") 如何在PMSM中建立合適的坐標(biāo)系(一)
如何在PMSM中建立合適的坐標(biāo)系(一)

Clarke變換是“矢量坐標(biāo)變換”中的一種變換方式,在永磁同步電機(jī)中,電動(dòng)機(jī)的定子磁場是由定子的三相繞組的磁動(dòng)勢(shì)產(chǎn)生的,根據(jù)電動(dòng)機(jī)旋轉(zhuǎn)磁場理論就知,向?qū)ΨQ的三相繞組中通以對(duì)稱的三相正弦電流時(shí),就會(huì)產(chǎn)生合成的磁動(dòng)勢(shì),并以w的速度在空間中旋轉(zhuǎn)。所以,為了簡化交流電機(jī)的分析方法,Clarke提出了一種以電機(jī)定子為靜止參考系的電機(jī)參數(shù)變換分析方式,即依據(jù)功率不變和磁勢(shì)不變的原理,將定子三相物理量從三維坐標(biāo)轉(zhuǎn)換到二維坐標(biāo),簡稱3S/2S變換,其中S表示靜止。
在PMSM中建立合適的坐標(biāo)系
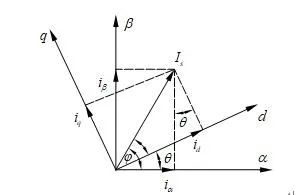
圖1-1中兩個(gè)坐標(biāo)系,其中ABC是PMSM靜止坐標(biāo)系,另一個(gè)坐標(biāo)系是PMSM經(jīng)過Clarke要變換后的坐標(biāo)系:
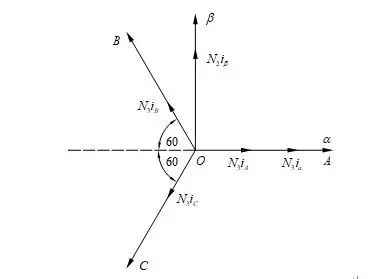
圖1-1 Clarke坐標(biāo)變換示意圖
圖1-1中PMSM三相繞組每相的有效線圈匝數(shù)為N3,兩相繞組每相有效線圈匝數(shù)為N2,兩種坐標(biāo)系中每相的磁動(dòng)勢(shì)均為有效線圈匝數(shù)與該相電流的乘積。
原理分析
矢量坐標(biāo)變換就是用磁勢(shì)或者電流空間矢量來描述等效的三相磁場、兩相磁場和旋轉(zhuǎn)直流磁場,并對(duì)它們進(jìn)行坐標(biāo)變換。因此矢量坐標(biāo)變化必須要遵循以下兩個(gè)原則:
1、變換前后電流所產(chǎn)生的旋轉(zhuǎn)磁場等效;
2、變換前后兩系統(tǒng)的電動(dòng)機(jī)功率不發(fā)生變化。
根據(jù)矢量變換原則,Clarke變換前后的磁場應(yīng)該完全等效,即合成的磁勢(shì)矢量分別在兩個(gè)坐標(biāo)系坐標(biāo)軸上的投影應(yīng)該相等。設(shè)磁動(dòng)勢(shì)是正弦分布的,當(dāng)三相總磁動(dòng)勢(shì)與兩相總磁動(dòng)勢(shì)相等時(shí),兩套繞組瞬時(shí)磁動(dòng)勢(shì)在兩相坐標(biāo)系上的投影都應(yīng)相等。
因此根據(jù)圖1-1可以得出磁勢(shì)守恒的式子為:

將式(1.1)變形又可化為矩陣形式為:

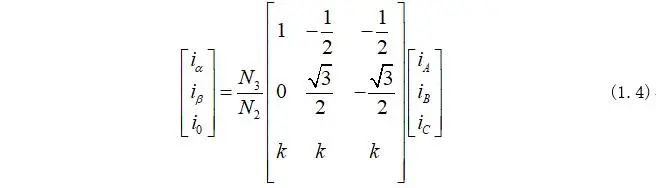
因?yàn)槭?1.2)中矩陣不是方陣不能求的逆矩陣,所以需要引入新變量零軸電流:

將式(1.3)和式(1.2)合并可以得到兩相坐標(biāo)系方程為:
所以定義Clarke矩陣為:
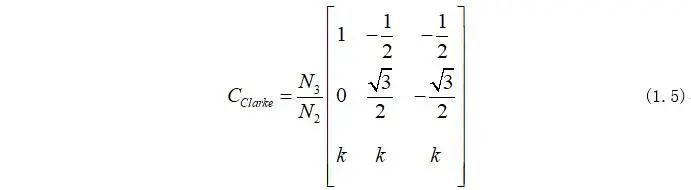
Clarke最終表達(dá)形式
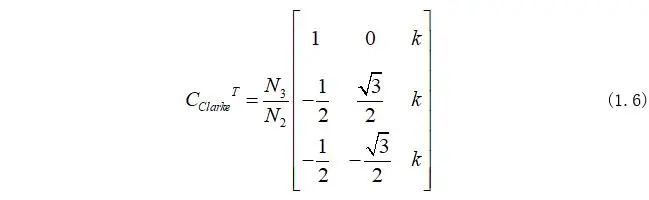
其中Clarke矩陣的轉(zhuǎn)置矩陣為:
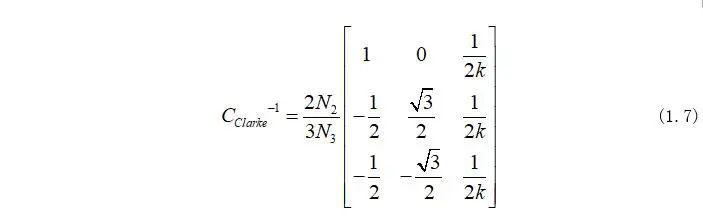
Clarke矩陣的逆矩陣為:
在Clarke變換下需要保證發(fā)電機(jī)的輸出功率在變換前后不能發(fā)生變換,因此計(jì)算公式為:
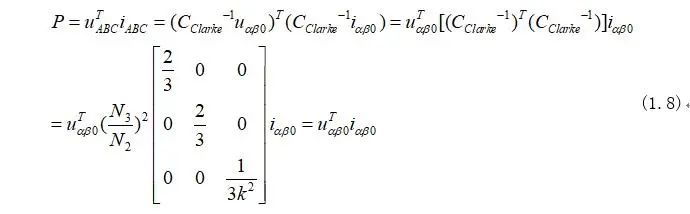
由式(1.8)可知,為了確保變換前后輸出功率不變化,可以其中參數(shù)求得:

因此,Clarke變換式為:
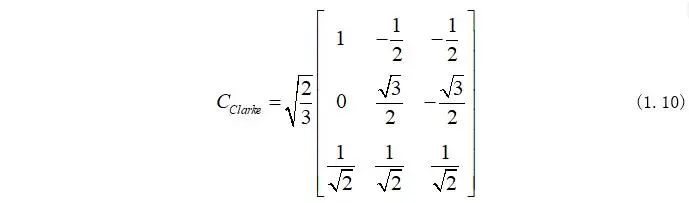
如果忽略零軸變量,那么Clarke變換式又可化為:

Clarke如何應(yīng)用
如何得到永磁同步電機(jī)在靜止兩相坐標(biāo)的電機(jī)電壓方程?
永磁同步電機(jī)的定子電壓方程在三相靜止坐標(biāo)系下為:

將式(1.12)乘以Clarke矩陣可以得到永磁同步電機(jī)在兩相靜止坐標(biāo)系下的電機(jī)電壓方程為:

-
電動(dòng)機(jī)
+關(guān)注
關(guān)注
75文章
4159瀏覽量
98583 -
坐標(biāo)系
+關(guān)注
關(guān)注
0文章
29瀏覽量
7473 -
PMSM
+關(guān)注
關(guān)注
14文章
248瀏覽量
42651 -
坐標(biāo)變換
+關(guān)注
關(guān)注
0文章
19瀏覽量
6957 -
CLARKE
+關(guān)注
關(guān)注
0文章
6瀏覽量
6803
發(fā)布評(píng)論請(qǐng)先 登錄
MATLAB建立和控制圖形窗口和坐標(biāo)系命令
vision Assitant 建立坐標(biāo)系(模板匹配)
labview 視覺機(jī)器人抓取工件 CCD相機(jī)的二維坐標(biāo)系的建立
如何建立坐標(biāo)系
坐標(biāo)系與ROI同步旋轉(zhuǎn)問題
labwindows/cvi中,請(qǐng)問如何在canvas控件上畫一個(gè)扇形的極坐標(biāo)系?
A、B、C三相坐標(biāo)系中PMSM數(shù)學(xué)模型定子電壓方程
PMSM的坐標(biāo)系和數(shù)學(xué)模型
坐標(biāo)系與魚雷運(yùn)動(dòng)參數(shù)

如何在PMSM中建立合適的坐標(biāo)系(二)
自動(dòng)駕駛各個(gè)坐標(biāo)系

三坐標(biāo)如何建立坐標(biāo)系?

世界坐標(biāo)系、相機(jī)坐標(biāo)系、圖像坐標(biāo)系、像素坐標(biāo)系之間的關(guān)系

應(yīng)用衛(wèi)星通信領(lǐng)域的一個(gè)坐標(biāo)轉(zhuǎn)換過程—機(jī)體坐標(biāo)系與ENU坐標(biāo)系的轉(zhuǎn)換






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論