") freeRTOS中的消息郵箱
freeRTOS中的消息郵箱
**1、freeRTOS中的消息郵箱 **
freeRTOS實現(xiàn)的消息郵箱是基于任務通知方式而實現(xiàn)的。
采用這種方式有什么優(yōu)勢呢?
從官方給出的測試報告中有說明到,喚醒由于信號量和事件標志組而處于阻塞態(tài)的任務,消息郵箱的速度會提升大約 45%,而且這種方式需要的 RAM 空間更小。
freeRTOS中的消息郵箱使用是比較靈活的,它可以實現(xiàn)二值信號量、計數(shù)信號量、事件標志組、消息隊列等通知方式。
但用這種 方式實現(xiàn)信號量和事件標志組也有它的局限性,主要表現(xiàn)在以下兩個方面:
1)任務通知方式僅可以用在只有一個任務等待信號量,消息郵箱或者事件標志組的情況。
2)如果使用任務通知方式實現(xiàn)消息郵箱替代消息隊列時,發(fā)送消息的任務是不支持超時等待的。在消息隊列中,當數(shù)據(jù)已經(jīng)滿時,是可以等待消息隊列有空間才存新的數(shù)據(jù)的,但是任務通知方式實現(xiàn)的消 息郵箱就不支持超時等待。
2、有關freeRTOS中的任務控制塊
freeRTOS中的每一個任務都有一個任務控制塊,而任務控制塊本質就是一個結構體變量,用于記錄任務的相關的消息。
而在結構體變量中有一個32位的變量成員ulNotifiedValue是可以專門用于任務通知的。這個變量可以實現(xiàn)計數(shù)信號量,二值信號量,事件標志組和消息郵箱(消息郵箱就是消息隊 列長度為 1 的情況)。
ulNotifiedValue 實現(xiàn)的:
1)設置接收任務控制塊中的變量 ulNotifiedValue 可以實現(xiàn)消息郵箱。
2)如果接收任務控制塊中的變量 ulNotifiedValue 還沒有被其接收到,也可以用新數(shù)據(jù)覆蓋原有數(shù)據(jù) ,這就是 覆蓋方式的消息郵箱 。
3)設置接收任務控制塊中的變量 ulNotifiedValue 的 bit0-bit31 數(shù)值可以實現(xiàn)事件標志組。
4)設置接收任務控制塊中的變量 ulNotifiedValue 數(shù)值進行加一或者減一操作可以實現(xiàn)計數(shù)信號量和二 值信號量。
3、freeRTOS中消息郵箱的管理API函數(shù)
消息郵箱實現(xiàn)的相關API函數(shù):
3.1、消息郵箱的創(chuàng)建
freeRTOS中的消息郵箱是用于任務之間的一種通知方式,它的使用是不需要像信號量這樣要專門創(chuàng)建的。是直接發(fā)送通知的。
3.2、消息郵箱的發(fā)送
1)在任務函數(shù)中發(fā)送
函數(shù)原型:
BaseType_t xTaskNotify( TaskHandle_t xTaskToNotify, /* 任務句柄 */
uint32_t ulValue, /* 更新任務控制塊中的變量 ulNotifiedValue */
eNotifyAction eAction ); /* 任務通知模式設置 */
函數(shù)描述:
第 1 個參數(shù)是任務句柄。
第 2 個參數(shù)是用來更新任務控制塊中的 32 位變量 ulNotifiedValue。
第 3 個參數(shù)是任務通知模式設置,支持以下 5 個參數(shù):
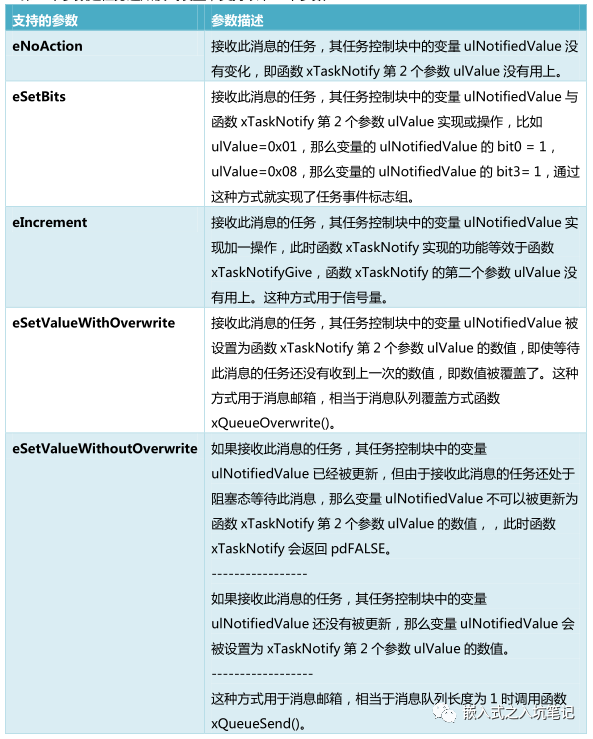
返回值,根據(jù)上面第3個參數(shù)的說明,將其設置為 :
eSetValueWithoutOverwrite ,有可能返回 pdFALSE,其余所有情況都返回值 pdPASS。
使用這個函數(shù)要注意以下問題:
1)任務創(chuàng)建后,任務控制塊中的變量 ulNotifiedValue 初始計數(shù)值是 0。
2)默認配置此函數(shù)可以使用的的宏定義已經(jīng)在 FreeRTOS.h 文件中使能:
#define configUSE_TASK_NOTIFICATIONS 1
當然,如果不需要使用任務通知功能相關的函數(shù),可以在 FreeRTOSConfig.h 文件中配置此宏定 義為 0 來禁止,這樣創(chuàng)建的每個任務可以節(jié)省 8 個字節(jié)的需求。
3)此函數(shù)是用于任務代碼中調用的,故不可以在中斷服務程序中調用此函數(shù),中斷服務程序中使用的是 xTaskNotifyFromISR。
4)根據(jù) FreeRTOS 的建議,實現(xiàn)二值信號量和計數(shù)信號量時使用函數(shù) xTaskNotifyGive()替代此函數(shù) xTaskNotify()。
2)在中斷中發(fā)送
函數(shù)原型:
BaseType_t xTaskNotifyFromISR( TaskHandle_t xTaskToNotify, /* 任務句柄 */
uint32_t ulValue, /* 更新任務控制塊中的變量 ulNotifiedValue */
eNotifyAction eAction, /* 任務通知模式設置 */
BaseType_t *pxHigherPriorityTaskWoken ); /* 高優(yōu)先級任務是否被喚醒的狀態(tài)保存 */
函數(shù)描述:
函數(shù) xTaskNotifyFromISR 通過設置任務控制塊中的變量 ulNotifiedValue 可以在中斷服務程序中實現(xiàn)任 務事件標志組,任務計數(shù)信號量,任務消息郵箱和任務二值信號量四種方式的消息通知。
第 1 個參數(shù)是任務句柄。
第 2 個參數(shù)是用來更新任務控制塊中的 32 位變量 ulNotifiedValue。
第 3 個參數(shù)是任務通知模式設置,支持以下 5 個參數(shù):


第4個參數(shù)用于保存是否有高優(yōu)先級任務準備就緒。如果函數(shù)執(zhí)行完畢后,此參數(shù)的數(shù)值是 pdTRUE , 說明有高優(yōu)先級任務要執(zhí)行,否則沒有。
返回值,根據(jù)上面第 3 個參數(shù)的說明,將其設置為:
eSetValueWithoutOverwrite ,有可能返回 pdFALSE ,其余所有情況都返回值 pdPASS 。
使用這個函數(shù)要注意以下問題:
- 任務創(chuàng)建后,任務控制塊中的變量** ulNotifiedValue **初始計數(shù)值是 0。
- 默認配置此函數(shù)可以使用的的宏定義已經(jīng)在 FreeRTOS.h 文件中使能:
#define configUSE_TASK_NOTIFICATIONS 1
當然,如果用戶不需要使用任務通知功能相關的函數(shù),可以在 FreeRTOSConfig.h 文件中配置此宏定 義為 0 來禁止,這樣創(chuàng)建的每個任務可以節(jié)省 8 個字節(jié)的需求。
3)此函數(shù)是用于中斷服務程序中調用的,故不可以在任務代碼中調用此函數(shù),任務代碼中使用的是 xTaskNotify。
4)FreeRTOS 的建議,實現(xiàn)二值信號量和計數(shù)信號量時使用函數(shù) vTaskNotifyGiveFromISR ()替代 此函數(shù) xTaskNotifyFromISR ()。
3.3、等待消息郵箱
(1)等待消息郵箱
函數(shù)原型:
BaseType_t xTaskNotifyWait(
/* 設置函數(shù)執(zhí)行前清零任務控制塊中變量 ulNotifiedValue 那些位 */
uint32_t ulBitsToClearOnEntry,
/*設置函數(shù)退出前清零任務控制塊中變量 ulNotifiedValue 那些位 */
uint32_t ulBitsToClearOnExit,
/* 保存任務控制塊中的變量 ulNotifiedValue 到指針變量 pulNotifiedValue 所指向的存儲單元 */
uint32_t *pulNotificationValue,
/* 等待消息通知的最大等待時間 */
TickType_t xTicksToWait
);
函數(shù)描述:
函數(shù) xTaskNotifyWait 可以在任務代碼中實現(xiàn)任務事件標志組,任務計數(shù)信號量,任務消息郵箱和任務二 值信號量四種方式的消息獲取。
第 1 個參數(shù) ulBitsToClearOnEntry 用于函數(shù)執(zhí)行之前,將任務控制塊中的變量 ulNotifiedValue 進 行如下操作 :
ulNotifiedValue &= ~ulBitsToClearOnEntry
簡單的說就是參數(shù) ulBitsToClearOnEntry 哪個位是 1,那么變量 ulNotifiedValue 的那個位就會被 清零。比如 ulBitsToClearOnEntry = 0x01 表示將變量 ulNotifiedValue 的 bit0 清零,又比如 ulBitsToClearOnEntry = 0xffffffff 表示將變量 ulNotifiedValue 的所有位清零。
第 2 個參數(shù) ulBitsToClearOnExit 用于函數(shù)退出前,將任務控制塊中的變量 ulNotifiedValue 進行如 下操作 :
ulNotifiedValue &= ~ ulBitsToClearOnExit
簡單的說就是參數(shù) ulBitsToClearOnExit 哪個位是 1,那么變量 ulNotifiedValue 的那個位就會被清 零。比如 ulBitsToClearOnExit= 0x01 表示將變量 ulNotifiedValue 的 bit0 清零,又比如 ulBitsToClearOnExit= 0xffffffff 表示將變量 ulNotifiedValue 的所有位清零。
第 3 個參數(shù)用于將任務控制塊中的變量 ulNotifiedValue 保存到此參數(shù)指針所指向的存儲單元。如果 此參數(shù)沒有用上,可以將其設置為 NULL。
第 4 個參數(shù)是沒有消息時,等待消息的最大等待時間,單位系統(tǒng)時鐘節(jié)拍。
返回值,如果成功接收到消息返回 pdTRUE,否則返回 pdFALSE,比如在設置的超時時間內沒有收 到消息。
使用這個函數(shù)要注意以下問題:
1)任務創(chuàng)建后,任務控制塊中的變量 ulNotifiedValue 初始計數(shù)值是 0。
2)默認配置此函數(shù)可以使用的的宏定義已經(jīng)在 FreeRTOS.h 文件中使能:
#define configUSE_TASK_NOTIFICATIONS 1
當然,如果用戶不需要使用任務通知功能相關的函數(shù),可以在 FreeRTOSConfig.h 文件中配置此宏定 義為 0 來禁止,這樣創(chuàng)建的每個任務可以節(jié)省 8 個字節(jié)的需求。
3)如果用戶將 FreeRTOSConfig.h 文件中的宏定義 INCLUDE_vTaskSuspend 配置為 1 且第 2 個參數(shù)配 置為:
portMAX_DELAY ,那么此函數(shù)會永久等待直到消息可用。
4)根據(jù) FreeRTOS 的建議,實現(xiàn)二值信號量和計數(shù)信號量時使用函數(shù) ulTaskNotifyTake ()替代此函數(shù) xTaskNotifyWait ()。
4、消息郵箱的應用示例
為了更好的說明freeRTOS中的消息郵箱的使用。下面給出了一個簡單的示例。
代碼思路如下:
創(chuàng)建3個任務:start_task,led0_task,led2_task。start_task任務用于創(chuàng)建led0_task和led2_task任務,led0_task任務判斷按鍵的情況,然后根據(jù)按鍵按下,消息郵箱發(fā)送不同的消息到任務led2_task,在這個任務中改變LED2和LED3的狀態(tài)。代碼示例如下:
void start_task(void *pvParameters)
{
pvParameters = pvParameters;
taskENTER_CRITICAL(); //進入臨界區(qū)
xTaskCreate((TaskFunction_t) led0_task,
(const char*) "led0_task",
(uint16_t) TASK_STK_LED0_SIZE,
(void*) NULL,
(UBaseType_t) TASK_LED0_PRIO,
(TaskHandle_t*) &LED0_Handler );
xTaskCreate((TaskFunction_t) led2_task,
(const char*) "led2_task",
(uint16_t) TASK_STK_LED2_SIZE,
(void*) NULL,
(UBaseType_t) TASK_LED2_PRIO,
(TaskHandle_t*) &LED2_Handler );
vTaskDelete(StartTask_Handler); //刪除開始任務
taskEXIT_CRITICAL(); //退出臨界區(qū)
}
void led0_task(void *pvParameters)
{
//pvParameters = pvParameters;
BaseType_t err = pdFALSE;
uint32_t MboxValue=0;
for(;;)
{
if(gd_eval_key_state_get(KEY_WAKEUP) == RESET)
{
MboxValue = 10;
err = xTaskNotify((TaskHandle_t ) LED2_Handler, //任務句柄,指明往哪個任務發(fā)送消息,很重要
(uint32_t ) MboxValue, //發(fā)送的消息
(eNotifyAction) eSetValueWithOverwrite //消息發(fā)送方式
);
}
else if(gd_eval_key_state_get(KEY_TAMPER) == RESET)
{
MboxValue = 50;
err = xTaskNotify((TaskHandle_t ) LED2_Handler, //任務句柄
(uint32_t ) MboxValue, //發(fā)送的消息
(eNotifyAction) eSetValueWithOverwrite //消息發(fā)送方式
);
}
else{}
gd_eval_led_toggle(LED4);
vTaskDelay(200);
}
}
void led2_task(void *pvParameters)
{
//pvParameters = pvParameters;
uint32_t notifyValue = 0;
BaseType_t err;
for(;;)
{
err = xTaskNotifyWait((uint32_t ) 0x00, //進入函數(shù)時不清楚bit
(uint32_t) 0xffffffff, //退出函數(shù)時清除所有的bit
(uint32_t*) ¬ifyValue, //保存消息的內容
(TickType_t) portMAX_DELAY //阻塞時間
);
if(err == pdTRUE)
{
switch(notifyValue)
{
case 10:
gd_eval_led_toggle(LED2);
break;
case 50:
gd_eval_led_toggle(LED3);
break;
default:
break;
}
}
vTaskDelay(100);
}
}
-
FreeRTOS
+關注
關注
12文章
492瀏覽量
63917 -
信號量
+關注
關注
0文章
53瀏覽量
8522 -
消息隊列
+關注
關注
0文章
33瀏覽量
3092
發(fā)布評論請先 登錄
FreeRTOS中的任務管理
用的cube生成的freertos工程,串口和任務通過郵箱通訊,結果任務反應很慢是怎么回事?
轉:第27章 FreeRTOS任務消息郵箱
電子郵箱,電子郵箱是什么意思
RT-Thread的郵箱服務,包括郵箱工作機制、工作管理方式以及應用示例

Freertos 的移植中 “FreeRTOSConfig.h“ 的配置

基于STM32的FreeRTOS開發(fā)(1)----FreeRTOS簡介

FreeRTOS中的空閑任務是什么
uC/OS-II—郵箱介紹
SoC的核間通信機制硬件郵箱





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論