 AVP關鍵技術,UWB概念淺析
AVP關鍵技術,UWB概念淺析

自動駕駛與自動泊車
在 SAE (Society of Automotive Engineers 美國汽車工程師學會) 的定義中,自動駕駛被劃分為 Level 0 到 Level 5 共六個等級:
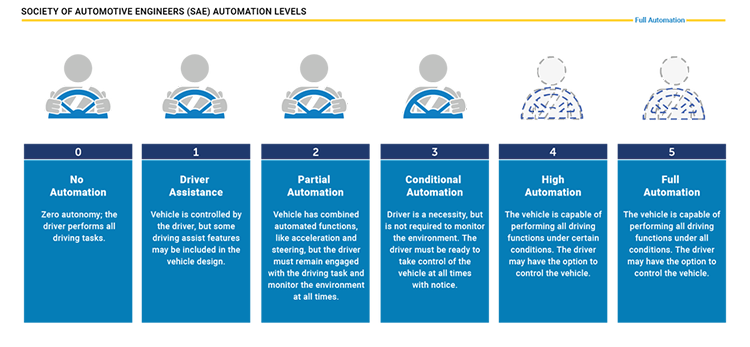
Level 0:無自動化? 車輛無自動駕駛功能,需要駕駛員完全手動駕駛。
Level 1:駕駛輔助? 車輛由駕駛員控制,但具備一些初級駕駛輔助功能。
Level 2:部分自動化? 車輛具備了自動駕駛的多項功能,但仍需由駕駛員主導駕駛。
Level 3:有條件自動化? 車輛具備自動駕駛功能,駕駛員的重要性已經降低,但駕駛員仍需時刻準備接管車輛控制權。
Level 4:高度自動化? 車輛在大部分場景下都可以實現自動駕駛,駕駛員在大部分場景下無需關注車輛駕駛情況。
Level 5:完全自動化? 車輛在所有場景下都可以實現自動駕駛,駕駛員在所有場景下無需關注車輛駕駛情況。
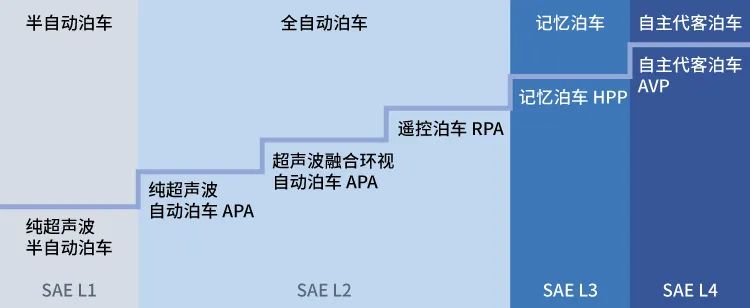
在自動駕駛領域中,自動泊車因其低速、封閉或半封閉空間、場景相對固定等因素,成為了自動駕駛領域最容易落地的場景。根據自動化程度的不同,自動泊車被劃分為半自動泊車、全自動泊車、記憶泊車、自主代客泊車四種階段:
半自動泊車
Semi-Automatic Parking Assist, S-APA?
對應 SAE Level 1,是基于車輛四周布置的超聲波傳感器實現車位感知,需要駕駛員實時監督并控制車速,操作流程復雜且用戶體驗較差。
全自動泊車
Full-Automatic Parking Assist, F-APA?
對應 SAE Level 2,可實現對車輛橫向和縱向的自動控制,但需要駕駛員對車輛進行持續監督并隨時準備接管。全自動泊車按照傳感器組成的不同,分為基于超聲波雷達的全自動泊車和升級版基于超聲波與環境視覺融合的全自動泊車,后者有更強的環境感知能力,能夠應對更多的停車場景。全自動泊車還有一種產品形態是遙控泊車 ( Remote Parking Assist, RPA ),在 APA 的基礎上增加了遙控部分,允許駕駛員在車外可視范圍內使用遙控裝置控制車輛,能夠避免尷尬的停車后打不開車門的場景。
記憶泊車
Home-Zone Parking Pilot, HPP?
對應 SAE Level 3,記憶泊車建立在全自動泊車基礎之上,結合 SLAM ( Simultaneous Localization and Mapping, 即時定位與地圖構建 ) 技術,根據學習駕駛員的下車位置、停車地點、泊車路徑等,建立常用泊車場景的環境特征地圖,以便之后復現駕駛員的泊車路線來替代駕駛員完成停車場景最后一段距離的低速駕駛與車輛泊入。
自主代客泊車
Automated Valet Parking, AVP?
對應 SAE Level 4,顯著特點是無需駕駛員在車內,依靠更精準的感知、更強大的算力、更先進的算法,自主代客泊車可實現智慧停車場內的低速自動駕駛、自主避障、智能搜索車位和自主車輛泊入泊出。駕駛員在智慧停車場指定下客點下車后,通過移動終端下達泊車指令,車輛接收到指令后可自動行駛到停車位,無需駕駛員的操縱與監控;駕駛員通過移動終端下達取車指令,車輛接收到指令后可從停車位自動行駛至指定上客點;若多輛車同時接收到泊車指令,可實現多車動態的自動等待進入停車位;車輛自動行駛過程中,遵循停車場運營方所制定的場內交通規則。
AVP關鍵技術
在當前 SAE Level 4 其它場景落地還需要很長的時間,而 AVP 作為當前自動泊車場景中的天花板,同時也是目前業內公認的將最先實現商業化應用的 SAE Level 4 級別的自動駕駛場景,AVP 能夠實現全自動的代客泊車功能,幫助駕駛員在停車場景中節省大量時間。汽車電子巨頭 BOSCH 為我們描繪了自主代客泊車的實現場景:
從中我們可以看出 AVP 的關鍵功能:
01
機車互聯
手機與汽車的互聯,主要包含:車載控制器與網關,T-BOX ( Telematics BOX, 遠程信息處理器 ) ,云端后臺服務器,手機 App。駕駛員通過手機 App 訪問云端后臺服務器,建立與車輛 T-BOX 聯系,從而激活 AVP 功能,控制車輛開始自主代客泊車模式。
02
尋找車位
車輛進入停車場,并自動尋找車位,是 AVP 功能的核心。在沒有任何控制的情況下,車輛在停車場內自動且準確地尋找到可停的車位,是 AVP 的重點和難點。尋找車位的方案一種讓車輛在停車場內邊行駛邊搜索車位,一旦搜索到可用的車位,就泊入車位:另一種是在停車場內安裝其它設備,將可用的車位信息和障礙物等信息發送給車輛,車輛將結合這些,規劃好行駛路徑,直接開到終點。值得一提的是,這種車輛與停車場交互信息的這種方式,可以實現多車路線規劃,避免排隊的情況發生。
03
泊入車位
車輛到達規劃車位后,進入自動泊車入位狀態,車輛通過規劃的泊入路徑自動完成車位泊入。
04
召喚車輛
駕駛員通過手機 App 發出召喚指令,車輛從車位自動駛出,行進至指定位置,至此 AVP 全過程完成。召喚車輛可以看作是自動泊車的相反過程。
UWB概念淺析
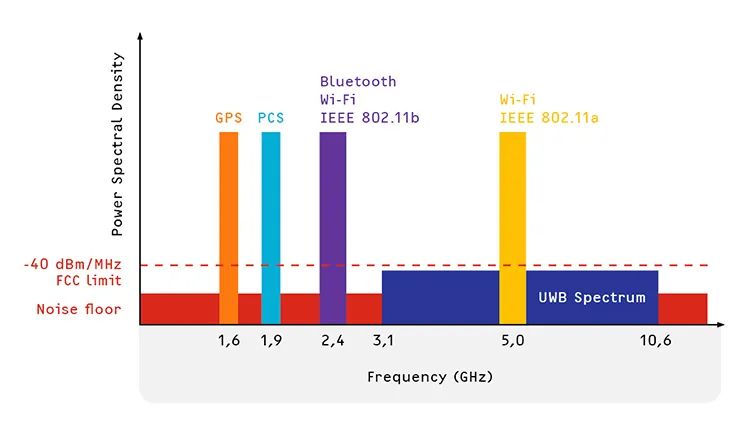
UWB ( Ultra-wideband 超寬帶 ),與藍牙或 Wi-Fi 本質上都是無線電波,但 UWB 與其它無線傳輸技術完全不同,它是一種基于脈沖的無線載波通信技術,利用納秒級的非正弦波窄脈沖進行數據傳輸,其所占的頻譜范圍很寬 ( 3.1 到 10.6 GHz )。相比之下,藍牙的頻譜范圍只有 2.402 到 2.480 GHz;而 Wi-Fi 只是在 2.4 GHz 和 5 GHz 下分別有一些很窄的頻譜。
與藍牙和 Wi-Fi 的連續波信號不同,UWB 發射的是脈沖信號,這使它具備了兩個獨特的優勢:精準定位和高安全性。UWB 與當前的其它通訊技術相比其抗干擾能力強、低功率、超大帶寬且理論上成本更低。

如今 UWB 技術在逐漸覆蓋智慧城市與交通、智能建筑與工業、智慧零售、智能家居與消費等領域,相信在不遠的將來,UWB 技術將得到更加廣泛的應用。
UWB 在汽車領域的應用
UWB 憑借其獨特優勢,很早就受到了汽車工程師們的關注,當前越來越多的汽車廠商開始重視該技術,UWB 在汽車領域的應用主要有:
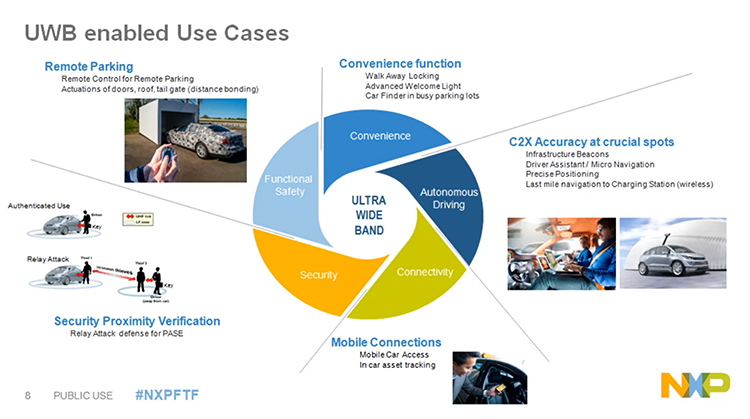
遠程泊車?遙控停車、開關車門車窗、踢腳開后備箱。
安全驗證?防中繼攻擊的無鑰匙進入。
機車互聯?手機與汽車互聯,車內資產跟蹤。
車輛聯網?基礎設施信標、駕駛輔助/微導航、精準定位、自主充電。
便捷功能?離車自鎖、智能迎賓燈、手機尋車。
當前 UWB 在車輛上的應用,主要是 PEPS ( Passive Entry & Passive Start 無鑰匙進入無鑰匙啟動,詳情參考PEPS的前世今生與未來 ),基于 UWB 精準定位的智能迎賓模式,以及將 UWB 作為雷達應用的尾門踢腳傳感器。而更有想象空間的其實是基于 UWB 厘米級精準定位特性的 AVP 自主代客泊車。
UWB 技術為 AVP 賦能
CCC ( Car Connectivity Consortium ) 是一個全球范圍內致力于智能手機與汽車連接的跨行業科技聯盟。
Fira ( Fine ranging consortium ) 是一個致力于利用 UWB 技術安全精細測距和定位功能提升用戶體驗的科技聯盟。
目前幾乎所有主流的手機廠和汽車廠都加入了 CCC 聯盟和 FiRa 聯盟,而這兩個聯盟的主要目的就是讓車和手機之間能夠通過 UWB 實現連接。也就是說,今后這些聯盟成員的手機和汽車基本都會內置 UWB 模塊。有了 UWB 模塊,除了讓手機和車輛可以相互感知位置外,還可以通過給停車場加裝 UWB 模塊,來實現停車場感知車輛位置。這就為 AVP 的實現打好了基礎,這也是為什么目前業內將自動泊車場景中的天花板 AVP 公認為將最先實現商業化應用的 SAE Level 4 級別的自動駕駛場景的原因。
AVP 技術路線主要分為改車派和停車場派,改車派通過增加車輛傳感器來提升車輛自身的感知能力;停車場派則是通過對停車環境的改造,來實現不同車型的自主泊車。
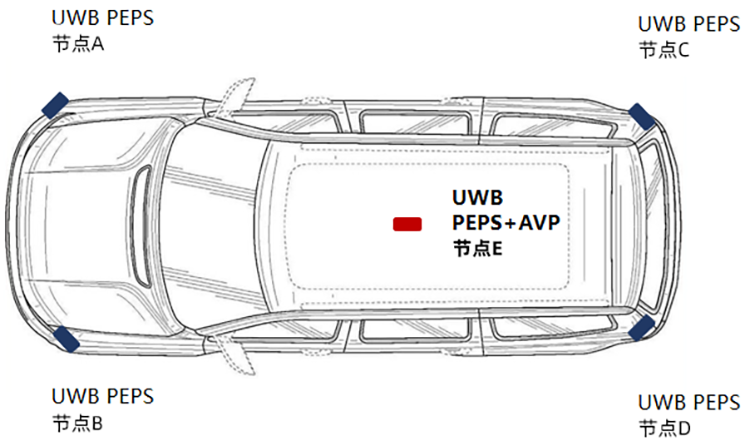
UWB 室內實時精準定位技術在停車場派 AVP 中變得不可或缺,首先車輛使用 UWB 來實現 PEPS 變成了業內共識,其次使用 UWB 技術來實現 AVP 可以復用車輛 PEPS 的 UWB 模塊,這使得汽車廠無需增加過多的額外成本,只需運營方在停車場基礎設施中加裝 UWB 模塊就可實現。汽車廠通常在前大燈和尾燈共放置 4 個 UWB PEPS 模塊,在車頂放置 1 個 UWB 模塊,車頂的 UWB 模塊既可以接收車內的 UWB 信號,也可以接收車外的 UWB 信號。利用車頂的 UWB 模塊接收停車場內 UWB 基站的高精度定位信號,以此來增加車輛執行 AVP 時的高精度定位能力。
信馳達致力于基于 UWB 的 PEPS/AVP 方案提供
作為深圳老牌無線物聯網企業,信馳達致力于為客戶提供基于 UWB 的無鑰匙進入無鑰匙啟動方案,以及基于 UWB 的自主代客泊車方案,歡迎各大車廠咨詢合作。
審核編輯 :李倩
-
UWB
+關注
關注
32文章
1172瀏覽量
62596 -
自動駕駛
+關注
關注
788文章
14282瀏覽量
170333
原文標題:UWB 技術為 AVP 賦能
文章出處:【微信號:szrfstar,微信公眾號:信馳達科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
電機系統節能關鍵技術及展望
解決錫膏焊接空洞率的關鍵技術
淺談華為通信大模型的關鍵技術

云計算HPC軟件關鍵技術






 工商網監
工商網監
評論