") MyCobot六軸機械臂的基本操作(二)
MyCobot六軸機械臂的基本操作(二)

上一講我們做ssh和vnc的設置,有小伙伴問設置些有什么用,那么這里我先來解釋一下這些功能有什么用處,首先我們可以通過ssh在我們的Windows桌面進行程序開發(fā),然后上傳到樹莓派進行驗證,我們也可以在windows平臺通過vnc遠程操作我們的機械臂,這樣你就可以在自己的工作臺上自由編程和上網(wǎng)查資料,然后MyCobot他不會占用你的顯示器。當然了,你也可以直接拿這個樹莓派當做開發(fā)機器使用,也是沒有問題了。
在這里我們使用pycharm的社區(qū)版(Community)就可以了,python的開發(fā)工具很多,也可使用notepad++、jupyter、VSCode等,隨便你方便就行。這里我們主要使用notepad++和pycharm來做為我們本次教學的編程軟件進行講解。
Myblockly
這個軟件是機械臂樹莓派里自帶的一種開發(fā)工具,有興趣的小伙伴可以自己試一下。
好啦我們開始進入到機械臂的基本操作
一:機械臂的校準
MyCobot機械在使用前要進行一次校準,這樣我們做實驗時才能得到正確的結果,那么MyCobot機械臂如何校準呢?
(1)在桌面雙擊rasp_mycobot_test_gui.py,彈出右側界面。
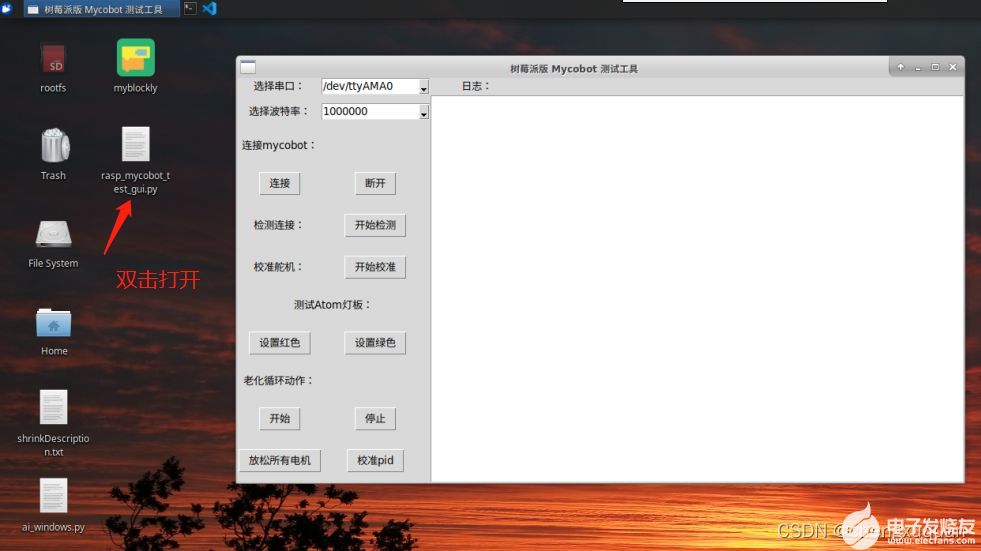
(2)選擇串口:注意樹莓派的串口是ttyAMA0,波特率:1,000,000。這個一定要記住,因為后面我們要經(jīng)常用到這個參數(shù)。然后點擊”連接mycobot“:下面的”連接“。
(3)手動將機械臂的每節(jié)機械臂定位卡位對齊,如圖:


總共六節(jié)機械臂都要對齊。然后我們點擊:”校準舵機:開始校準“,要連點六次。這個時侯機械臂會自動進行舵機的校準工作。
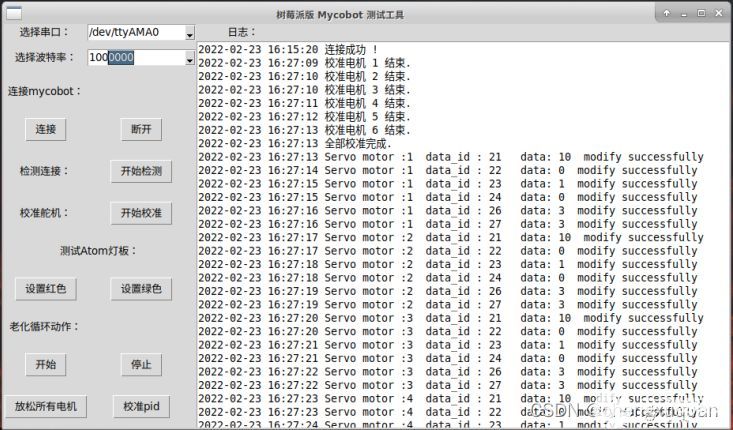
如圖所示,這樣舵機就校準好了。我們關掉這個界面,介紹我們今天最最重要的一個概念,機械臂的坐標系系統(tǒng)。
二:機械臂的坐標系統(tǒng)
在整個機械臂的學過程中,最為重要的一點是你必段了解機械臂的坐標系統(tǒng)系統(tǒng),也就是機械臂在空間中是怎么定位的。在這里我們面要明確的兩個概念一個是坐標系統(tǒng),一個是姿態(tài)。而空間中一點的姿態(tài),可以由多種表示方式,其中最常用的是歐拉坐標。
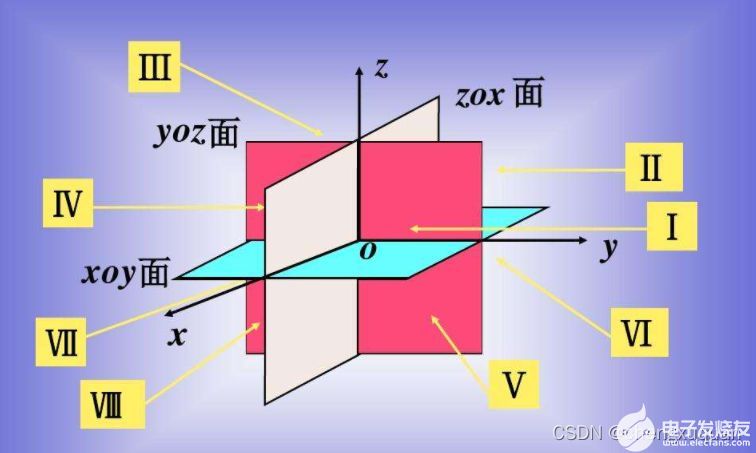
(1)直角坐標系:在本課程中的坐標系統(tǒng)指的就是直角坐標系統(tǒng),也稱為迪卡爾坐標系統(tǒng),也就是空間中的一點垂直于X、Y、Z軸的距離,通常記為(x,y,z)。
(2)歐拉坐標:用于表示空間中某個點的姿態(tài),是在直角坐系中的某個點,沿x,y,z軸任意軸旋轉一定角度后的一個計算值,該值稱為該點在此位置的一個姿態(tài)。
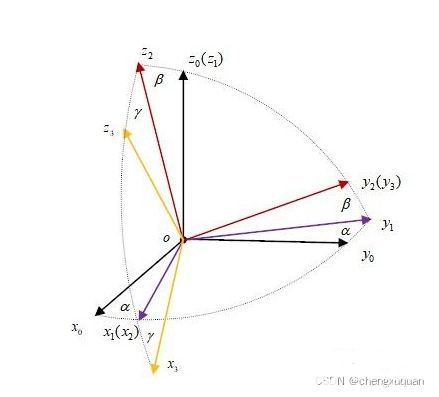
機械臂在空間的位置即包括直角坐標和歐拉坐標,一般記為:[X,Y,Z,rx,ry,rz],前面XYZ為直角坐標,后面的rx,ry,rz為歐拉坐標。
有關機械臂的坐標系統(tǒng),有興趣的小伙伴可以深入的學習,這里僅僅簡單介紹一下,如果你想深入的學習,那么需要下功夫把數(shù)學,代數(shù),幾何要重新學習一下。這里不多陳述了。
(3)機械臂的關節(jié)角度
這里所說的是機械臂和關節(jié)間的角度與1、2、所描述的空間坐標要區(qū)分開。還記得前面我們校準機械臂時的零位嗎?

機械臂的角度,就是每一軸,相對于這個定位標志的角度。因為我們講的是六軸機械臂,所以各關節(jié)的角度表示為:([J1,J2,J3,J4,J5,J6],50),注意方括號里面是機械臂各關節(jié)的角度,圓括號里面的50,指的是機械臂到達指定角度的速度。
這一章我們就介紹到這里,下一章我們將以六個小程序,為大家展示機械臂的運行。
本文為博主「BBM的開源HUB」的原創(chuàng)文章,使用產(chǎn)品為大象機器人mycobot,侵刪。
審核編輯 黃昊宇
-
機器人
+關注
關注
213文章
29663瀏覽量
212393 -
機械臂
+關注
關注
13文章
553瀏覽量
25327
發(fā)布評論請先 登錄
極海G32R501工業(yè)六軸機械臂參考方案釋放工業(yè)4.0產(chǎn)業(yè)價值

大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產(chǎn)品

大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產(chǎn)品
大象機器人×進迭時空聯(lián)合發(fā)布全球首款RISC-V全棧開源小六軸機械臂

家里亂成“垃圾場”,樹莓派也能一鍵搞定家務了?

專為機器人教育而設計的創(chuàng)客友好型機械臂

如何使用PLC控制myCobot 320機械臂

使用myCobot 280機械臂結合ROS2系統(tǒng)搭建機械分揀站

深度解析!RK3568 加持機械臂是如何實現(xiàn)顏色識別與抓取的?

RK3568國產(chǎn)實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!
焊接機器人六個軸分別是什么作用

如何正確操作六軸焊接機器人
OrangePi AIpro應用:機械臂應用開發(fā)指南

工業(yè)機器人和機械臂的設計、功能和應用有哪些區(qū)別?
開源六軸協(xié)作機器人myCobot 320結合人臉表情識別情緒!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論