)輸入范圍縮小到更小的區(qū)間。在沒有參數(shù)范圍縮減的情況下,只有非常高階的多項(xiàng)式才能支持函數(shù)域上的高精度,例如 [–π, +π]。因此,需要對初等函數(shù)應(yīng)用一些變換以得到簡化參數(shù),例如 sin(|x|) = sin(f + k × π/2) 和 sin(f) = sin(x – k × π/ 2) 0≤f《π/2。因此,應(yīng)特別注意三角函數(shù)以避免減法抵消,這將導(dǎo)致嚴(yán)重的精度損失并產(chǎn)生災(zāi)難性的結(jié)果,尤其是在算術(shù)精度較差的情況下。在我們的例子中,當(dāng)相位輸入較大或接近 π/2 的整數(shù)倍時(shí),可能會發(fā)生這種情況。
除了周期性和模 2π 重復(fù)之外,sin(x) 函數(shù)的對稱特性還可用于進(jìn)一步減小逼近范圍。鑒于正弦函數(shù)在區(qū)間 [0, 2π] 中關(guān)于點(diǎn) x = π 反對稱,因此可以使用以下關(guān)系:

對于區(qū)間 [0, π/2] 中的 x,這進(jìn)一步減小了角度輸入逼近范圍。進(jìn)一步將參數(shù)減少到更小的區(qū)間(如 [0, π/4] 以提高準(zhǔn)確性)效率不高,因?yàn)樗枰瑫r(shí)評估正弦和余弦函數(shù),這由常見的三角關(guān)系決定:sin(a+b ) = sin(a) × cos(b) + cos(a) × sin(b),值得產(chǎn)生正交音。
ADI 公司的 ADSP-21000 系列應(yīng)用手冊第 1 卷描述了一種幾乎理想的(用于嵌入式系統(tǒng))正弦逼近函數(shù),該函數(shù)基于為第一個(gè) ADI DSP 浮點(diǎn)處理器(即 ADSP-21020)編寫的優(yōu)化冪級數(shù),它基本上是一個(gè)SHARC核心。sin(x) 的這種實(shí)現(xiàn)依賴于 Hart 等人 4 發(fā)表并由 Cody 和 Waite5 改進(jìn)的極小極大多項(xiàng)式近似,用于浮點(diǎn)運(yùn)算,以減少舍入誤差并避免如前所述的取消的發(fā)生。minimax 方法依賴于 Chebyshev 多項(xiàng)式和 Remez 交換算法來確定所需最大相對誤差的系數(shù)。如圖 3 中的 MATLAB 所示,
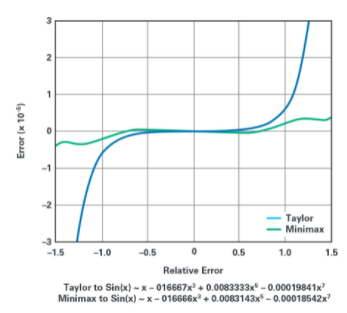
圖 3. 與定義在 0 附近的 Taylor-MacLaurin 方法不同,極小極大正弦近似方法在 [–π/2 到 +π/2] 區(qū)間內(nèi)最小化和均衡最大相對誤差。
雖然所有計(jì)算都可以使用 32 位定點(diǎn)算術(shù)執(zhí)行,但多年來,最常見和最方便的數(shù)學(xué)計(jì)算格式一直是 IEEE 754 浮點(diǎn)標(biāo)準(zhǔn),尤其是在處理長數(shù)時(shí)。當(dāng)時(shí)根本沒有單片浮點(diǎn)DSP處理器,只有ADSP-3212和ADSP-3222等簡單的浮點(diǎn)乘法器和ALU計(jì)算IC。這種格式取代了計(jì)算機(jī)行業(yè)的大多數(shù)專有格式,并成為所有 SHARC DSP 處理器的原生格式,包括單精度 32 位、擴(kuò)展精度 40 位以及最近用于 ADSP-SC589 的雙精度 64 位和 ADSP-SC573。
SHARC 40 位擴(kuò)展單精度浮點(diǎn)格式及其 32 位尾數(shù)為該正弦波生成應(yīng)用提供了足夠的精度 (u 2–32) 并保持相等,Cody 和 Waite 表明 15 階多項(xiàng)式是合適的對于 32 位的整體精度,在 [0 到 +π/2] 輸入域上具有均勻分布的誤差。最小化運(yùn)算次數(shù)并保持準(zhǔn)確性的最后調(diào)整是實(shí)現(xiàn)多項(xiàng)式計(jì)算的霍納規(guī)則,這是一種在一個(gè)點(diǎn)上計(jì)算多項(xiàng)式的快速取冪方法,例如:

R1 到 R7 是多項(xiàng)式級數(shù)的 Cody 和 Waite 系數(shù),只需 8 次乘法和 7 次加法即可計(jì)算任何輸入?yún)?shù) ε[0, π/2] 的正弦函數(shù)。以匯編子程序形式編寫的完整 sin(x) 近似代碼在 SHARC 處理器上大約需要 22 個(gè)內(nèi)核周期執(zhí)行。原始匯編子程序被修改為在獲取 40 位多項(xiàng)式浮點(diǎn)系數(shù)時(shí)同時(shí)執(zhí)行雙內(nèi)存訪問,以節(jié)省六個(gè)周期。
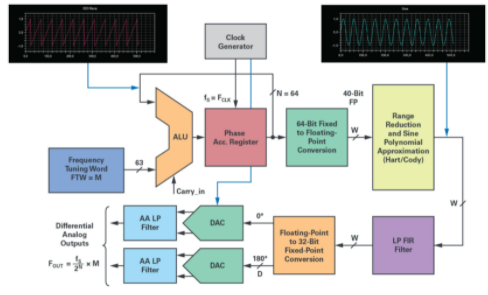
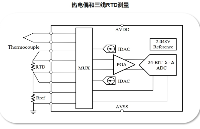
圖 4. 軟件 DDS 簡化框圖給出了數(shù)據(jù)算術(shù)格式和處理元件之間各種量化步驟的位置。
NCO 64 位相位累加器本身使用雙精度二進(jìn)制補(bǔ)碼小數(shù)格式的 SHARC 32 位 ALU 來執(zhí)行。具有內(nèi)存更新的完整相位累加器執(zhí)行需要 11 個(gè)內(nèi)核周期,因此,每個(gè) NCO 輸出樣本在大約 33 個(gè)內(nèi)核周期內(nèi)生成。
圖 4 中的圖表顯示了基于軟件 DSP 的 NCO 的功能塊實(shí)現(xiàn),其中參考了每個(gè)階段的算術(shù)格式精度。此外,信號模擬重構(gòu)還需要一個(gè)或兩個(gè) DAC 及其模擬抗混疊濾波器電路,以實(shí)現(xiàn)完整的 DDFS。處理鏈的關(guān)鍵要素是:
64位相位累加器(SHARC ALU雙精度加法溢出);
64 位小數(shù)定點(diǎn)到 40 位 FP 轉(zhuǎn)換塊;
范圍縮減塊 [0 到 + π/2] 和象限選擇(Cody 和 Waite);
用于相位幅度轉(zhuǎn)換的正弦逼近算法 (Hart);
–1.0 到 +1.0 范圍內(nèi)的 sin(x) 重建和歸一化階段;
必要時(shí)進(jìn)行 LP FIR 濾波器和 sin(x)/x 補(bǔ)償;
以及 40 位 FP 到 D 位定點(diǎn)轉(zhuǎn)換和縮放功能,以適應(yīng) DAC 數(shù)字輸入。
可以在 NCO 的輸出端放置一個(gè)可選的數(shù)字低通濾波器,以消除可能折疊在感興趣頻帶中的任何雜散和噪聲。可選地,該濾波器可以根據(jù)為模擬重建選擇的 DAC 提供插值和/或逆 sin(x)/x 頻率響應(yīng)補(bǔ)償。這種低通 FIR 濾波器可以使用 MATLAB 濾波器設(shè)計(jì)器工具來設(shè)計(jì)。例如,假設(shè)采樣頻率為 48 kSPS,直流至 20 kHz 帶寬,帶內(nèi)紋波為 0.0001 dB,帶外衰減為 –150 dB,則可以使用 40 位浮點(diǎn)實(shí)現(xiàn)高質(zhì)量等紋波濾波器系數(shù)。只有 99 個(gè)濾波器系數(shù),它的總執(zhí)行時(shí)間將在單指令、單數(shù)據(jù) (SISD) 單計(jì)算單元模式下消耗大約 120 個(gè) SHARC 內(nèi)核周期。數(shù)字濾波后,DMA 使用其中一個(gè) DSP 同步串行端口將計(jì)算的樣本對發(fā)送到 DAC。為了獲得更好的速度性能,鏈接 DMA 操作也可以與大型乒乓存儲器緩沖區(qū)一起支持按塊操作進(jìn)行處理。例如,塊數(shù)據(jù)大小可以等于 FIR 數(shù)據(jù)延遲線的長度。
NCO 的最終調(diào)整以獲得最佳 SFDR
如前所述,NCO 受到雜散的影響主要是由于相位累加器輸出的截?cái)啵⑶以谳^小程度上是由于對通過計(jì)算或制表獲得的正弦值進(jìn)行的幅度量化造成的。相位截?cái)鄬?dǎo)致的誤差通過相位調(diào)制(鋸齒波)在載波頻率附近產(chǎn)生雜散,而正弦幅度量化導(dǎo)致諧波相關(guān)的雜散,盡管長期以來被認(rèn)為是隨機(jī)誤差和噪聲。今天,如 Henry T. Nicholas 和 H. Samueli 的技術(shù)論文 7 中所描述的,相位累加器的操作在數(shù)學(xué)上是眾所周知的。經(jīng)過全面分析,提出了一個(gè)模型,將相位累加器視為離散相位樣本置換發(fā)生器,從中可以預(yù)測頻率雜散。
(其中 GCD 是最大公約數(shù))由頻率調(diào)諧字 M 的最右邊位位置 L 確定,如圖 4 所示。因此,L 的值定義了序列類別,每個(gè)類別共享自己的一組相位組件,但根據(jù)排列
比率。在時(shí)域中生成的這些截?cái)嘞辔粯颖拘蛄杏糜谕ㄟ^ DFT 確定頻域中每個(gè)雜散線的相應(yīng)位置和幅度。這些序列還表明 M (FTW) 的奇數(shù)值表現(xiàn)出最低頻率雜散的幅度,并建議對相位累加器進(jìn)行簡單修改,以滿足這些最小條件,只需將 1 LSB 添加到 FTW。這樣,無論 M 值和相位累加器的初始內(nèi)容如何,相位累加器輸出序列都被迫始終具有相同的 2N 個(gè)相位元素。然后,最差雜散音幅度的電平降低 3.922 dB,等于 SFDR_min (dBc) = 6.02 × W。 Nicholas 改進(jìn)的相位累加器為 NCO 帶來了幾個(gè)好處,
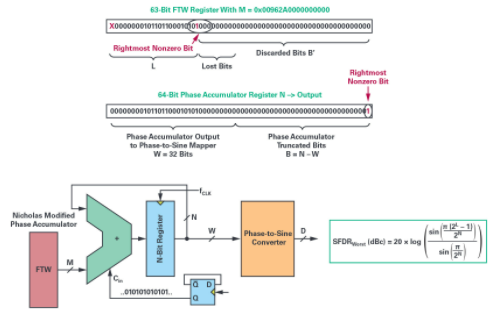
圖 5. FTW 最右邊的非零位的位置設(shè)置了理論上的 SFDR 最壞情況水平。Nicholas 改進(jìn)的相位累加器解決了任何 N 值的問題,并使 NCO 的 SFDR 最大化。
因此,對于 32 位的輸出相位字 W,由于相位截?cái)喽鴮?dǎo)致的最大雜散幅度被限制為 –192 dBc!正弦樣本值的有限量化也會導(dǎo)致另一組頻率雜散,通常將其視為噪聲,并通過眾所周知的關(guān)系 SNRq(dB) = 6.02 × D + 1.76 進(jìn)行估計(jì)。由于相位到正弦幅度轉(zhuǎn)換算法階段的近似誤差,這必須添加到寄生元素中,然而,考慮到在選擇相位到正弦近似算法和計(jì)算的精度。
這些結(jié)果表明,我們的軟件正弦 NCO 的線性度和噪聲都處于理論水平,遠(yuǎn)遠(yuǎn)超出了測試市場上大多數(shù)高精度 ADC 所需的閾值。仍然需要找到信號鏈中最后但最關(guān)鍵的元素:重建 DAC 及其互補(bǔ)模擬抗混疊濾波器和相關(guān)的驅(qū)動(dòng)器電路,可以滿足預(yù)期的性能水平。
審核編輯:郭婷
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
54文章
8655瀏覽量
149521 -
濾波器
+關(guān)注
關(guān)注
162文章
8121瀏覽量
181592 -
dac
+關(guān)注
關(guān)注
43文章
2397瀏覽量
193338
發(fā)布評論請先 登錄
如何在狹小空間實(shí)現(xiàn)0.25°高精度尋北?

探索直線電機(jī)模組實(shí)現(xiàn)高精度的四大要素

方案分享 | 高精度時(shí)間同步技術(shù)的實(shí)現(xiàn)與應(yīng)用
如何實(shí)現(xiàn)高精度、高可靠性的隔離式電流/電壓測量?如何在緊湊布局中平衡性能與成本?如何應(yīng)對EMI干擾與安
白皮書:在HMI應(yīng)用中實(shí)現(xiàn)高精度電容式觸摸傳感器
UWB高精度定位技術(shù)在智能倉儲中的應(yīng)用
請問ADS1263能做到多高精度?實(shí)現(xiàn)高精度應(yīng)該注意什么?
音頻信號采集為什么要用專用的CODEC來實(shí)現(xiàn),普通高精度高采樣率ADC可以嗎?
物聯(lián)網(wǎng)系統(tǒng)中高精度RTK定位方案的實(shí)現(xiàn)_高精度定位模塊

數(shù)字振蕩器的實(shí)現(xiàn)要求有哪些
VS高精度電壓傳感器
探索UWB技術(shù)的獨(dú)特優(yōu)勢:實(shí)現(xiàn)高精度定位
如何在MSP430?上實(shí)現(xiàn)內(nèi)置振蕩器的高精度定時(shí)器

如何在激光雷達(dá)和接近檢測中利用高速比較器提高精度
國產(chǎn)AFE可兼容ADS1248助力工業(yè)實(shí)現(xiàn)超高精度的模擬性能





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論