") 什么是技術(shù)安全需求和安全機(jī)制
什么是技術(shù)安全需求和安全機(jī)制

我們在概念開發(fā)階段,通過組件層別的安全分析(FTA, FMEA)對功能安全開發(fā)最初的安全需求,即安全目標(biāo)(SG),進(jìn)行細(xì)化,得到了組件級別的功能安全需求(FSR)和方案(FSC)。
但FSR本質(zhì)上還是屬于功能層面的邏輯安全需求,屬于"需要做什么"的層次,無法具體實(shí)施,所以需要將FSR進(jìn)一步細(xì)化為技術(shù)層面的安全需求(TSR),即"怎么做",為后續(xù)的軟件和硬件的安全開發(fā)奠定技術(shù)需求基礎(chǔ)。
根據(jù)ISO 26262,功能安全系統(tǒng)階段開發(fā)內(nèi)容可以分為兩大部分:
技術(shù)安全需求及方案開發(fā)及驗(yàn)證
系統(tǒng)集成測試及安全確認(rèn)(Validation)
它們在開發(fā)過程中并不連續(xù),分別隸屬于系統(tǒng)開發(fā)V模型的左邊和右邊,中間穿插了硬件和軟件開發(fā)。系統(tǒng)階段技術(shù)安全需求(TSR)和方案(TSC)開發(fā)和概念階段功能安全需求(FSR)和方案(FSC)一脈相承,和概念開發(fā)開發(fā)緊密銜接。只有硬件和軟件開發(fā)完成,才能進(jìn)行系統(tǒng)層面集成測試和需求確認(rèn)。
系統(tǒng)集成這部分我們留在軟件和硬件開發(fā)之后再聊。針對第一個大的部分,即技術(shù)安全需求(TSR)和方案(TSC),我們主要聊以下內(nèi)容:
什么是技術(shù)安全需求TSR
安全機(jī)制的本質(zhì)
怎么從FSR到TSR
什么是技術(shù)安全方案TSC
系統(tǒng)安全架構(gòu)設(shè)計
安全分析
技術(shù)安全需求分配至系統(tǒng)架構(gòu)
鑒于內(nèi)容較多,今天我們先聊前三部分內(nèi)容。
01
什么是TSR
總體而言,技術(shù)安全需求(TSR:Technical Safety Requirement)是為滿足安全目標(biāo)SG或功能安全需求(FSR),由功能安全需求(FSR)在技術(shù)層面派生出的可實(shí)施的安全需求。
那到底什么是由FSR派生出的技術(shù)安全需求呢?
根據(jù)ISO 26262的定義,技術(shù)安全要求(TSR)應(yīng)該明確功能安全需求在各自層級的技術(shù)實(shí)現(xiàn); 考慮相關(guān)項(xiàng)定義和系統(tǒng)架構(gòu)設(shè)計,解決潛在故障的檢測、故障避免、安全完整性(即滿足ASIL等級)以及產(chǎn)品生產(chǎn)和服務(wù)方面的必要安全問題。
什么意思呢?直接上個我自己總結(jié)的公式:
技術(shù)安全需求(TSR) = 由FSR技術(shù)化的安全需求+ 安全機(jī)制 + Stakeholder需求
由FSR技術(shù)化的安全需求
將FSR進(jìn)一步技術(shù)化,得到可以實(shí)施的技術(shù)安全需求,是TSR的重要來源,但它只是TSR其中一個組成部分。
所謂FSR技術(shù)化的安全需求就是,基于系統(tǒng)架構(gòu)中組件分配得到的FSR,根據(jù)該組件內(nèi)部以及對外的依賴關(guān)系和限制條件,將FSR定義的邏輯功能需求進(jìn)行技術(shù)性轉(zhuǎn)化和體現(xiàn)。
這部分技術(shù)需求屬于相對基礎(chǔ)的TSR,不涉及深層次的探測,顯示,控制或減輕系統(tǒng)出現(xiàn)故障的安全措施,所以并不能保證系統(tǒng)功能安全。它的主要的目的是為后續(xù)相關(guān)安全機(jī)制的開發(fā)或者需求的提出奠定技術(shù)基礎(chǔ)。
例如,由FSR技術(shù)化的安全需求包括,定義邏輯功能需求中所涉及的軟件組件,硬件組件(傳感器,控制單元,執(zhí)行單元),組件接口技術(shù)信息(如信號名稱,來源等),傳輸方式(CAN總線等),計算周期,軟件組件不同平臺復(fù)用配置需要的標(biāo)定數(shù)據(jù),硬件組件指標(biāo)要求等。
安全機(jī)制
安全機(jī)制(Safety Mechanism)目的在于探測,顯示和控制故障,屬于功能安全事后補(bǔ)救措施,是TSR非常重要的組成部分,是實(shí)現(xiàn)功能安全,防止安全目標(biāo)SG或者功能安全需求FSR違反的重要技術(shù)實(shí)現(xiàn)手段之一。
安全機(jī)制應(yīng)該包含:
檢測系統(tǒng)性及隨機(jī)硬件故障的措施。例如,針對系統(tǒng)I/O,總線信號范圍檢查,冗余校驗(yàn),有效性檢測,邏輯計算單元數(shù)據(jù)流及程序流監(jiān)控,控制器硬件底層軟件監(jiān)控等。
顯示故障。例如,對駕駛員進(jìn)行聲音,不同類型及顏色的指示燈,提示文字等預(yù)警,增加駕駛員對車輛的可控性。
控制故障的措施。例如,F(xiàn)ail to safe:將系統(tǒng)在指定的故障容錯時間間隔(FTTI)導(dǎo)入安全狀態(tài),包括降級,故障仲裁,故障記錄等。如果不能,還需要定義緊急運(yùn)行時間間隔及運(yùn)行狀態(tài)。或者Fail to operational,通過并行冗余系統(tǒng),當(dāng)一個系統(tǒng)失效后,進(jìn)入另外一個并行系統(tǒng)繼續(xù)提供全部或部分功能。少。
Stakeholder需求
Stakerholder需求主要包括車輛使用,法律法規(guī),生產(chǎn)和服務(wù)方面相關(guān)的安全需求。一般都是以具體技術(shù)細(xì)節(jié)直接進(jìn)行呈現(xiàn),所以會直接并入TSR之中。
例如,車輛發(fā)生碰撞后,相關(guān)項(xiàng)應(yīng)該采取的哪些應(yīng)對措施,可能是轉(zhuǎn)矩輸出非使能,高壓系統(tǒng)斷電等。
此外,針對TSR,還需要注意以下幾點(diǎn):
1
技術(shù)安全要求和非安全要求不能互相矛盾。
2
對于使相關(guān)項(xiàng)達(dá)到或保持安全狀態(tài)的每個安全機(jī)制,應(yīng)指定以下內(nèi)容:切換到安全狀態(tài)的條件,時間間隔(FTTI),必要的話,緊急運(yùn)行狀態(tài)及時間間隔。
3
對于ASIL(A)、(B)、C 和 D 等級的技術(shù)安全需求,應(yīng)該制定防止故障潛伏安全機(jī)制。
4
對于 ASIL(A)、(B)、C和 D 等級的TSR: 用于防止雙點(diǎn)故障變成潛伏故障的安全機(jī)制的開發(fā)應(yīng)符合以下ASIL安全等級要求:
a) ASILB(對于分配為ASILD的技術(shù)安全要求);
b) ASILA(對于分配為ASILB和ASILC的技術(shù)安全要求);
c) QM(對于分配 ASILA的技術(shù)安全要求)。
這個就是安全機(jī)制的安全機(jī)制ASIL等級的約束,該約束的本質(zhì)是對TSR對應(yīng)ASIL等級的分解,主要是為防止由安全機(jī)制失效導(dǎo)致的雙點(diǎn)故障潛伏。(我后面在安全機(jī)制的本質(zhì)會細(xì)聊)
02
安全機(jī)制的本質(zhì)
接下我們聊聊困惑很多朋友的一個問題:安全機(jī)制到底是什么,它和TSR到底有什么區(qū)別?
在ISO 26262-4:2018中,TSR和安全機(jī)制這兩部分內(nèi)容獨(dú)立成章節(jié),并沒有合在一起進(jìn)行闡述,這給很多朋友造成一種誤解,認(rèn)為安全機(jī)制和TSR好像是不一樣的存在,它們之類的區(qū)別也不夠清楚。下面我從三個方面來闡述一下安全機(jī)制的本質(zhì):
1. 安全機(jī)制屬于更深層次的TSR
安全機(jī)制是為防止SG或FSR的違反,基于由FSR技術(shù)化的安全需求,提出的更深層次的事后補(bǔ)救技術(shù)安全措施,它包括:
由FSR技術(shù)化得到的TSR的安全機(jī)制,主要是防止系統(tǒng)性故障,或硬件單點(diǎn)故障潛伏提出的技術(shù)安全需求。
以及安全機(jī)制的安全機(jī)制。例如針某TSR提出了已經(jīng)有了安全機(jī)制A,但由于該TSR的ASIL等級較高(C或D),安全機(jī)制A本身也可能失效,此時如果原有功能正常,系統(tǒng)不會違反安全目標(biāo)SG,但安全機(jī)制A的失效就會潛伏,變成雙點(diǎn)故障,所以需要對安全機(jī)制A的功能安全進(jìn)行監(jiān)控,提出針對安全機(jī)制A的相應(yīng)的技術(shù)安全需求,防止安全機(jī)制A的故障潛伏。
一般來講,考慮到系統(tǒng)實(shí)現(xiàn)的成本和復(fù)雜度,安全機(jī)制不超過兩層。根據(jù)ISO 26262,三點(diǎn)及以上故障就可以認(rèn)為安全故障,否則就會出現(xiàn)無窮的安全機(jī)制嵌套。
2. 安全機(jī)制是實(shí)現(xiàn)相應(yīng)ASIL等級的關(guān)鍵之一
除ISO 26262對不同開發(fā)過程的約束(包括方法,驗(yàn)證等)外,在系統(tǒng),軟件和硬件開發(fā)階段,不同ASIL等級直接決定了應(yīng)該采取哪些安全措施,以及安全措施的類型(或高級層度)。
越高的ASIL等級對應(yīng)的安全措施,在數(shù)量和質(zhì)量的要求越高。例如,對于ASILB的系統(tǒng),可能具有單獨(dú)時間Base的Watchdog可能就夠了,但是對ASILD系統(tǒng)而言,可能需要上程序流邏輯監(jiān)控才能滿足。
當(dāng)然不同的安全機(jī)制在實(shí)施難度和成本上都有所不同,這部分內(nèi)容我會在后續(xù)的專題里一步步講解。
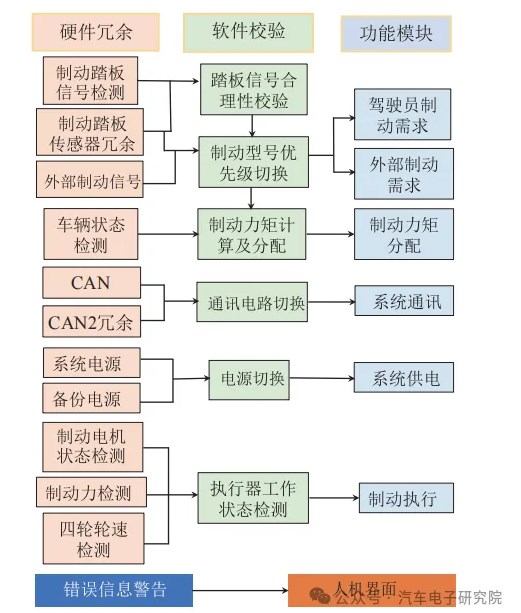
3. 安全機(jī)制多和系統(tǒng)安全架構(gòu)設(shè)計相關(guān),一定程度上決定了系統(tǒng)安全架構(gòu)
安全機(jī)制是保證系統(tǒng)功能安全的非常重要的技術(shù)手段,而這些技術(shù)手段,例如,硬件冗余,輸入輸出有效性檢驗(yàn),安全狀態(tài)導(dǎo)入,或我們常見的控制器3層安全監(jiān)控架構(gòu)等等,這些都直接決定了我們系統(tǒng)的安全架構(gòu),會在架構(gòu)設(shè)計中進(jìn)行考慮,直接融入架構(gòu)設(shè)計之中。這個也是為什么在功能安全在系統(tǒng)階段開發(fā)過程中,花很大的篇幅來講安全機(jī)制和架構(gòu)設(shè)計的重要原因之一。
為了方便理解安全機(jī)制,我們一起來看個關(guān)于加速踏板開度采集的例子:
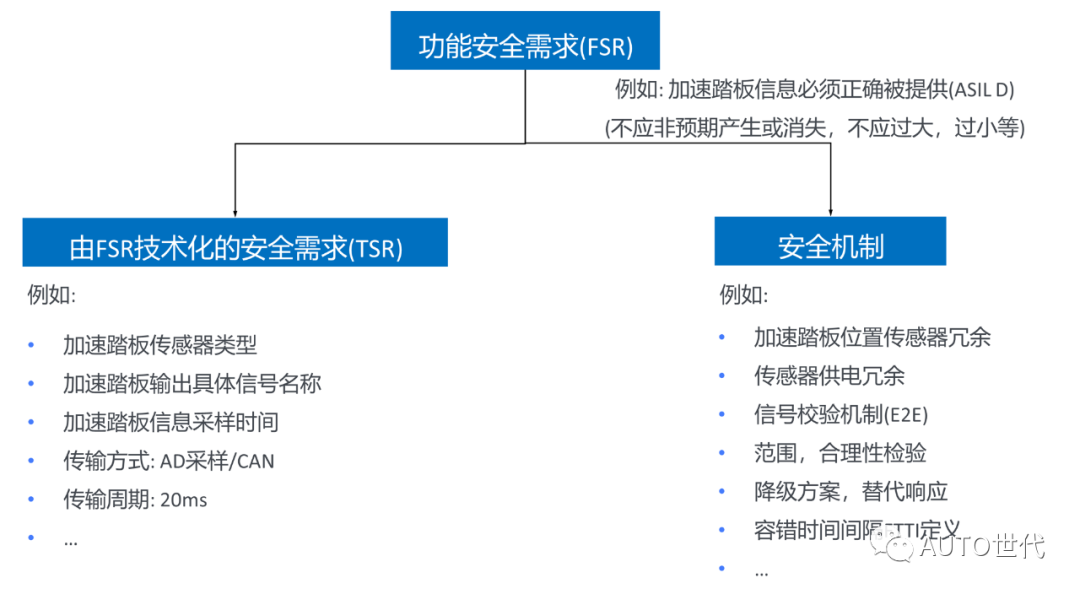
其中,左邊屬于由FSR技術(shù)化的安全需求,主要是明確加速踏板技術(shù)信息,包括采用什么樣傳感器,輸出信號有哪些,類型,采樣周期等。
在實(shí)際系統(tǒng)開發(fā)過程中,為實(shí)現(xiàn)相應(yīng)的ASIL等級,控制系統(tǒng)一般進(jìn)行分層設(shè)計,功能安全擁有獨(dú)立的軟件層和硬件層,開發(fā)過程相對獨(dú)立,甚至獨(dú)立的開發(fā)團(tuán)隊(duì)。
為實(shí)現(xiàn)后續(xù)安全監(jiān)控,需要將安全相關(guān)的應(yīng)用層功能在監(jiān)控層進(jìn)行多樣化設(shè)計復(fù)現(xiàn),所以這部分TSR和我們正常的系統(tǒng)應(yīng)用層功能開發(fā)需求有點(diǎn)類似,但不是完全復(fù)制,而是多樣化,差異化的設(shè)計實(shí)現(xiàn),所以這些信息或者需求會和應(yīng)用層功能實(shí)現(xiàn)存在一定關(guān)聯(lián)。
右邊是安全機(jī)制,是更深層次技術(shù)安全需求,這些都是保證系統(tǒng)功能安全的關(guān)鍵技術(shù)手段。
03
怎么從FSR到TSR
上面我們聊到TSR的具體組成部分,包括由FSR技術(shù)化的TSR,安全機(jī)制和Stakeholder需求。
前兩部分TSR的導(dǎo)出,和概念階段聊到的SG到FSR類似,都是通過安全分析(即FTA,F(xiàn)MEA分析方法)完成。
以FTA分析為例,主要是將違反的FSR作為頂層分析事件,進(jìn)行原因分析,安全分析的具體細(xì)節(jié)我在這里就不重復(fù)了,不熟悉的朋友移步功能安全專題03篇內(nèi)容。
實(shí)際操作過程中,對于比較簡單的FSR,即涉及的組件功能的比較簡單,完全可以依據(jù)經(jīng)驗(yàn)直接導(dǎo)出,對于相對比較復(fù)雜的FSR則需要進(jìn)行完整的安全分析。
對于Stakeholder需求,一般需要根據(jù)Item Definition中定義的法律法規(guī)及之前項(xiàng)目經(jīng)驗(yàn)進(jìn)一步細(xì)化,一般情況下,該部分需求可以在不同項(xiàng)目中可以復(fù)用。
寫在最后: TSR和安全機(jī)制我們就聊完了,網(wǎng)絡(luò)上很多關(guān)于它們的介紹都太表面,照抄標(biāo)準(zhǔn),希望這篇能夠給朋友們理解TSR和安全機(jī)制帶來幫助,下期我們繼續(xù)看功能安全系統(tǒng)階段開發(fā)其他內(nèi)容。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2564文章
52836瀏覽量
765841 -
控制器
+關(guān)注
關(guān)注
114文章
17066瀏覽量
183704 -
CAN總線
+關(guān)注
關(guān)注
145文章
1978瀏覽量
132600 -
FTA
+關(guān)注
關(guān)注
0文章
8瀏覽量
6635
原文標(biāo)題:04 - 汽車功能安全(ISO 26262)系列: 系統(tǒng)階段開發(fā) - 技術(shù)安全需求(TSR)及安全機(jī)制
文章出處:【微信號:阿寶1990,微信公眾號:阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
鋰電池?zé)崾Э卦砑?b class='flag-5'>安全檢測技術(shù)解析
汽車安全技術(shù)全面解析#主動安全、被動安全和ADAS

RS485之空調(diào)如何保證其更安全高效的防護(hù)機(jī)制

電機(jī)繞組滾動烘干爐防爆安全技術(shù)探討
k8s集群安全機(jī)制說明
直流充電安全測試負(fù)載方案解析
深控技術(shù)的工業(yè)網(wǎng)關(guān)通過多重安全機(jī)制與廣泛協(xié)議兼容性,確保工業(yè)數(shù)據(jù)從采集到傳輸?shù)娜溌?b class='flag-5'>安全與高效互
飛騰主板——滿足高能效和安全可信需求
構(gòu)建安全計算生態(tài) | RISC-V 安全機(jī)制的架構(gòu)設(shè)計

汽車上芯片種類及安全需求和性能需求
EMB系統(tǒng)功能安全分析(2)
基于GPU器件行為的創(chuàng)新分布式功能安全機(jī)制為智能駕駛保駕護(hù)航

工業(yè)交換機(jī)的安全機(jī)制

淺談SOC片上系統(tǒng)LoRa-STM32WLE5數(shù)據(jù)安全防御機(jī)制
MSPM0 MCU中的網(wǎng)絡(luò)安全機(jī)制

- 設(shè)計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計資源
- 設(shè)計技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗(yàn)
- 設(shè)計大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論