") 眼動(dòng)追蹤中的坐標(biāo)+追蹤原理
眼動(dòng)追蹤中的坐標(biāo)+追蹤原理

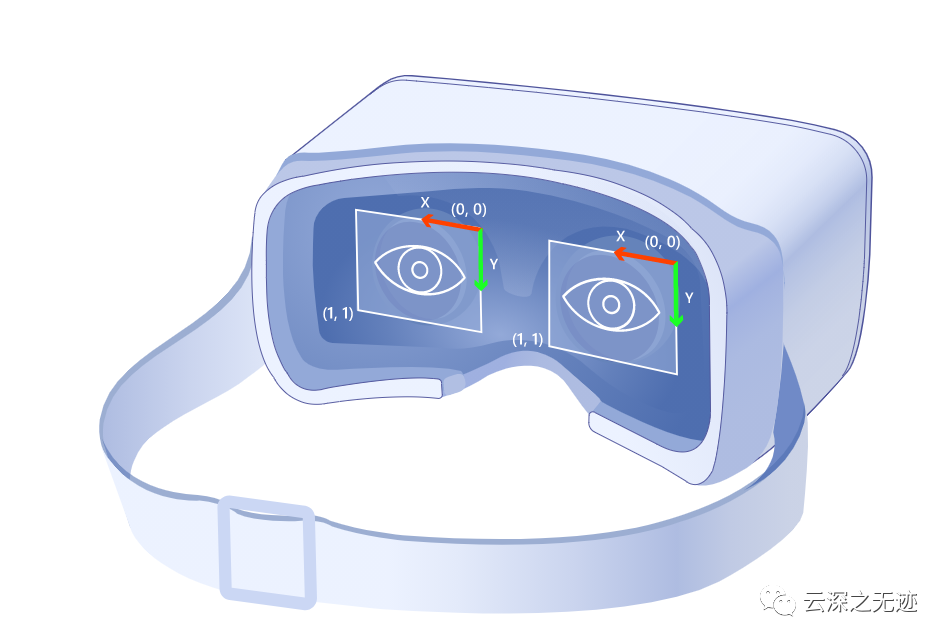
目前的追蹤方案都是基于CV的,使用紅外燈光打亮眼底,使用高幀率的相機(jī)來(lái)捕獲光源在角膜上面的位置。其實(shí)這個(gè)不難,難點(diǎn)在多個(gè)坐標(biāo)之間的轉(zhuǎn)換,因?yàn)橛行┦枪潭ǖ模行┦遣还潭ǖ模@就需要各種轉(zhuǎn)換了,這個(gè)也是我們的眼動(dòng)中最重要也是最需要研究的東西。 所有注視數(shù)據(jù)都映射到與活動(dòng)顯示區(qū)域?qū)R的 2D 坐標(biāo)系中。將眼動(dòng)儀與監(jiān)視器一起使用時(shí),活動(dòng)顯示區(qū)域是不包括監(jiān)視器框架的顯示區(qū)域。對(duì)于在沒(méi)有顯示器的情況下使用的眼動(dòng)儀,活動(dòng)顯示區(qū)域是在對(duì)用戶眼睛進(jìn)行眼動(dòng)儀校準(zhǔn)時(shí)用于顯示校準(zhǔn)點(diǎn)的區(qū)域。 活動(dòng)顯示坐標(biāo)系的原點(diǎn)是活動(dòng)顯示區(qū)域的左上角。點(diǎn) (0, 0) 表示左上角, (1, 1) 表示右下角。
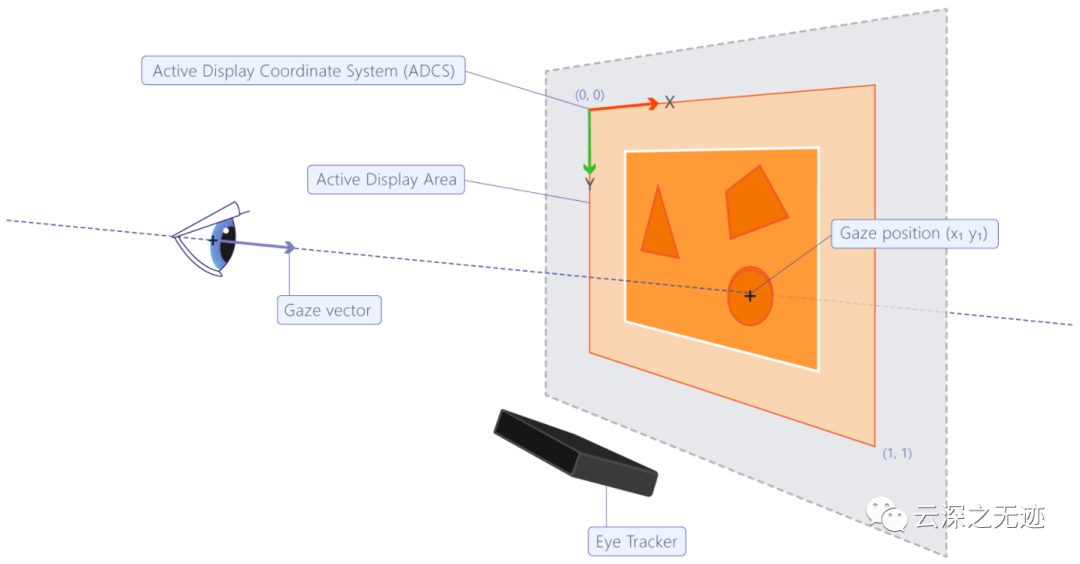
主動(dòng)顯示坐標(biāo)系 (ADCS)
大多數(shù)描述 3D 空間坐標(biāo)的數(shù)據(jù),來(lái)自 Tobii 的基于屏幕的眼動(dòng)儀,都在所謂的用戶坐標(biāo)系或簡(jiǎn)稱 UCS 中給出。UCS 是一個(gè)基于毫米的系統(tǒng),其原點(diǎn)位于眼動(dòng)儀正面的中心。 坐標(biāo)軸的方向如下:x 軸水平指向用戶的右側(cè),y 軸垂直指向用戶的上方,z 軸指向用戶,垂直于眼動(dòng)儀的前表面。
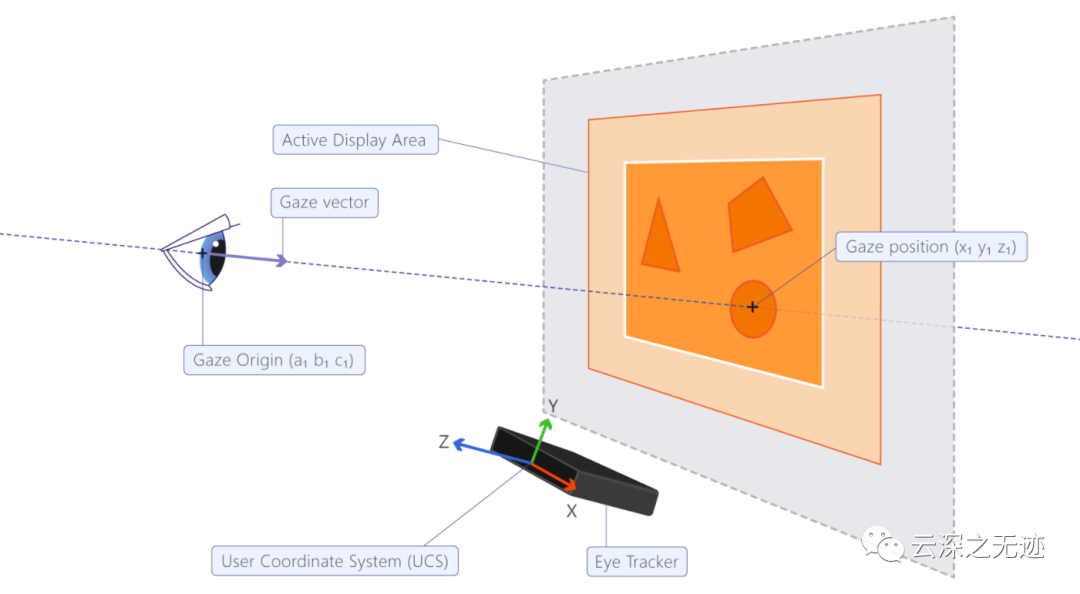
用戶坐標(biāo)系 (UCS)
跟蹤框是眼動(dòng)儀理論上能夠跟蹤眼睛的體積。因此,用戶可以自由移動(dòng)頭部,并且只要眼睛保持在框內(nèi),就仍然可以跟蹤。在 SDK 中,有一些方法可以找出軌道盒體積的大小和位置,以及眼睛在其中的位置。用于描述眼睛在軌跡框內(nèi)的位置的坐標(biāo)系稱為軌跡框坐標(biāo)系(TBCS)。 TBCS 是一個(gè)歸一化坐標(biāo)系,在這種情況下,這意味著 trackbox 的對(duì)角坐標(biāo)為 0,0,0(最靠近眼動(dòng)儀的右上角)和 1,1,1(左下角) ,最遠(yuǎn),角)分別。 坐標(biāo)軸的方向如下:x 軸水平指向用戶左側(cè),y 軸垂直指向用戶下方,z 軸指向用戶。
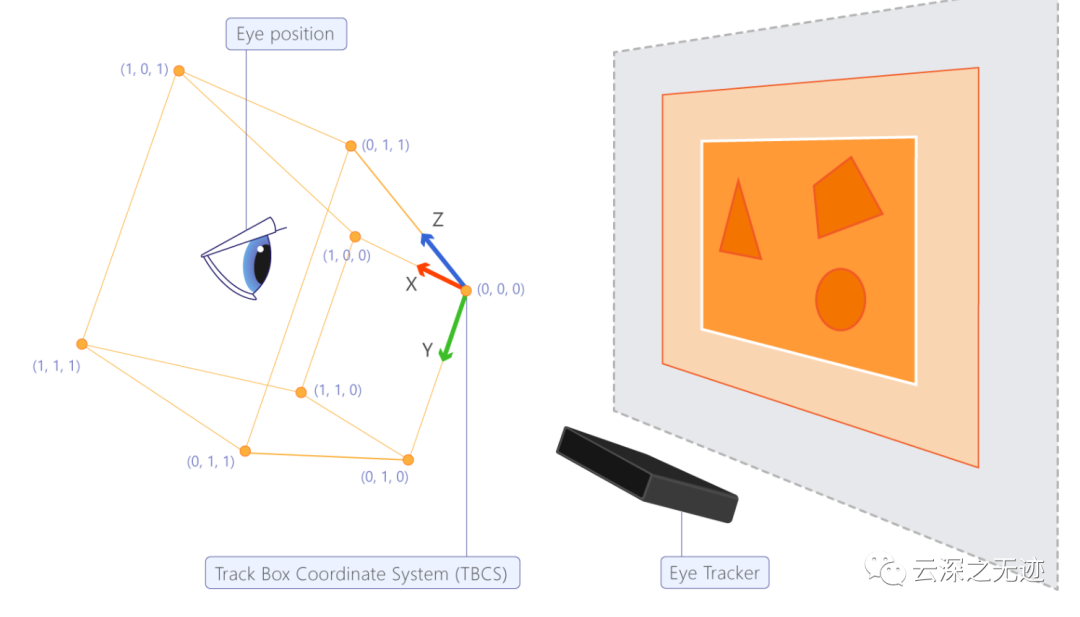
軌道盒坐標(biāo)系 (TBCS)
使用眼動(dòng)儀時(shí),最感興趣的通常是注視,即一個(gè)人在看什么。但是,一個(gè)人不會(huì)將事物視為空間中的一個(gè)點(diǎn),而是將其視為向量方向內(nèi)的所有事物,該向量從被跟蹤的人的眼睛開(kāi)始,并在它碰到不透明的物體時(shí)結(jié)束。我們稱之為凝視向量。(這是一種簡(jiǎn)化,因?yàn)樗僭O(shè)你只能看到中央凹中心記錄的內(nèi)容。) 視線來(lái)源 為左眼和右眼分別提供注視原點(diǎn),并描述注視矢量開(kāi)始的位置。三個(gè)浮點(diǎn)值分別用于描述 x、y 和 z 坐標(biāo)。對(duì)于基于屏幕的眼動(dòng)儀,位置總是在用戶坐標(biāo)系中描述,有時(shí)在跟蹤框坐標(biāo)系中。 凝視點(diǎn) 注視點(diǎn)是為左眼和右眼分別提供的,它描述了活動(dòng)顯示區(qū)域平面與源自與注視矢量方向相同的注視原點(diǎn)的線之間的交點(diǎn)位置。注視點(diǎn)的坐標(biāo)在用戶坐標(biāo)系中作為 3D 點(diǎn)給出,在活動(dòng)顯示坐標(biāo)系中作為歸一化的 2D 點(diǎn)給出。 凝視矢量 對(duì)于基于 HMD 的眼動(dòng)儀,沒(méi)有活動(dòng)顯示區(qū)域,因此無(wú)法計(jì)算注視點(diǎn)(如上所述)。相反,注視由(標(biāo)準(zhǔn)化)注視向量描述。分別為左眼和右眼提供注視矢量。注視向量源自注視原點(diǎn),在HMD 坐標(biāo)系中進(jìn)行了描述。
這里需要寫一下中HMD的眼動(dòng)儀,我去找圖哈~
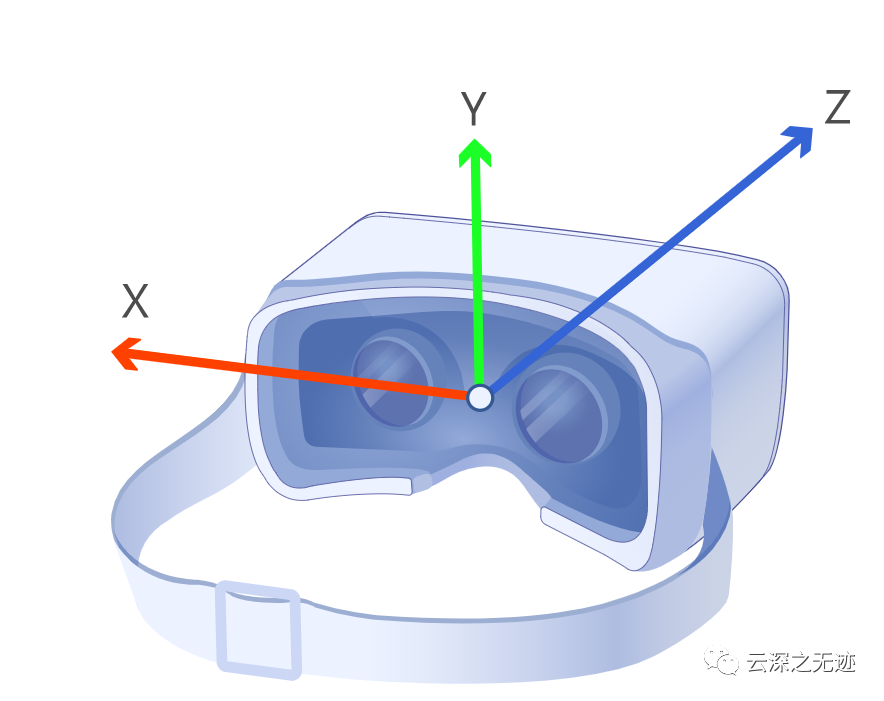
這個(gè)就是所謂的HMD眼動(dòng)儀
HMD 坐標(biāo)系是一個(gè)基于毫米的系統(tǒng),其原點(diǎn)位于 HMD 設(shè)備的鏡頭之間的一點(diǎn),與每個(gè)鏡頭中心的距離相等。 坐標(biāo)軸方向如下:從佩戴者的角度看,x 軸水平指向左側(cè),y 軸垂直向上指向,z 軸指向(向前)遠(yuǎn)離 HMD,垂直到 HMD 跟蹤器的鏡頭。
追蹤區(qū)域和前面的眼動(dòng)有些不一樣
HMD Tracking Area 是一個(gè)標(biāo)準(zhǔn)化的二維坐標(biāo)系,其原點(diǎn) (0, 0) 在右上角(從佩戴者的角度來(lái)看),而 (1, 1) 在左下角。每只眼睛應(yīng)位于跟蹤區(qū)域的中間,坐標(biāo)為 (0.5, 0.5)。 瞳孔大小定義為瞳孔的實(shí)際內(nèi)部物理大小,而不是從外部看眼睛時(shí)看起來(lái)的大小。記住這一點(diǎn)很重要,因?yàn)槿绻銖耐獠靠吹较嗤膬?nèi)部瞳孔大小可能會(huì)有所不同,具體取決于你從哪個(gè)角度看眼睛。這是因?yàn)檠劬Φ那安炕旧鲜且粋€(gè)透鏡,通過(guò)它你可以看到瞳孔。根據(jù)你通過(guò)鏡頭觀察的角度,瞳孔或多或少會(huì)出現(xiàn)扭曲。 然而,在大多數(shù)科學(xué)研究中,瞳孔的實(shí)際大小不如其隨時(shí)間變化的大小重要。在眼動(dòng)追蹤會(huì)話期間記錄瞳孔大小的變化。瞳孔直徑數(shù)據(jù)分別為左眼和右眼提供,是對(duì)瞳孔大小的估計(jì),以毫米為單位。 眼睛張開(kāi)度定義為上下眼瞼之間可以安裝的最大球體的直徑(以毫米為單位)。上下眼瞼由鞏膜和睫毛/眼瞼結(jié)構(gòu)之間的對(duì)比線定義。
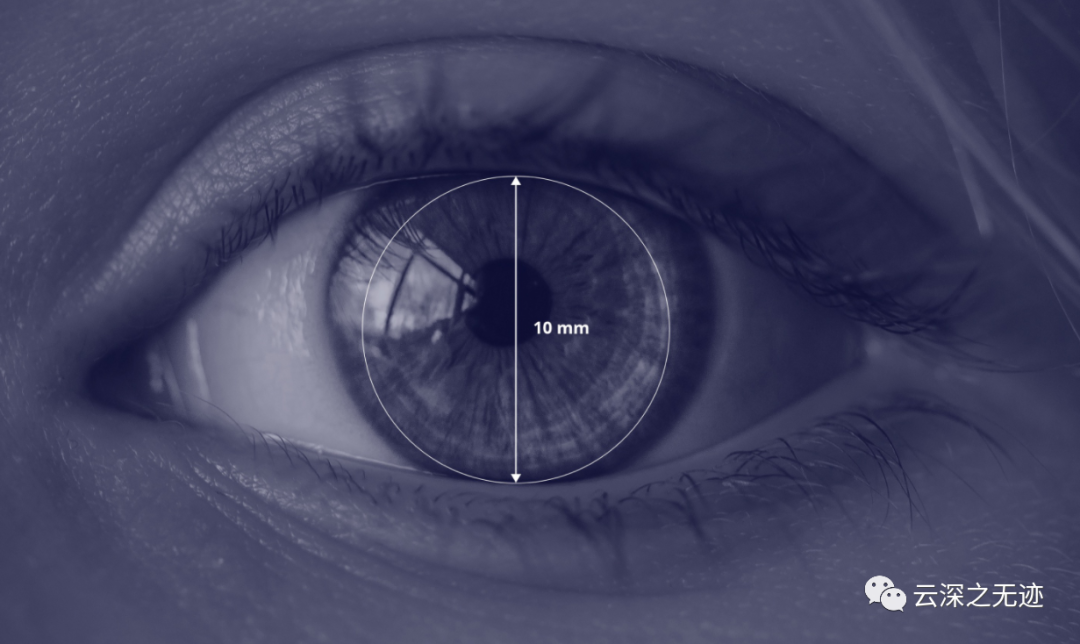
大眼睛
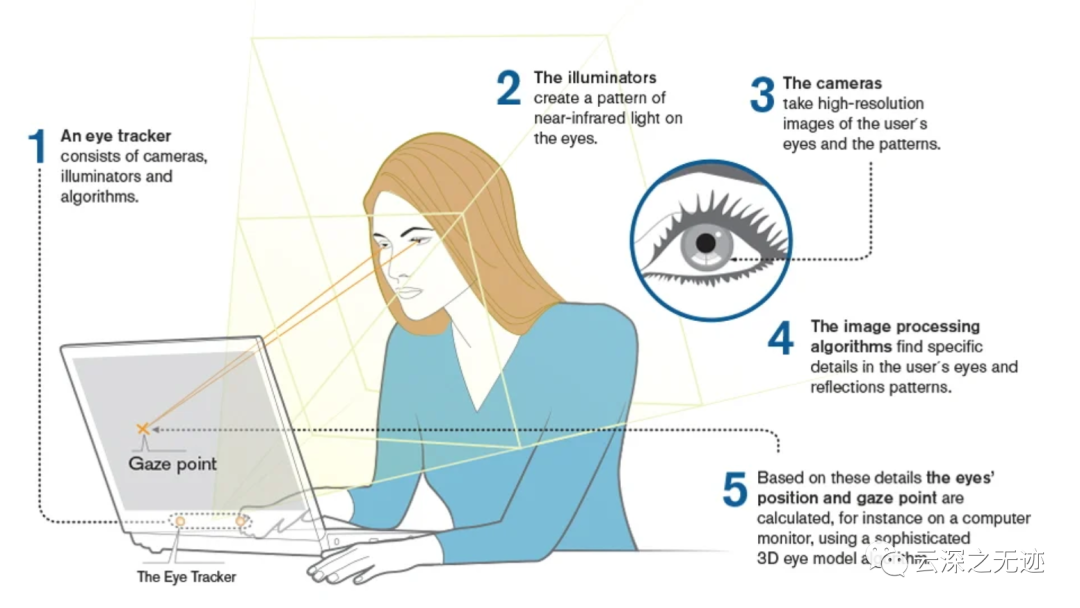
這里再補(bǔ)一個(gè)眼動(dòng)儀器的原理:
瞳孔中心角膜反射 (PCCR)。基本概念是使用光源照亮眼睛,引起高度可見(jiàn)的反射,并使用相機(jī)捕捉顯示這些反射的眼睛圖像。然后使用相機(jī)捕獲的圖像來(lái)識(shí)別光源在角膜(閃光)和瞳孔中的反射。然后可以計(jì)算由角膜和瞳孔反射之間的角度形成的向量——這個(gè)向量的方向,結(jié)合反射的其他幾何特征,然后用于計(jì)算注視方向。 近紅外照明用于在對(duì)象眼睛的角膜和瞳孔上創(chuàng)建反射圖案,并且圖像傳感器用于捕獲眼睛的圖像和反射圖案。然后使用圖像處理算法和眼睛的生理 3D 模型以高精度估計(jì)眼睛在空間中的位置和注視點(diǎn)。
結(jié)合上面的一些坐標(biāo)空間的概念就可以看到這個(gè)東西的意思啦
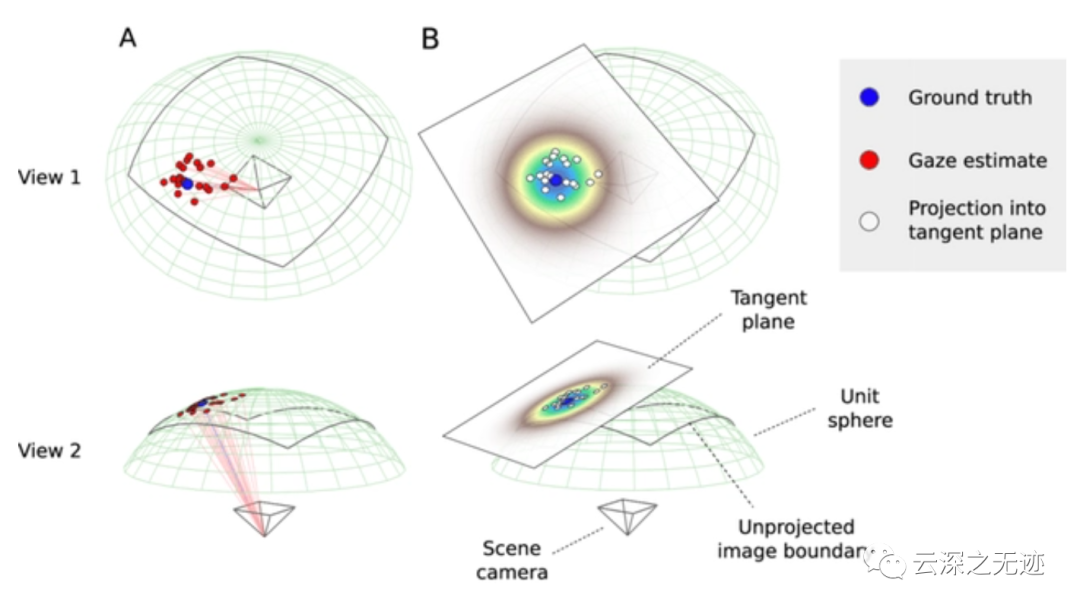
我之前寫過(guò)一個(gè)pupill的眼動(dòng)儀,這個(gè)是單眼追蹤的方案
(A)當(dāng)以球形坐標(biāo)表示地面真實(shí)注視方向dgt時(shí),可以將其可視化為球體上的一個(gè)點(diǎn)(參見(jiàn)上下面板中的藍(lán)色圓盤;兩個(gè)面板都顯示相同的球體部分,盡管從不同的角度)。將瞳孔不可見(jiàn)注視估計(jì)管道應(yīng)用于相應(yīng)的并發(fā)左眼和右眼圖像對(duì),導(dǎo)致注視估計(jì)d dev,它們分布在地面真實(shí)值(上下面板中的紅色圓盤)周圍。
(B) 正交投影到局部切線平面中,有效地展平了球體的曲率。因此,凝視估計(jì)值可以被視為 2D 平面中的點(diǎn)(白色圓盤)。因此,它們會(huì)產(chǎn)生點(diǎn)的2D分布,這可以通過(guò)2D高斯(密度顯示為熱圖)來(lái)解釋。
審核編輯 :李倩
-
監(jiān)視器
+關(guān)注
關(guān)注
1文章
787瀏覽量
33976 -
CV
+關(guān)注
關(guān)注
0文章
53瀏覽量
17102
發(fā)布評(píng)論請(qǐng)先 登錄
RFID在資產(chǎn)追蹤中的應(yīng)用

RFID在物流追蹤中的應(yīng)用

智慧園區(qū)人員定位及軌跡追蹤技術(shù)哪個(gè)好?

人員軌跡如何追蹤管理?人員定位系統(tǒng)一鍵解決難題
本源產(chǎn)品丨指數(shù)追蹤真機(jī)應(yīng)用

《DNK210使用指南 -CanMV版 V1.0》第三十六章 image圖像色塊追蹤實(shí)驗(yàn)
基于光線追蹤的渲染算法實(shí)現(xiàn)

園區(qū)封閉化管理之人員和車輛定位及軌跡追蹤
無(wú)線定位器追蹤器跟手機(jī)怎么連接
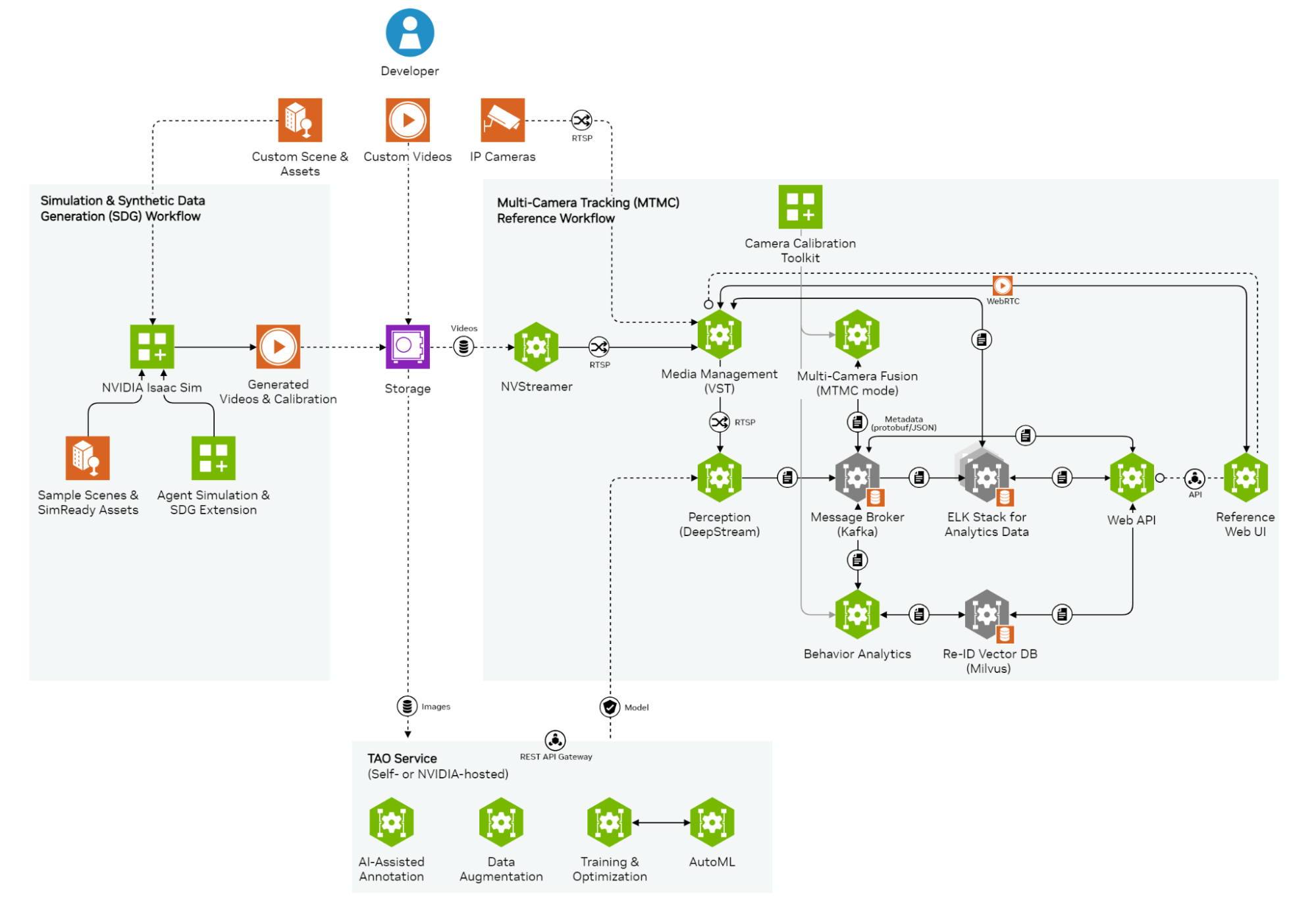
NVIDIA多攝像頭追蹤工作流的應(yīng)用架構(gòu)
如何遠(yuǎn)離網(wǎng)絡(luò)追蹤

IP定位技術(shù)追蹤網(wǎng)絡(luò)攻擊源的方法
智慧園區(qū)人員定位及軌跡追蹤技術(shù)探討
激光測(cè)距傳感器在室內(nèi)無(wú)人機(jī)定位追蹤中的應(yīng)用

SynSense時(shí)識(shí)科技攜手蘇黎世聯(lián)邦理工發(fā)布Speck超低功耗眼動(dòng)追蹤應(yīng)用新突破






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論