 基于結構光的高精度開源三維重建系統
基于結構光的高精度開源三維重建系統

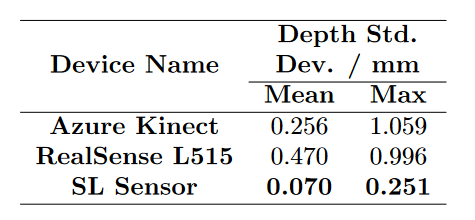
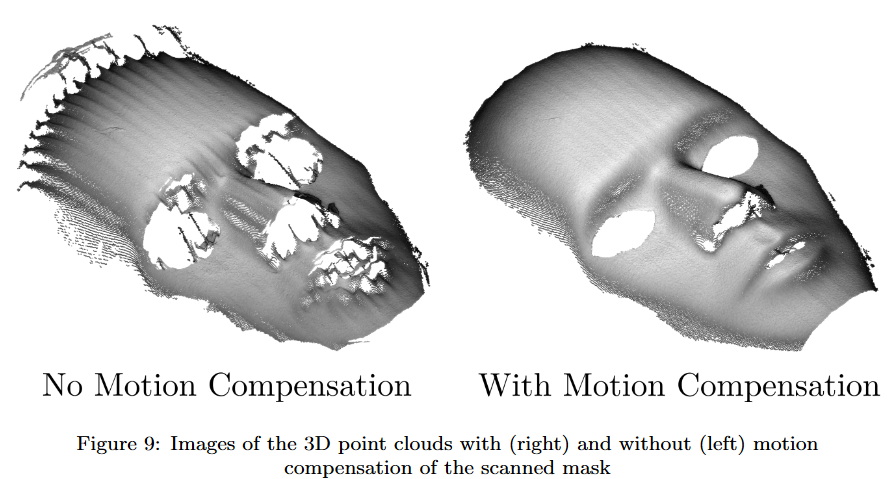
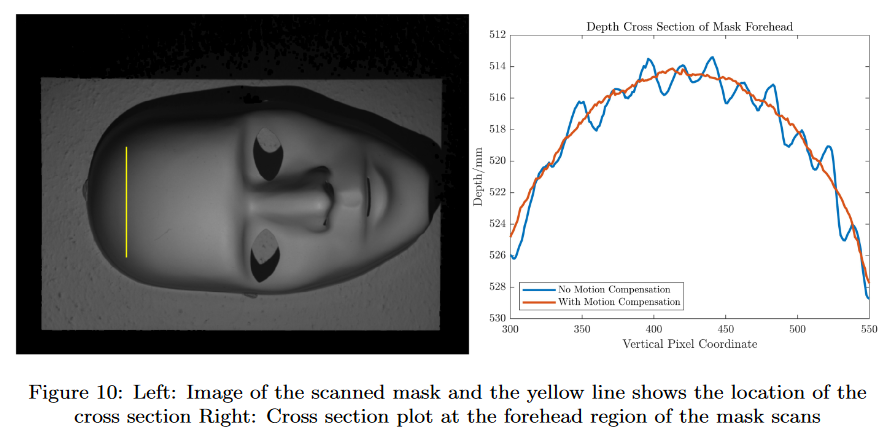
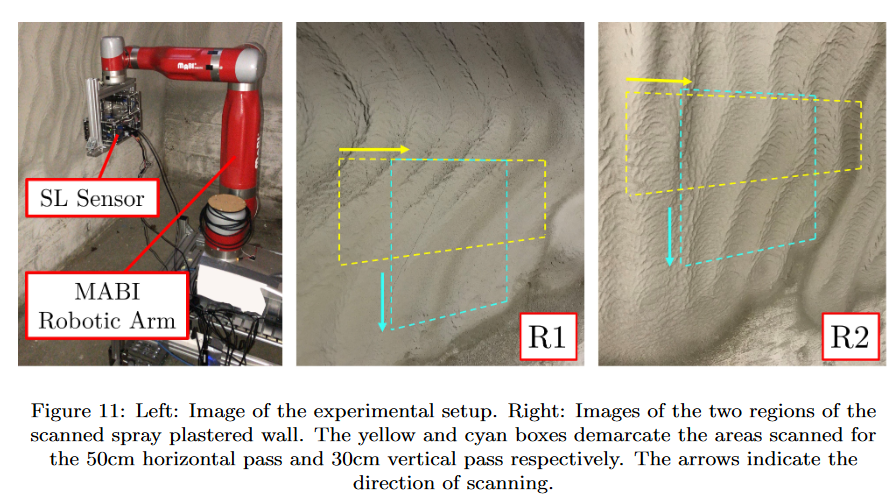
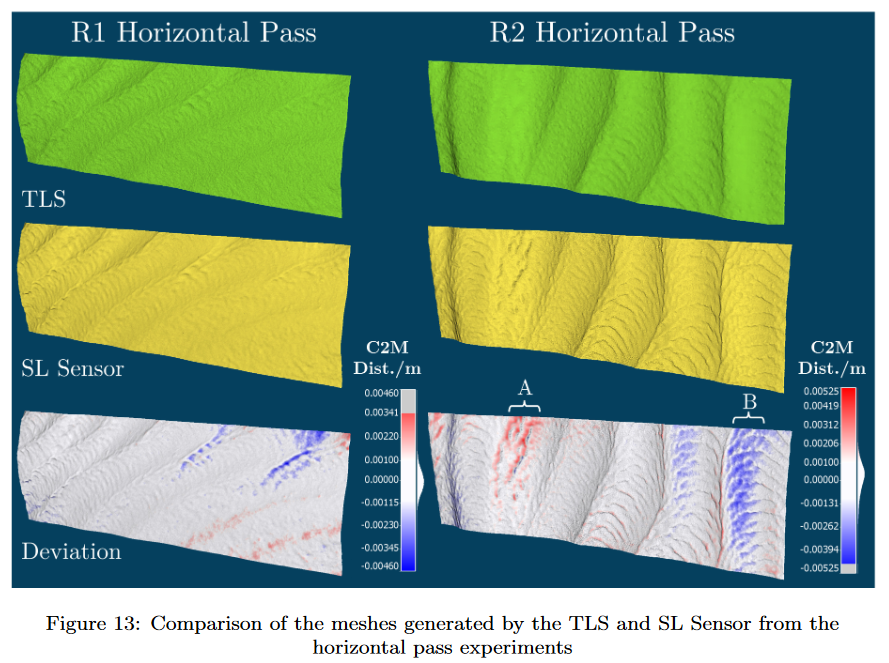
許多面向建筑領域的機器人作業都需要獲得高精度的三維表面信息以完成類似于自動水泥拋光匯總石膏噴涂等作業。然而,目前在市場上消費級深度相機并不能滿足其毫米級的精度要求。本文中提出了一個基于結構光的解決方案SL sensor,能夠達到5hz的發布頻率的同時生成高保真的點云(基于PSP方法)。通過與其他深度相機的實驗-Azure Kinetic和RealSencse L515,驗證了其在精度和準確度方面均有較好的優勢。為了使SL Sensor成為機器人應用實驗平臺,我們為其添加了一個運動補償機制使得其能夠在線性運動期間也能夠正常工作(傳統PSP方法僅在靜態環境下能夠使用)。通過場景實驗表明SL Sensor 能夠重建出高精度的石灰噴涂表面。
系統介紹
(一)硬件系統
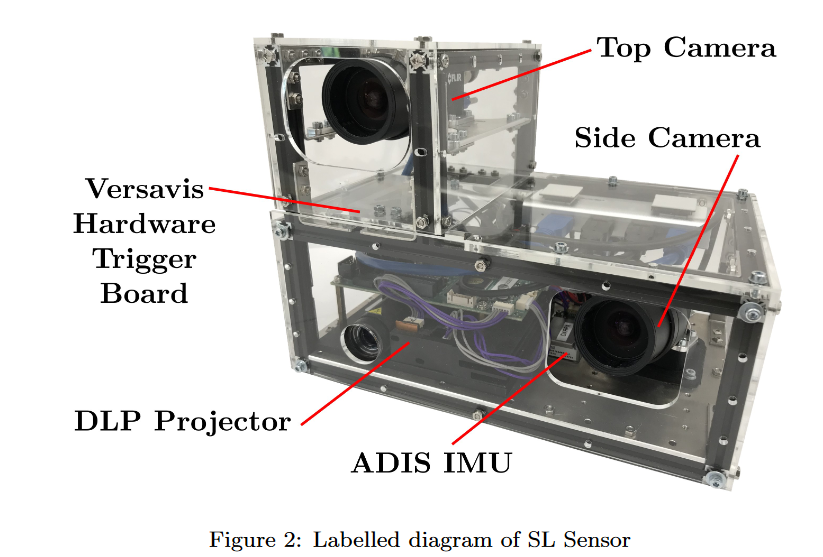
硬件系統結構 硬件系統包含兩個工業CMOS彩色攝像頭(1440×1080)和一個DLP投影儀(912×1140)。攝像機和投影儀是由Versavis板完成觸發與時間同步。另外額外的IMU為未來的運動補償策略做準備。其測量范圍為設備前方0.3-1.0m的區域。
(二)軟件系統
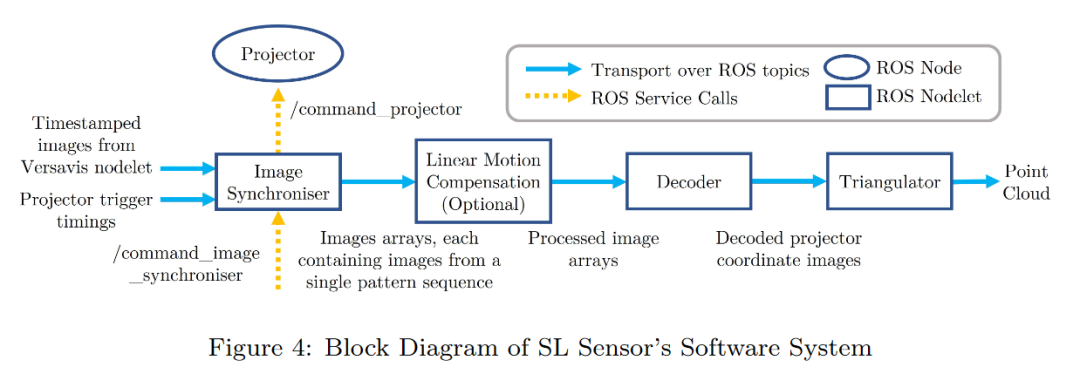
軟件系統結構 軟件系統在機器人操作系統(ROS)的框架規范下編寫,這確保了它可以輕松地與其他ROS社區的功能組件完成交互與集成。 整個三維重建流程分為四個節點,其在較有效率的零拷貝指針來傳遞進程之間的圖像的同時保證了各個部分的模塊性。部分Decoder與Triangular節點繼承了SLStudio中的代碼。
分析評估
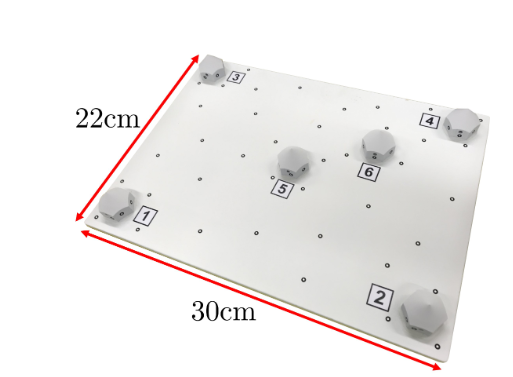
(一)靜態精度測試


(二)運動滑軌實驗
(三)噴涂場景實驗


總結
在這項工作中,我們提出了一種結構光三維重建解決方案。與現有傳感器解決方案相比,我們的SL Sensor集成了ROS中間件框架上的現有機器人軟件,以定制化實現3D掃描。我們分別介紹了了軟件架構、硬件設置和校準程序,并驗證傳感器達到毫米級精度。我們將其與常用的傳感器進行了比較,實驗結構表明我們的傳感器達到了精細化施工應用的精度要求。之后我們驗證了我們的運動補償策略的有效性-在線性運動下高精度PSP掃描,并展示了我們的傳感器在真實環境運動下根據實際情況進行模式切換的能力。未來的工作將擴展SL Sensor的掃描能力由線性運動到任意6自由度運動。可能的解決方案包括更穩健的運動補償策略或自適應模式投影,當傳感器處于靜態并切換到當檢測到運動時,另一種模式更能適應運動場景。此外,可能研究多方法點云配準以減少掃描過程中的錯誤積累,以獲得更準確的點云合并結果。
審核編輯:郭婷
-
機器人
+關注
關注
213文章
29667瀏覽量
212521 -
攝像機
+關注
關注
3文章
1699瀏覽量
61297 -
投影儀
+關注
關注
4文章
890瀏覽量
44039
原文標題:SL-Sensor:基于結構光的高精度開源三維重建系統(arxiv2022)
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
航天宏圖全棧式3DGS實景三維重建系統解決方案

激光三維掃描技術:無噴粉條件下高反光表面三維重建的光學原理與應用
非接觸式激光三維掃描應對鏡面反射表面的無噴粉測量方案:原理與創新

VirtualLab:光學系統的三維可視化
奧比中光助力創想三維登頂世界消費級3D掃描儀市場
使用DLP LightCrafter4500投影結構光進行三維重建遇到的疑問求解
在結構光三維成像方面DLP LightCrafter 4500如何連續投射彩色圖?
三維測量在醫療領域的應用
三維激光測量系統的優勢
三維測量技術在工業中的應用
CASAIM與邁普醫學達成合作,三維掃描技術助力醫療輔具實現高精度三維建模和偏差比對
建筑物邊緣感知和邊緣融合的多視圖立體三維重建方法

留形科技借助NVIDIA平臺提供高效精確的三維重建解決方案
基于大模型的仿真系統研究一——三維重建大模型

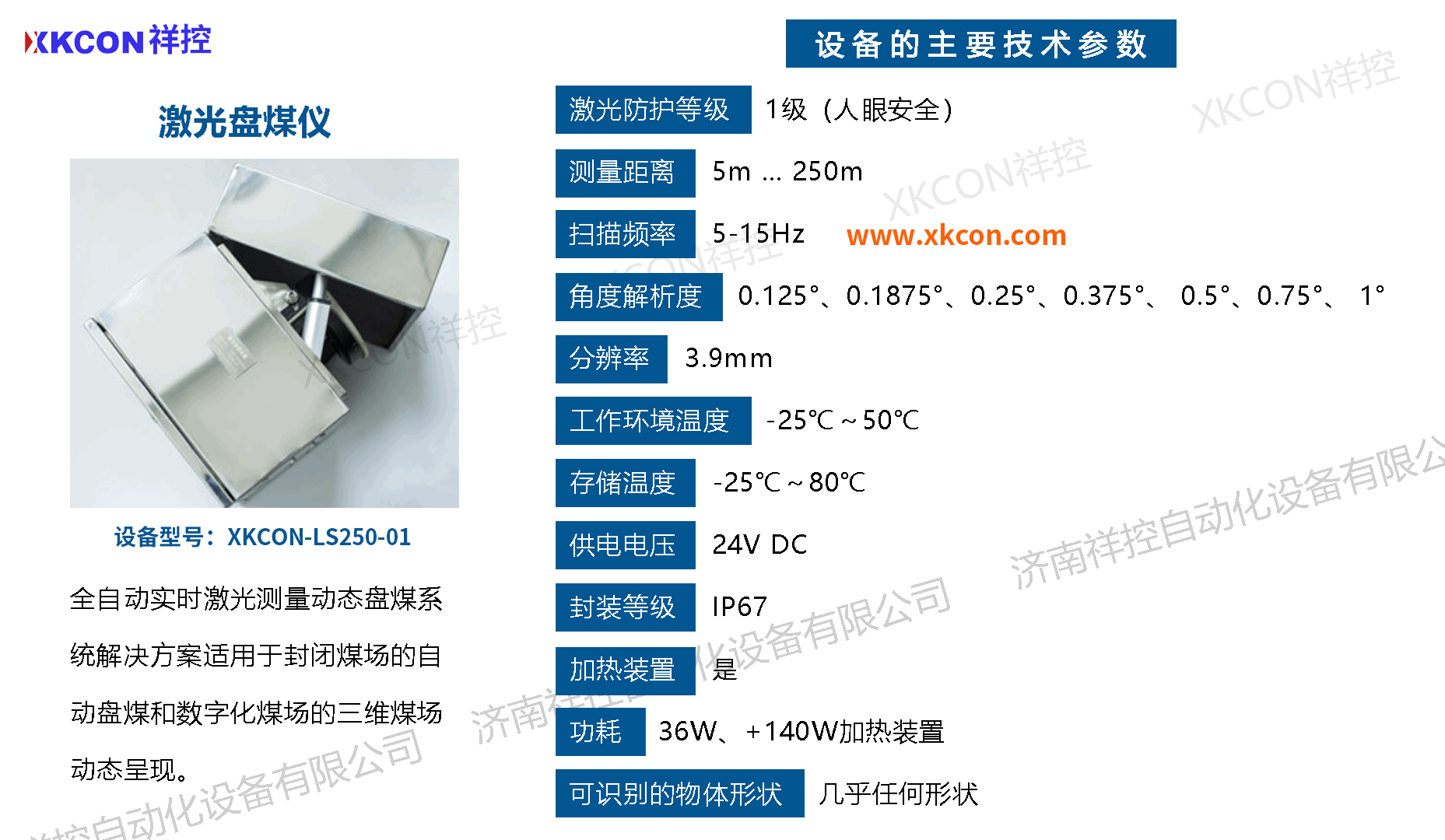
基于三維激光掃描技術的XKCON祥控激光盤煤儀可高精度、快速、全覆蓋盤煤,相對精度優于0.5‰





 工商網監
工商網監
評論