") 提高工業(yè)機器人軌跡精度的原因和方法
提高工業(yè)機器人軌跡精度的原因和方法

01
提高工業(yè)機器人軌跡精度的緣由
提高工業(yè)機器人軌跡精度很大的一部分原因就是為了滿足現(xiàn)階段國產(chǎn)機器人的發(fā)展需求。 在2018年之前,國產(chǎn)工業(yè)機器人主要的集中于搬運、上下料、分揀、焊接等應用領域,國產(chǎn)機器人主要是點到點的運動方式,對工業(yè)機器人軌跡運動要求不高,能夠滿足當時的客戶需求。
但是到了2018年,根據(jù)中國機器人產(chǎn)業(yè)聯(lián)盟發(fā)布的數(shù)據(jù),由于國產(chǎn)機器人在搬運、上下料等應用領域的準確切入,使得2013-2017年都保持著較快的增長,直到2018年,國產(chǎn)機器人銷量增率出現(xiàn)首次下滑。
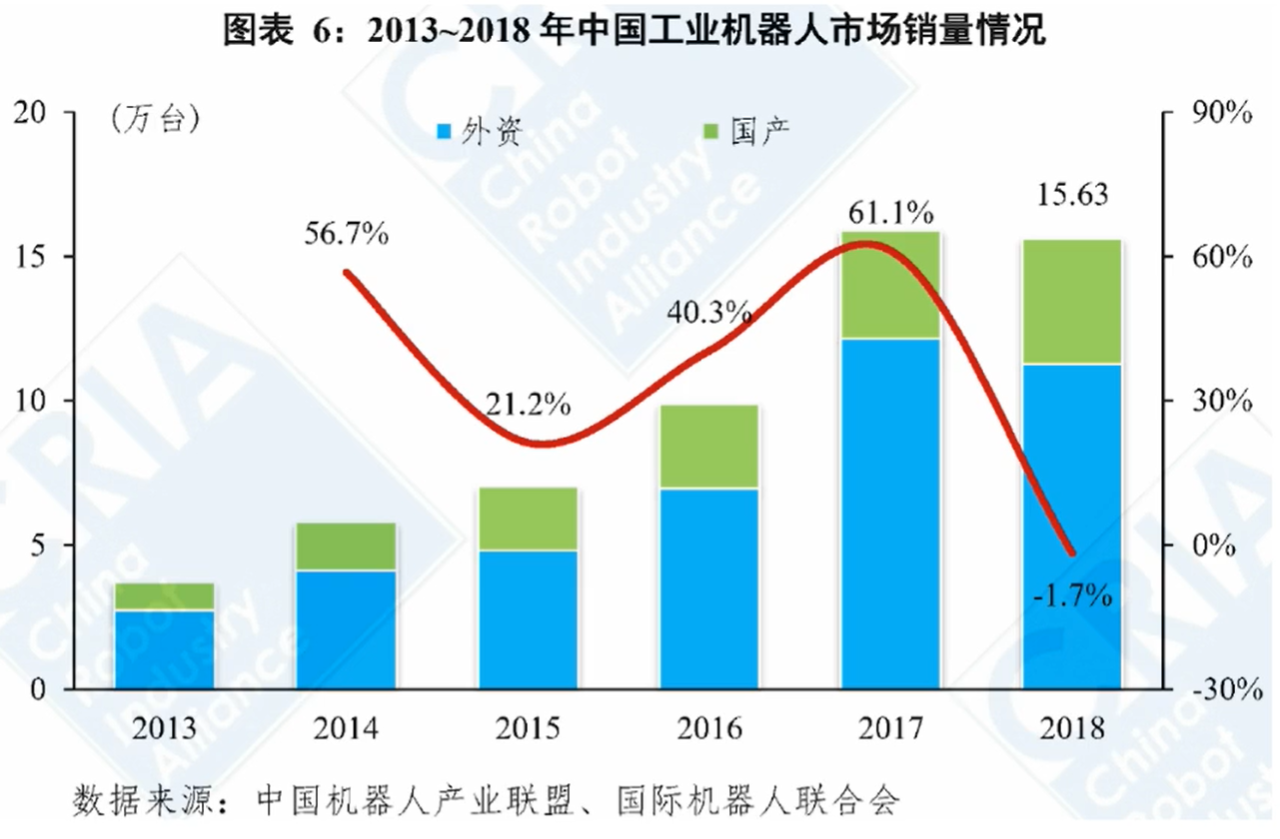
2013—2018年中國工業(yè)機器人市場銷量情況
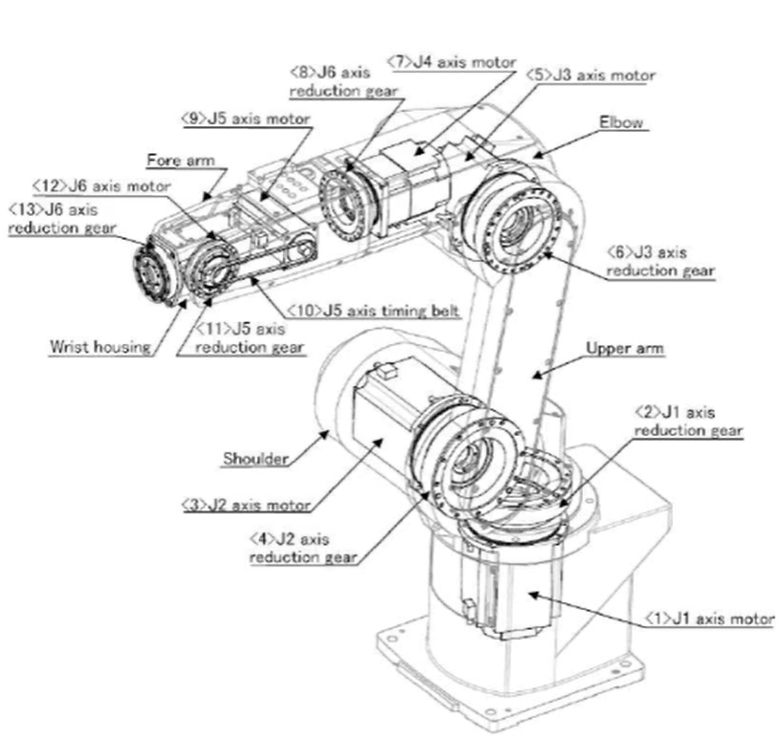
雖然國產(chǎn)廠家也可以生產(chǎn)多關節(jié)工業(yè)機器人,特別是六軸工業(yè)機器人,但由于缺乏核心技術以及核心零部件,在穩(wěn)定性、精度、使用壽命和故障率等方面與以“四大家族”為代表的國外品牌相比還有較大差距,技術實力的不足制約了國產(chǎn)機器人在高端領域的應用。 為了進一步搶占市場,提升企業(yè)的競爭力,國產(chǎn)工業(yè)機器人諸多廠家意識到,除了要擴大國產(chǎn)機器人產(chǎn)量,提高企業(yè)產(chǎn)能,還要提升國產(chǎn)機器人的性能,如穩(wěn)定性、精度、可靠性等。于是,部分企業(yè)加大研發(fā)投入,探索關鍵技術研發(fā)模式,通過與高校、科研院所等多種方式的合作,使產(chǎn)品逐漸向中高端應用領域邁進,如:激光切割、精密點膠、液晶搬運等。
工業(yè)機器人在中高端應用領域主要有以下要求:1)能夠按照復雜軌跡運行并要求軌跡精度;2)本體剛性要強,運行過程中無抖動;3)運行節(jié)拍要快,同時加減速平穩(wěn);4)有些場合還要考慮負載變化對運行過程的影響。所以隨著社會的發(fā)展和需求的提高,提高工業(yè)機器人的軌跡精度刻不容緩!
02
影響工業(yè)機器人軌跡精度的因素
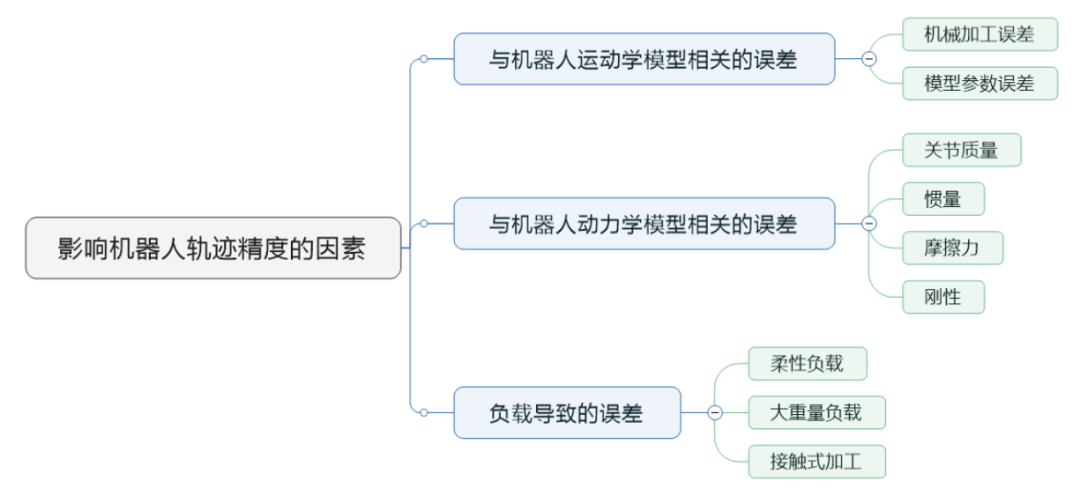
影響機器人軌跡精度的因素包括與機器人運動學模型相關的誤差、與機器人動力學模型相關的誤差和負載導致的誤差三個方面。其中負載導致的誤差也可歸于運動學或者動力學中,下面我們從運動學和動力學模型兩個方面進行介紹。
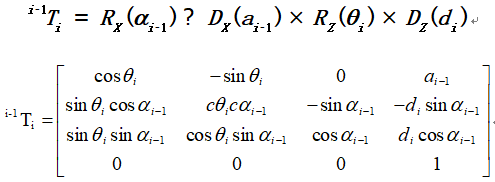
1、常用的機器人運動學模型——D-H模型
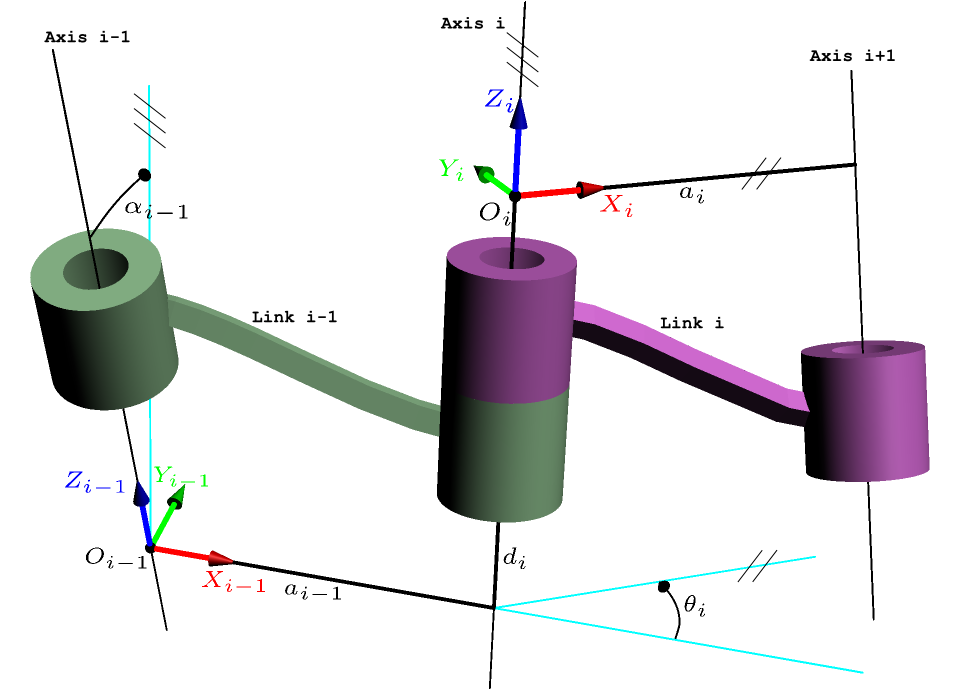
Denavit-Hartenberg(D-H)模型表示了對機器人連桿和關節(jié)進行建模的一種非常簡單的方法,可用于任何機器人構型,也可以用于表示在任何坐標中的變換。機器人的每個連桿可以用四個運動學參數(shù)來描述,其中兩個參數(shù)用于描述連桿本身,另外兩個參數(shù)用于描述連桿之間的連接關系。其四個參數(shù)是:
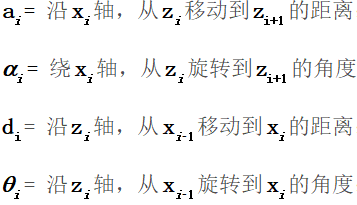
連桿長度![]() :兩個關節(jié)的軸(旋轉關節(jié)的旋轉軸, 平移關節(jié)的平移軸) 之間的公共法線長度;
:兩個關節(jié)的軸(旋轉關節(jié)的旋轉軸, 平移關節(jié)的平移軸) 之間的公共法線長度;
連桿扭轉![]() :一個關節(jié)的軸相對于另一個關節(jié)的軸繞它們的公共法線旋轉的角度;
:一個關節(jié)的軸相對于另一個關節(jié)的軸繞它們的公共法線旋轉的角度;
連桿偏移![]() :一個關節(jié)與下一個關節(jié)的公共法線和它與上一個關節(jié)的公共法線沿這個關節(jié)軸的距離;
:一個關節(jié)與下一個關節(jié)的公共法線和它與上一個關節(jié)的公共法線沿這個關節(jié)軸的距離;
關節(jié)轉角![]() :一個關節(jié)與下一個關節(jié)的公共法線和它與上一個關節(jié)的公共法線繞這個關節(jié)軸的轉角。
:一個關節(jié)與下一個關節(jié)的公共法線和它與上一個關節(jié)的公共法線繞這個關節(jié)軸的轉角。
建模步驟是:
變換矩陣為:
按照D-H法進行建模,影響誤差的因素有:機器人基座點位置、機器人Home點、關節(jié)轉角偏移、關節(jié)齒輪間隙、關節(jié)減速比和耦合比、關節(jié)軸平行度、連桿長度、機器人TCP中心點精度、機器人各軸自重。
2、機器人動力學模型
機器人動力學問題分為正向和逆向動力學問題。
正向動力學問題是已知機器人各關節(jié)的驅動力或力矩,求解機器人各關節(jié)的位移、速度、加速度。
逆向動力學問題是已知各關節(jié)的位移、速度和加速度(即已知關節(jié)空間的軌跡或末端執(zhí)行器在笛卡爾空間的軌跡),通過慣性力、離心力、科氏力、粘摩擦力、靜摩擦力、重力或者外力,求解關節(jié)驅動力或力矩。
動力學方程一般是兩種形式: 歐拉-拉格朗日運動方程:對于任何機械系統(tǒng),拉格朗日函數(shù)L定義為系統(tǒng)總的動能K與總的勢能P之差,即L=K-P。這里,L是拉格朗日算子,K是動能,P是勢能。下式中Ek表示動能,Ep表示勢能。

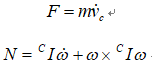
牛頓-歐拉方程:剛體的運動是質心的平動和繞質心的轉動的合成,其中,質心的平動用牛頓方程表示,繞質心的轉動用歐拉方程描述。下式中:![]() 表示加速度,
表示加速度,![]() 表示角加速度,N是力矩,
表示角加速度,N是力矩,![]() 是質心參考系,
是質心參考系,![]() 為參照的剛體慣性張量。
為參照的剛體慣性張量。
03
伺服系統(tǒng)產(chǎn)品如何提升軌跡精度
從伺服系統(tǒng)提升軌跡精度主要是體現(xiàn)在協(xié)助控制器提升動力學性能。針對伺服自身的能力來說,可以從參數(shù)辨識、參數(shù)自整定和振動抑制三方面,進行改善從而提升軌跡精度。還可以在與控制器配合時,從各種前饋以及力位混合控制方面進行提升。
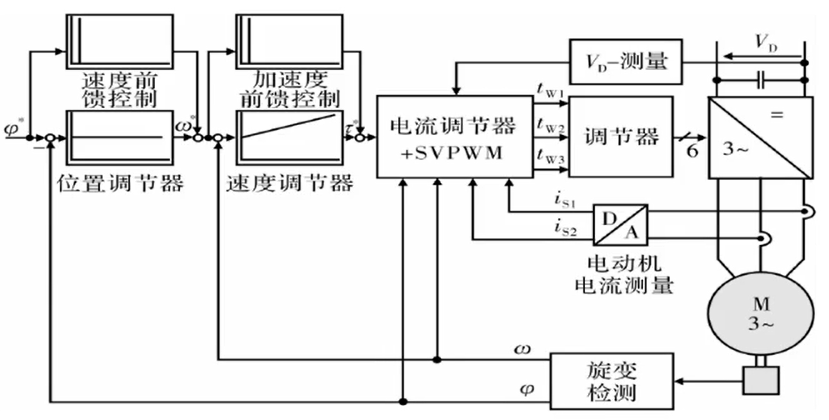
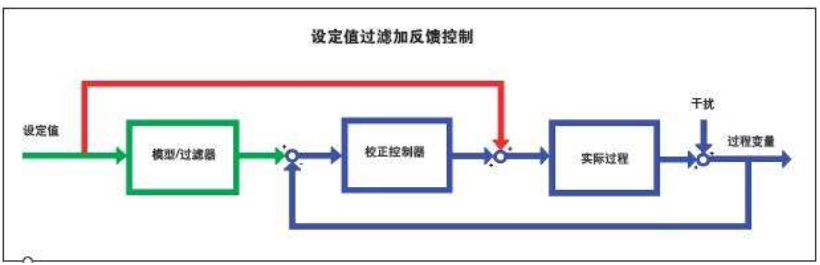
伺服基本的控制原理圖 1、慣量辨識及參數(shù)自整定技術 多關節(jié)機器人在不同運動姿態(tài)和帶載情況下,由于臂展及負載的變化導致各關節(jié)臂慣量有較大變化,要保持高性能控制特性,就需要伺服系統(tǒng)對慣量進行準確辨識和參數(shù)自整定。可以有效提升工業(yè)機器人運行控制性能,減少調試時間,提升技術支持效率。
機器人各關節(jié)慣量辨識技術
離線慣量辨識技術 誤差《3%; 簡化RLS在線慣量辨識技術 誤差《5%; 機器人控制器配合實現(xiàn)系統(tǒng)慣量的精確辨識技術
參數(shù)免調試自整定技術
同時在線慣量辨識和參數(shù)自整定,三環(huán)響應最優(yōu)化,無需繁瑣調試過 程; 自動諧振抑制,負載擾動抑制和跟蹤誤差消除 2、機器人機械振動抑制技術 工業(yè)機器人多關節(jié)串聯(lián)型機械結構特點,決定其剛性低,易產(chǎn)生機械諧振和末端定位抖動,嚴重制約運行及加工效率,所以需要對振動進行抑制。使用機械振動抑制技術,支持多種振動抑制功能,根據(jù)機器人振動類型和產(chǎn)生原因選擇功能應用,有效抑制振動,提高效率和安全性。
機械諧振抑制技術
陷波器: 5個,50-4000Hz
電機齒槽力矩波動抑制功能
減速機脈動抑制功能
末端定位抖動抑制技術
振動抑制濾波器:4個,1-300Hz
模型制振技術:1-300Hz

3、負載擾動抑制技術 工業(yè)機器人在帶重力負載使能時,制動器松開轉矩負載突變,導致點頭現(xiàn)象。摩擦阻力突變,減速機間隙導致機器人運動方向改變時,出現(xiàn)軌跡跟蹤誤差大,軌跡突變等問題。 使用負載擾動技術能夠有效消除機器人帶重力負載啟動時點頭現(xiàn)象和減小由摩擦和間隙導致的軌跡跟蹤誤差。
機器人使能時重力負載擾動抑制控制技術
使能時重力負載擾動補償控制
重力負載扭矩停機記憶及啟動預設功能
靜摩擦,動摩擦,間隙補償控制技術
根據(jù)摩擦模型及位置速度,進行摩擦前饋補償
速度方向改變時的減速機間隙力矩補償技術
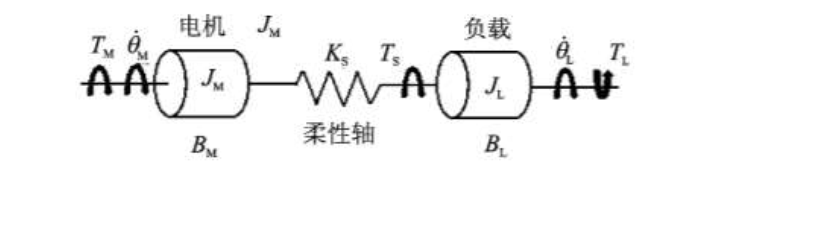
4、模型跟蹤振動抑制 將電機與負載作為整體進行分析,建立模型抑振濾波器,分析模型中引起振動的相關參數(shù),并進行調整,可設置組合參數(shù),以應對不同運行速度、不同負載的振動情況。
04
伺服系統(tǒng)產(chǎn)品介紹
在國內(nèi)繁多的伺服驅動產(chǎn)品中,清能德創(chuàng)率先推出機器人專用多軸一體EtherCAT網(wǎng)絡伺服驅動產(chǎn)品,有適合3kg-20kg機器人系統(tǒng)使用的CoolDrive R系列和CoolDrive RC系列。 多軸一體EtherCAT網(wǎng)絡伺服驅動產(chǎn)品內(nèi)置了多種機器人專用控制算法,采用EtherCAT工業(yè)以太網(wǎng),保證多軸同步運行更高速、精準,內(nèi)含最高分辨率達24bit的高精度絕對值編碼器,采用分布式時鐘,另外控制模式實時切換,滿足機器人的控制精度。

作為2020年新品,清能德創(chuàng)推出了高性能大功率多軸一體化伺服驅動器CoolDrive RA,此系列實現(xiàn)了小型化與大功率的兼顧,支持共直流母線輔助軸擴展,大幅提升設備性能,降低工時成本,還具有深度定制的特點,滿足不同需求。
審核編輯:郭婷
-
機器人
+關注
關注
213文章
29667瀏覽量
212523
原文標題:從伺服系統(tǒng)來看如何提升機器人的軌跡精度
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
工業(yè)機器人與協(xié)作機器人概念不同

工業(yè)機器人高精度控制方法:富唯智能開啟工業(yè)制造的“毫米級革命”
工業(yè)機器人工作站的建設意義
工業(yè)機器人4大控制方式,你知道幾種?

工業(yè)機器人市場釋放回暖信號
攝影機器人市場發(fā)展趨勢分析
10余家企業(yè)亮相2024高工機器人年會
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎模塊
焊接機器人拖拽軌跡怎么設置






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論