") 一種融合基于相機的姿態(tài)估計和IMU傳感器的步態(tài)分析方法
一種融合基于相機的姿態(tài)估計和IMU傳感器的步態(tài)分析方法

無標(biāo)記步態(tài)分析系統(tǒng)可以測量有用的步態(tài)指標(biāo),以確定有效的臨床治療方案。盡管這種步態(tài)分析系統(tǒng)不需要很大的空間、多個標(biāo)記,也不受時間限制,但它在步態(tài)過程中無法精確測量下肢關(guān)節(jié)運動學(xué)參數(shù)。特別是,它具有較大的踝關(guān)節(jié)角度誤差。
據(jù)麥姆斯咨詢報道,近日,由日本東京理工大學(xué)(Tokyo University of Science)、廣島大學(xué)(Hiroshima University)、縣立廣島大學(xué)(Prefectural University of Hiroshima)的研究人員組成的團隊在Scientific Reports期刊上發(fā)表了題為“Verification of gait analysis method fusing camera-based pose estimation and an IMU sensor in various gait conditions”的最新論文,團隊提出了一種融合基于相機的姿態(tài)估計和IMU傳感器的步態(tài)分析方法,提出的方法顯著降低了踝關(guān)節(jié)峰值角度的平均絕對誤差(MAE),有望作為臨床步態(tài)評估工具。
步速、步長和關(guān)節(jié)運動學(xué)等步態(tài)指標(biāo)是臨床環(huán)境中步態(tài)障礙患者的關(guān)鍵評估參數(shù)。步態(tài)的時空和運動學(xué)參數(shù)已被用于評估神經(jīng)系統(tǒng)疾病的治療效果,并預(yù)測老年人摔倒的風(fēng)險。這些指標(biāo)為規(guī)劃物理治療和確定治療效果提供了有價值的信息。目前,基于光電標(biāo)記的三維運動捕捉(3DMC)系統(tǒng)已被用作臨床步態(tài)分析的典型測量工具,它能夠精確測量步態(tài)指標(biāo)。
光電3DMC系統(tǒng)具有步態(tài)指標(biāo)測量的可靠性和可重復(fù)性。盡管3DMC系統(tǒng)能夠精確測量步態(tài)指標(biāo),但由于經(jīng)濟和時間的限制,人們很難在臨床環(huán)境中使用它。此外,它在測量時需要較大的空間和專業(yè)的技術(shù)。
基于慣性測量單元(IMU)的運動捕捉系統(tǒng)可被用作3DMC的替代方法。然而,該系統(tǒng)需要將多個IMU傳感器連接到多個人體關(guān)鍵部位。基于相機的無標(biāo)記運動捕捉系統(tǒng)使用人體姿態(tài)估計算法來測量人體步態(tài),也可作為3DMC的替代方法。微軟Kinect由配有深度傳感器的RGB相機組成,可以在沒有反射標(biāo)記的情況下測量步態(tài)。
Kinect可以高可靠性地測量步速、步時和步長等時空參數(shù)。此外,它還被用作體弱者的運動輔助工具,以及測量雙任務(wù)步態(tài)的認(rèn)知功能評估工具。然而,先前的研究表明,與光電3DMC系統(tǒng)相比,深度相機無法精確測量下肢關(guān)節(jié)角度等運動學(xué)參數(shù)。
此外,由于采樣率的原因,使用深度傳感器的無標(biāo)記運動捕捉系統(tǒng)無法輕松測量快速的關(guān)節(jié)運動。大多數(shù)深度傳感器的采樣率為30Hz,而用于步態(tài)分析的3DMC采樣率大于60Hz或100Hz。較低的采樣率可能導(dǎo)致重要的下肢關(guān)節(jié)角度數(shù)據(jù)丟失。
最近,基于RGB相機的二維(2D)無標(biāo)記人體運動跟蹤系統(tǒng),如PoseNet和OpenPose(OP),已被開發(fā)用于估計人體姿態(tài)和人體關(guān)鍵部位。OP是一款開源的人體姿態(tài)估計軟件,它使用來自每個RGB圖像的兩分支多級卷積神經(jīng)網(wǎng)絡(luò)(CNN)作為輸入來估計人體關(guān)鍵點。
盡管這些系統(tǒng)沒有深度傳感器,但它們可以使用CNN的二維圖像或視頻來估計人體關(guān)節(jié)點。這些系統(tǒng)在臨床環(huán)境中具有作為步態(tài)分析工具的巨大潛力,因為它們不需要附加標(biāo)記、專業(yè)的技術(shù)或巨大的成本。
OP可作為帕金森病和自閉癥譜系障礙的篩查工具,但使用二維姿態(tài)估計系統(tǒng)進行步態(tài)分析時仍存在一些問題。由于姿態(tài)估計僅估計人體關(guān)鍵點,因此用戶需要根據(jù)人體環(huán)節(jié)和匹配計算關(guān)節(jié)運動學(xué)。此外,當(dāng)OP被用于步態(tài)分析時,對于其精度有較高的要求。之前的一些研究報告指出,OP可以在步態(tài)過程中測量矢狀面上的時空和運動學(xué)參數(shù),且誤差較小。
研究團隊之前的研究表明,與光電3DMC系統(tǒng)相比,通過OP進行的單RGB相機步態(tài)分析可以測量多個時空參數(shù)和矢狀面關(guān)節(jié)角度,具有良好到優(yōu)秀的一致性;然而,在某些步態(tài)條件下,下肢關(guān)節(jié)角度的測量誤差會增加,包括過量的二維圖像平面外運動,例如增加的足行進角度(FPA)。
尤其是,踝關(guān)節(jié)峰值角度會有很大誤差。當(dāng)使用單個RGB相機從側(cè)面測量行走對象時,相機的二維圖像平面可以輕松捕捉屈伸運動。相比之下,二維圖像平面外的運動(如過量的FPA)會影響關(guān)節(jié)角度的精度。姿態(tài)估計算法也影響了其精度,因為該算法沒有設(shè)計用于在這種情況下的步態(tài)運動學(xué)分析。
盡管研究人員試圖在單個RGB相機分析中減少由二維圖像平面外運動引起的關(guān)節(jié)角度誤差,但針對二維平面外過量運動和踝關(guān)節(jié)角度誤差的有效校正方法尚未得到充分解決。準(zhǔn)備多臺RGB相機可能會減少角度誤差;然而,由于空間和成本較大,在臨床環(huán)境中難以采用這種方法。
使用單臺相機的三維姿態(tài)估計器可能有用,但是,考慮到其在臨床環(huán)境中的使用,這種方法存在處理速度和應(yīng)用方便性等問題。為了克服這些限制,使用IMU傳感器數(shù)據(jù)(如人體關(guān)鍵部位加速度和角速度)補充OP運動學(xué)參數(shù)可能有助于提高精度。
在本論文中,科研團隊研究了無標(biāo)記步態(tài)分析方法的性能,該方法使用OP和足部的IMU傳感器進行基于單個RGB相機的姿態(tài)估計,以測量不同步態(tài)條件下的踝關(guān)節(jié)運動學(xué)參數(shù)。16名健康的年輕成年男性參與了這項研究。他們比較了四種不同步態(tài)條件下的時空參數(shù)和下肢關(guān)節(jié)角度。
這些參數(shù)是利用光電運動捕捉、使用OP的無標(biāo)記步態(tài)分析方法以及提出的融合OP和IMU方法進行測量的。他們發(fā)現(xiàn),在四種步態(tài)條件下,與OP相比,提出的融合OP和IMU方法顯著降低了踝關(guān)節(jié)峰值角度的平均絕對誤差。所提出的方法具有在各種步態(tài)條件下測量時空步態(tài)參數(shù)和下肢關(guān)節(jié)角度(包括踝關(guān)節(jié)角度)的潛力,有望作為臨床步態(tài)評估工具。
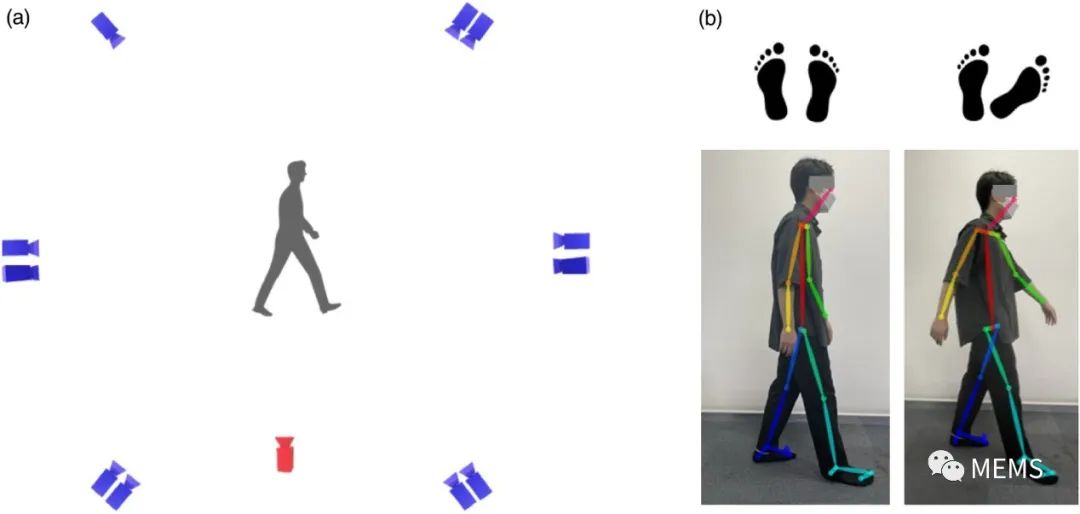
圖1 步態(tài)測量實驗設(shè)置和OP的人體模型
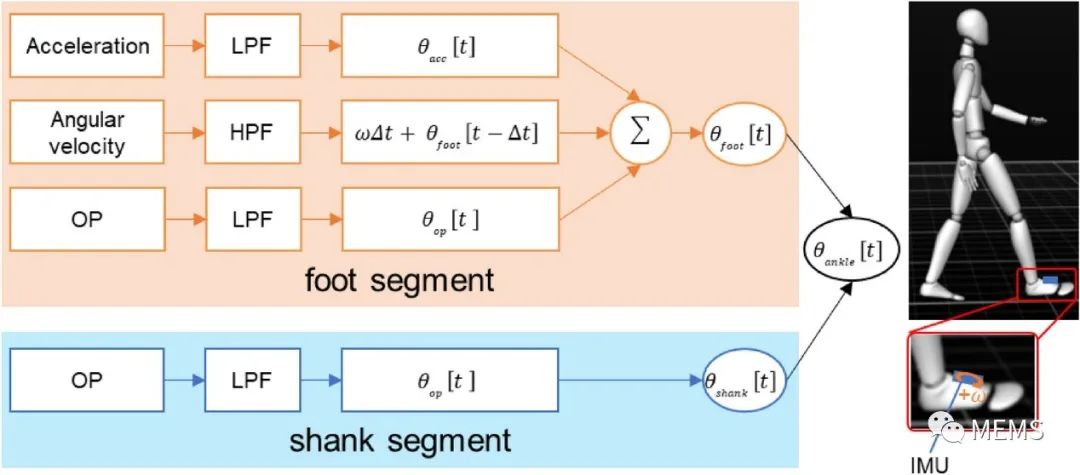
圖2 本論文提出的融合OP和IMU的踝關(guān)節(jié)角度測量方法
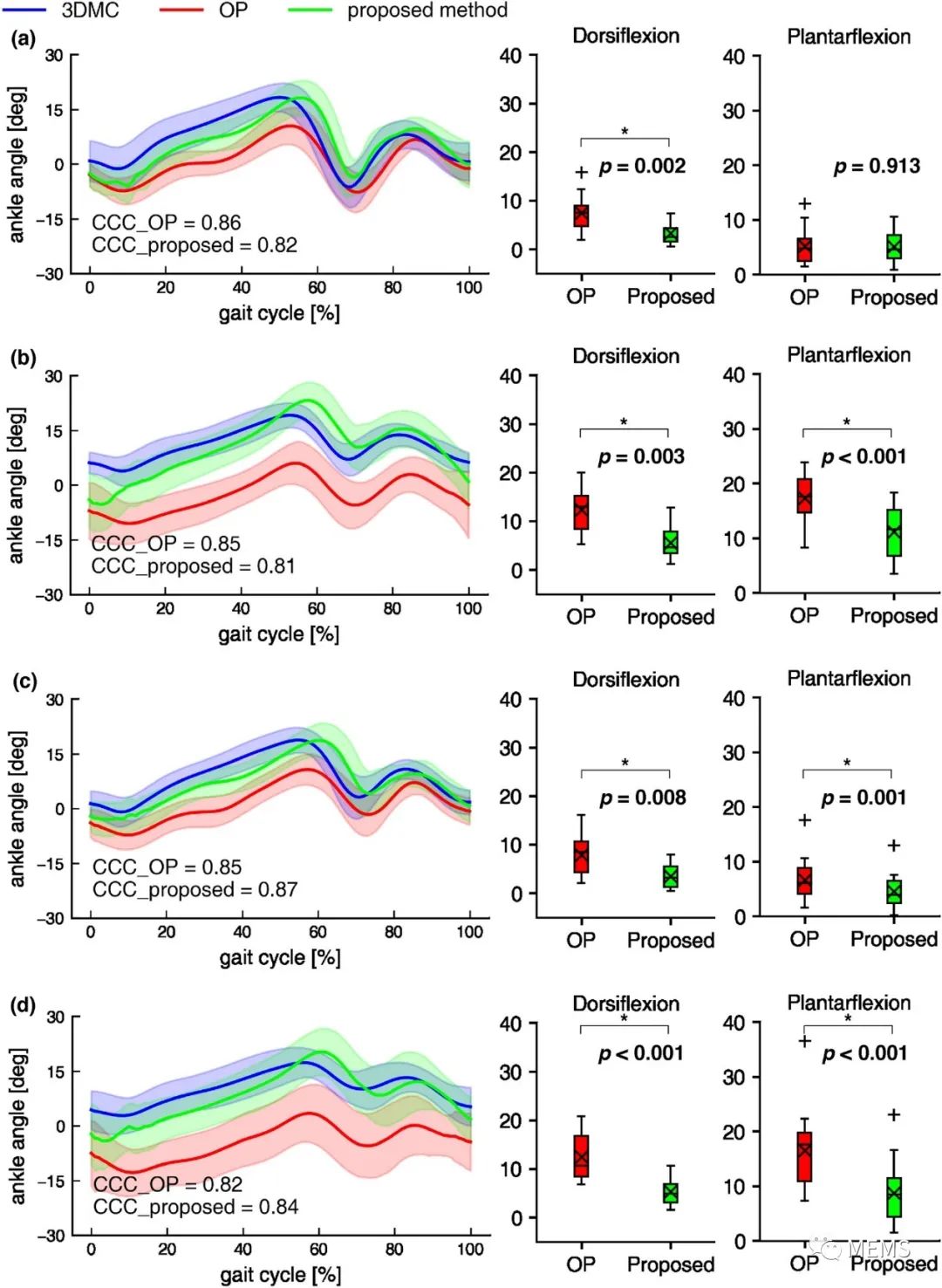
圖3 三種方法(3DMC、OP、融合OP和IMU的方法)的踝關(guān)節(jié)角度測量結(jié)果對比
論文信息:
https://doi.org/10.1038/s41598-022-22246-5
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2565文章
52880瀏覽量
766496 -
RGB
+關(guān)注
關(guān)注
4文章
807瀏覽量
59849 -
FPA
+關(guān)注
關(guān)注
0文章
10瀏覽量
1717 -
卷積神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
4文章
369瀏覽量
12281
原文標(biāo)題:融合基于相機的姿態(tài)估計和IMU傳感器的步態(tài)分析方法
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
RGB+EVS視覺融合相機:事件相機的革命性突破?
求助,關(guān)于ST的IMU和地磁計用motionfx庫融合后航向角異常的問題求解
求助,關(guān)于傳感器融合庫的使用問題求解
ST的IMU和地磁計用motionfx庫融合后航向角異常的原因?
研究用于人體足底壓力和步態(tài)分析的高靈敏度壓力傳感器
基于RV1126開發(fā)板的人臉姿態(tài)估計算法開發(fā)
零知開源——ESP8266結(jié)合ICM20948實現(xiàn)高精度姿態(tài)解算

視美泰EVS事件融合相機新品“靈光一號”正式發(fā)布,開啟視覺新紀(jì)元

如何利用傳感器融合改進工業(yè) 4.0 生產(chǎn)的流程和物流
《DNK210使用指南 -CanMV版 V1.0》第二十三章 六軸傳感器——姿態(tài)解算實驗
CGQ-24霍爾傳感器是一種什么類型的傳感器
精密制造的革新:光譜共焦傳感器與工業(yè)視覺相機的融合
使用一種高度集成的ToF位置傳感器進行精確的距離測量

愛普生開發(fā)用于姿態(tài)和振動控制的理想IMU
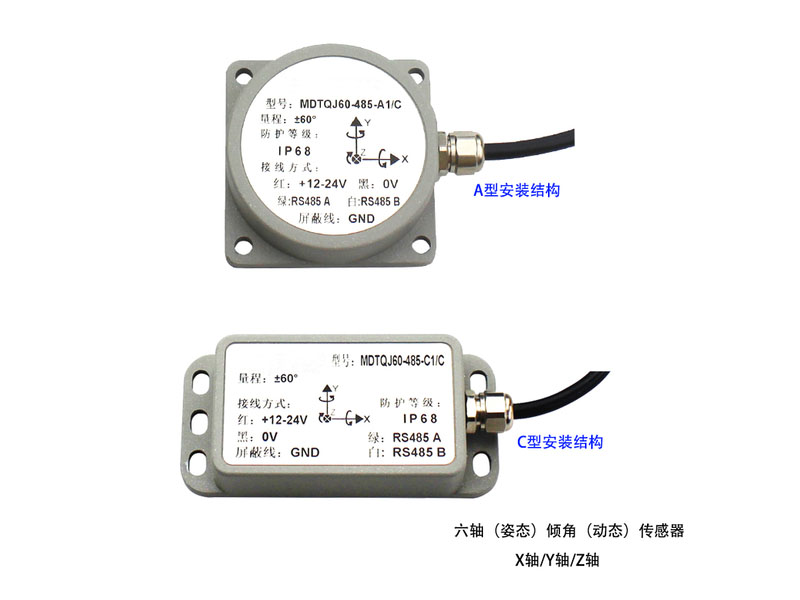
六軸姿態(tài)傾角動態(tài)傳感器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論