 基于視覺傳感器的ORB-SLAM系統的學習
基于視覺傳感器的ORB-SLAM系統的學習

01、背景介紹
自主導航是機器人基礎性和關鍵性技術,是機器人實現其他更高級任務的前提。視覺 SLAM (Simultaneous Localization And Mapping) 利用視覺傳感器獲取環境圖像信息,基于多視圖幾何算法構建環境地圖。視覺SLAM技術廣泛應用于無人駕駛、元宇宙、游戲、智能機器人等領域。在無人駕駛方面,一些大廠如騰訊、阿里、百度、華為、小米、商湯等企業投入重金研發,開放大量關于視覺SLAM職位。同時,國內許多獨角獸無人駕駛公司如Momenta、AutoX、小馬智能和圖森未來等舉重金招募視覺SLAM人才。隨著元宇宙的火爆,國內互聯網巨頭尤其字節跳動,紛紛將大量資金投入元宇宙,致使視覺SLAM人才進一步稀缺,引發視覺SLAM更高的薪酬與福利。
02、ORB-SLAM3介紹
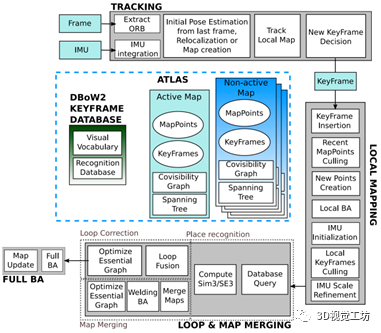
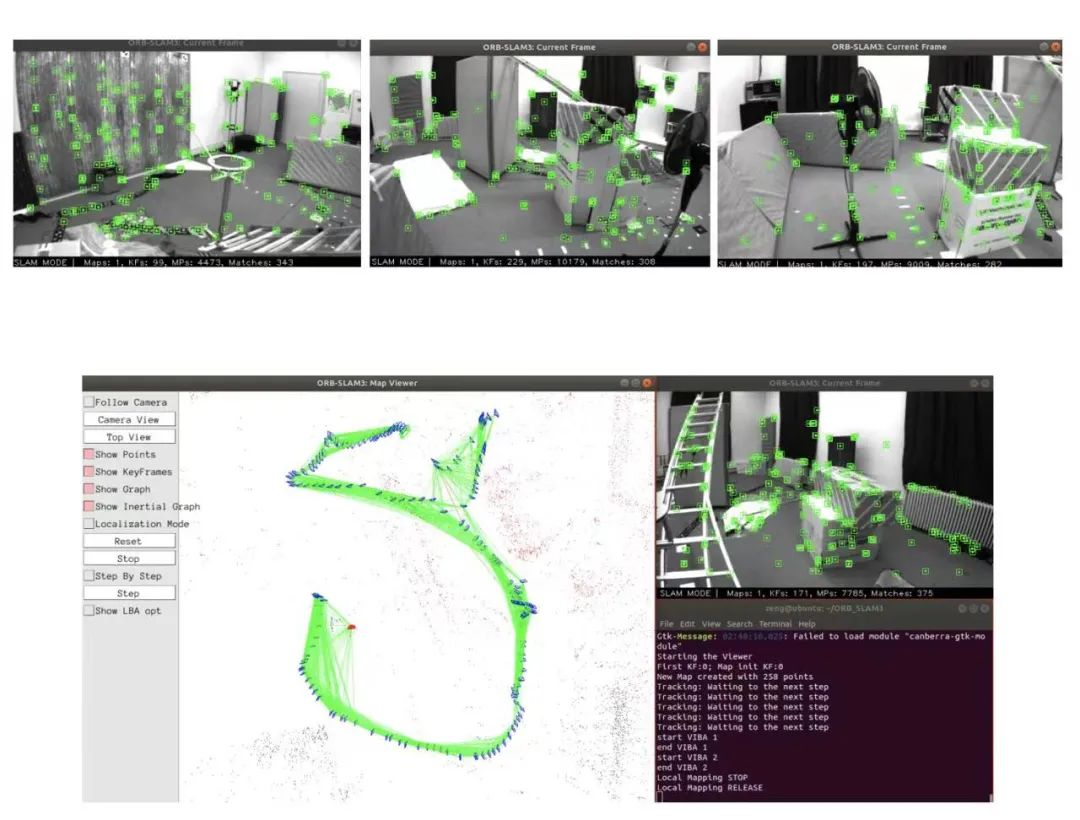
視覺SLAM是一種基于視覺傳感器的 SLAM 系統,與激光傳感器相比,視覺傳感器具有成本低、保留環境語義信息的優點,能夠與深度學習進行大量結合。ORB-SLAM系列算法是視覺SLAM中具有最廣泛關注與應用的算法。ORB-SLAM3是一個支持視覺、視覺+慣導、混合地圖的SLAM系統,可以在單目、雙目和RGB-D相機上利用針孔或者魚眼模型運行。在大場景/小場景、室內/室外,ORB-SLAM3都能魯棒地實時運行,被廣泛應用于商業化產品中。
03、學習難點
在學習ORB-SLAM3過程中,需要掌握算法部署、主要線程之間的邏輯關系,吃透ORB-SLAM3算法原理和底層代碼。主要難點包括:深入理解關鍵幀、共視圖、因子圖等重要概念;掌握IMU預積分的推導過程,以及局部建圖線程、閉環與地圖合并線程之間的算法邏輯等!
審核編輯:郭婷
-
傳感器
+關注
關注
2565文章
52916瀏覽量
766608 -
機器人
+關注
關注
213文章
29697
原文標題:重磅!透徹理解視覺ORB-SLAM3:理論基礎+代碼解析+算法改進
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
三維高斯潑濺大規模視覺SLAM系統解析

【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
一種基于點、線和消失點特征的單目SLAM系統設計

使用安森美圖像傳感器優化視覺系統設計

Sony偏振傳感器加持 Blackfly S工業相機突破視覺成像反光難題

一種基于MASt3R的實時稠密SLAM系統
利用VLM和MLLMs實現SLAM語義增強

最新圖優化框架,全面提升SLAM定位精度

激光雷達在SLAM算法中的應用綜述








 工商網監
工商網監
評論