") STM32入門(mén)學(xué)習(xí)筆記之MPU6050傳感器解析實(shí)驗(yàn)1
STM32入門(mén)學(xué)習(xí)筆記之MPU6050傳感器解析實(shí)驗(yàn)1
19.1 MPU6050簡(jiǎn)介
19.1.1 芯片概述
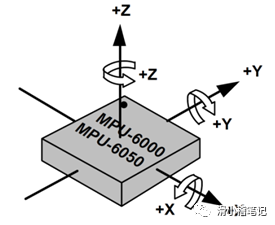
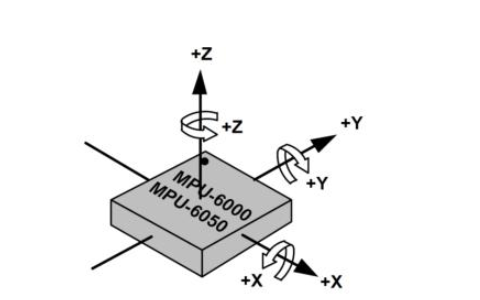
MPU6050是InvenSense公司推出的一款6軸運(yùn)動(dòng)處理芯片,內(nèi)置3軸陀螺儀及3軸速度傳感器,內(nèi)置兩組I2C接口,其中一組用于通信,另一組則用于連接外部磁力傳感器,采用自帶的數(shù)字運(yùn)動(dòng)處理器DMP(Digital Motion Processor),通過(guò)主I2C接口,直接讀取完整的9軸融合演算數(shù)據(jù)。MPU6050檢測(cè)軸及其檢測(cè)方向如下圖所示。
19.1.2 引腳介紹
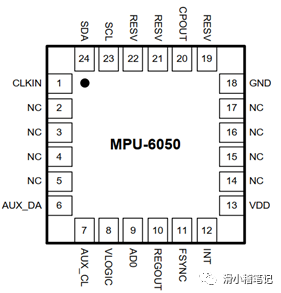
MPU6050采用QFN-24封裝,端口描述如下表所示。
| 引腳編號(hào) | 引腳名稱(chēng) | 功能 |
|---|---|---|
| 1 | CLKIN | 外部參考時(shí)鐘輸入,如果不使用直接接地 |
| 2 | NC | 空引腳 |
| 3 | NC | 空引腳 |
| 4 | NC | 空引腳 |
| 5 | NC | 空引腳 |
| 6 | AUX_DA | 從I2C接口數(shù)據(jù)口,用于連接磁傳感器的SDA組成九軸傳感器 |
| 7 | AUX_CL | 從I2C接口時(shí)鐘口,用于連接磁傳感器的SCL組成九軸傳感器 |
| 8 | VLOGIC | IO口邏輯電平,最低可以設(shè)置1.8V,默認(rèn)連接VDD |
| 9 | AD0 | I2C接口地址控制端,端口為高電平默認(rèn)地址0x69,端口為低電平默認(rèn)地址0x68 |
| 10 | REGOUT | 外接穩(wěn)壓器的濾波電容 |
| 11 | FSYNC | 幀同步數(shù)字輸入,如果不使用直接接GND |
| 12 | INT | 中斷信號(hào)輸出(可以配置為開(kāi)漏輸出) |
| 13 | VDD | 電源正極,供電范圍0.5V~6VDC |
| 14 | NC | 空引腳 |
| 15 | NC | 空引腳 |
| 16 | NC | 空引腳 |
| 17 | NC | 空引腳 |
| 18 | GND | 電源地 |
| 19 | RESV | 保留 |
| 20 | CPOUT | 外部電荷泵電容 |
| 21 | RESV | 保留 |
| 22 | RESV | 保留 |
| 23 | SCL | 主I2C接口時(shí)鐘 |
| 24 | SDA | 主I2C接口數(shù)據(jù) |
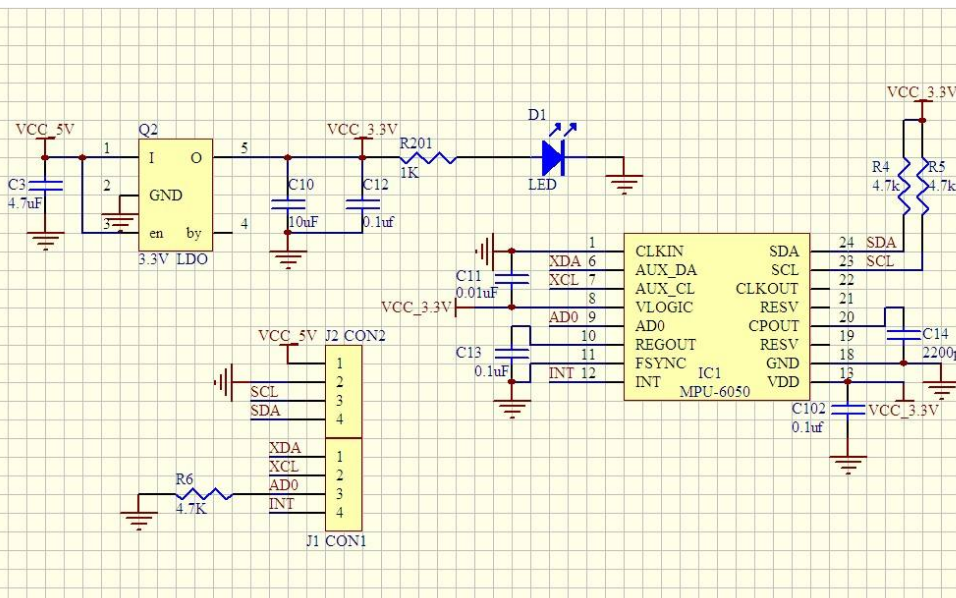
19.1.3 硬件電路
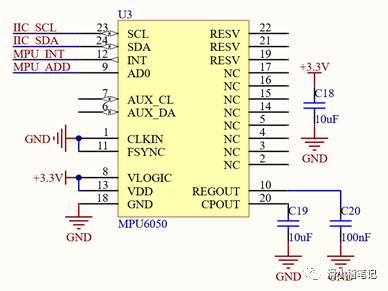
由于MPU6050內(nèi)部是可以自動(dòng)計(jì)算X,Y和Z軸的方向及加速度的,使用者可以不考慮實(shí)際的數(shù)據(jù)轉(zhuǎn)換問(wèn)題,但是為了詳細(xì)的了解MPU6050的計(jì)算過(guò)程,使用者最好還是應(yīng)該具備了解原始數(shù)據(jù)如何轉(zhuǎn)換為我們需要的角度與加速度值。
19.2 姿態(tài)解算與融合算法基礎(chǔ)概念
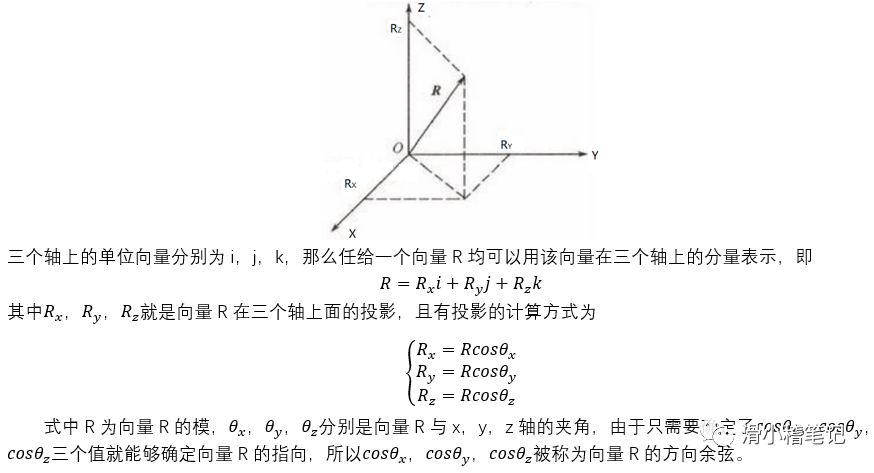
19.2.1 方向矩陣
設(shè)有一個(gè)三位直角坐標(biāo)系Oxyz,如下圖所示。
19.2.2 方向余弦矩陣
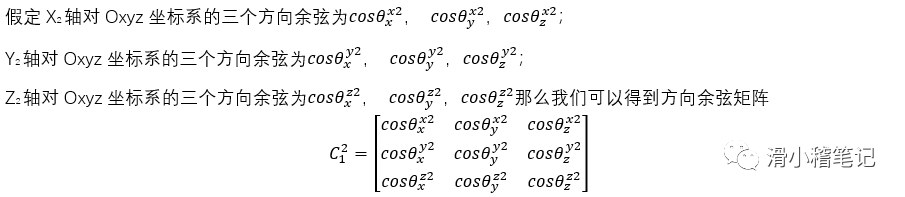
19.2.3 歐拉角
歐拉角是用于確定定點(diǎn)轉(zhuǎn)動(dòng)缸體位置的3個(gè)1組的獨(dú)立角參量,由章動(dòng)角θ,旋轉(zhuǎn)角(進(jìn)動(dòng)角)ψ和自轉(zhuǎn)角φ組成,歐拉角有多種取法,下面是比較常見(jiàn)的一種。
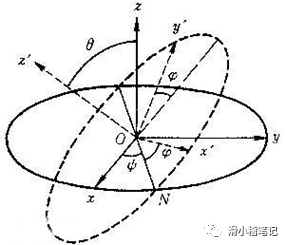
如上圖所示,由定點(diǎn)O做出固定坐標(biāo)系Oxyz以及固定連在剛體的坐標(biāo)系Ox’y’z’,以軸Oz和Oz’為基本軸。其垂直面Oxy和Ox’y’為基本平面,由軸Oz量到Oz’的角度θ稱(chēng)為章動(dòng)角,平面zOz’的垂線ON稱(chēng)為節(jié)線,同時(shí)ON又是基本平面Ox’y’和Oxy的交線,在右手坐標(biāo)系中,由ON的正端看,角θ應(yīng)按照逆時(shí)針?lè)较蛴?jì)算,由固定軸Ox到節(jié)線ON的角度ψ稱(chēng)為進(jìn)動(dòng)角,也叫作旋轉(zhuǎn)角,由節(jié)線ON到動(dòng)軸Ox’的角度φ稱(chēng)為自轉(zhuǎn)角,有Oz和Oz’正端看,進(jìn)動(dòng)角ψ與自轉(zhuǎn)角φ也應(yīng)該按照逆時(shí)針?lè)较蛴?jì)算。
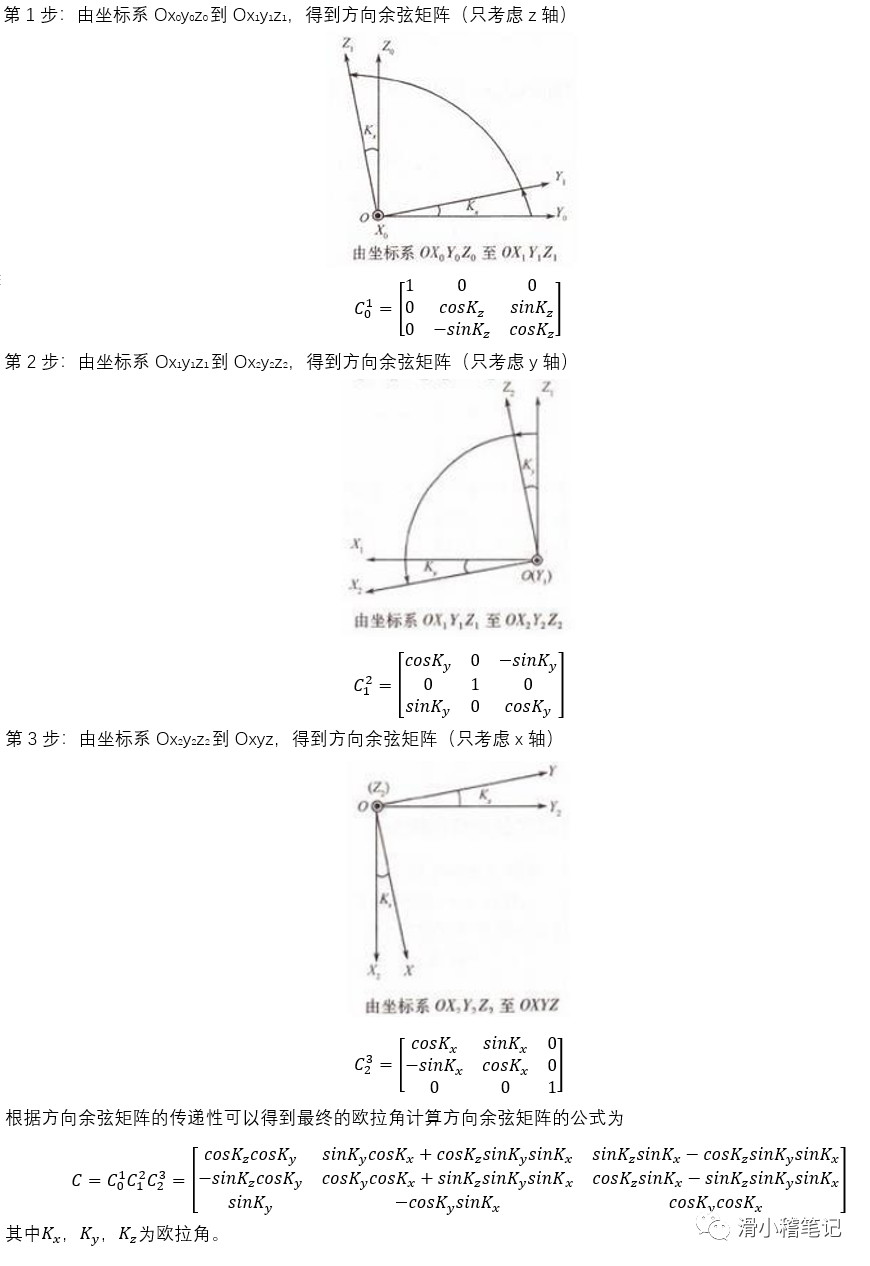
從上面的描述過(guò)程可以發(fā)現(xiàn),歐拉角實(shí)際是可以分解成三步來(lái)計(jì)算的:
第1步:繞z軸旋轉(zhuǎn)α,使得x軸與N軸重合
第2步:繞x軸旋轉(zhuǎn)β,使z軸與旋轉(zhuǎn)后的z軸重合
第3步:繞z軸旋轉(zhuǎn)y,是坐標(biāo)系與旋轉(zhuǎn)后的完全重合
根據(jù)上面的三個(gè)步驟,我們來(lái)通過(guò)以下實(shí)例來(lái)說(shuō)明歐拉角與方向余弦矩陣的轉(zhuǎn)換過(guò)程。
19.2.4 四元數(shù)與歐拉角的轉(zhuǎn)換
四元數(shù)是一個(gè)簡(jiǎn)單的超復(fù)數(shù),是由實(shí)數(shù)加上三個(gè)虛數(shù)單位i,j,k組成,每個(gè)四元數(shù)都是1,i,j,k的線性組合,四元數(shù)是愛(ài)爾蘭數(shù)學(xué)家哈密頓在1843年發(fā)明的數(shù)學(xué)概念,四元數(shù)的乘法不符合交換律。
四元數(shù)姿態(tài)表達(dá)式是一個(gè)四參數(shù)的表達(dá)式,它的基本思路是一個(gè)坐標(biāo)系轉(zhuǎn)換到另一個(gè)坐標(biāo)系可以通過(guò)繞一個(gè)定義在參考系中的矢量μ的單次轉(zhuǎn)動(dòng)來(lái)實(shí)現(xiàn),四元數(shù)用符號(hào)q表示,是一個(gè)具有4個(gè)元素的矢量,這些元素是該矢量方向和轉(zhuǎn)動(dòng)大小的函數(shù)。定義四元數(shù)如下所示。

這里直接給出結(jié)論,不作證明。會(huì)用即可。四元數(shù)與歐拉角的轉(zhuǎn)換公式為:

用方向余弦表示歐拉角,這里歐拉角不允許等于90度。

用四元數(shù)表示歐拉角

在姿態(tài)解算中常用的算法由歐拉角法,方向余弦法和四元數(shù)法,歐拉角在求解姿態(tài)時(shí)存在奇點(diǎn),無(wú)法用于全姿態(tài)結(jié)算,方向余弦沒(méi)有奇點(diǎn),但是計(jì)算量大,無(wú)法滿足實(shí)時(shí)性要求,四元數(shù)法,計(jì)算量小,無(wú)奇點(diǎn)可以滿足飛行器運(yùn)動(dòng)過(guò)程中姿態(tài)的實(shí)時(shí)解算,姿態(tài)解算的原理是對(duì)于一個(gè)確定的向量,用不同的坐標(biāo)系表示時(shí),他們所表示的大小和方向一定是相同的。但是由于這兩個(gè)坐標(biāo)系的旋轉(zhuǎn)矩陣存在誤差,那么當(dāng)一個(gè)向量經(jīng)過(guò)一個(gè)有誤差存在的旋轉(zhuǎn)矩陣后,在另一個(gè)坐標(biāo)系中肯定和理論值是有偏差的,我們通過(guò)這個(gè)偏差來(lái)修正這個(gè)旋轉(zhuǎn)矩陣。這個(gè)旋轉(zhuǎn)矩陣的元素是四元數(shù),我們修正的就是四元數(shù),以此來(lái)修正姿態(tài)。
19.3 實(shí)驗(yàn)例程
實(shí)驗(yàn)內(nèi)容:利用MPU6050采集到數(shù)據(jù)獲取歐拉角顯示在TFTLCD上。
19.3.1 MPU6050內(nèi)部相關(guān)寄存器
(1) 電源管理寄存器1 (地址0x6B)
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| DEVICE_RST | SLEEP | CYCLE | - | TEMP_DIS | CLKSEL[2:0] |
Bit 7:軟件復(fù)位
0:不復(fù)位MPU6050
1:復(fù)位MPU6050
Bit 6:休眠模式
0:正常工作模式
1:睡眠模式
Bit 5:循環(huán)模式
0:默認(rèn)狀態(tài)
1:睡眠模式與喚醒模式交替運(yùn)行
Bit 3:溫度傳感器使能
0:使能溫度傳感器
1:禁用溫度傳感器
Bit 2~Bit 0:選擇系統(tǒng)時(shí)鐘源
000:內(nèi)部8M RC時(shí)鐘源
001:PLL,使用X軸陀螺作為參考
010:PLL,使用Y軸陀螺作為參考
011:PLL,使用Z軸陀螺作為參考
100:PLL,使用外部32.768kHz作為參考
101:PLL,使用外部19.2MHz作為參考
110:保留
111:關(guān)閉時(shí)鐘,保持時(shí)序產(chǎn)生電路復(fù)位狀態(tài)
-
傳感器
+關(guān)注
關(guān)注
2564文章
52724瀏覽量
764820 -
處理器
+關(guān)注
關(guān)注
68文章
19833瀏覽量
233961 -
MPU6050
+關(guān)注
關(guān)注
39文章
310瀏覽量
72865
發(fā)布評(píng)論請(qǐng)先 登錄
STM32控制MPU6050之使用說(shuō)明
STM32解析MPU6050上位機(jī)與下位機(jī)源碼
STM32控制MPU6050之使用說(shuō)明
基于stm32的mpu6050傳感器實(shí)驗(yàn) 精選資料推薦
如何對(duì)基于stm32的mpu6050傳感器進(jìn)行測(cè)試呢
MPU6050六軸傳感器筆記分享
基于STM32單片機(jī)+MPU6050傳感器做的載人平衡車(chē)
mpu6050六軸傳感器模塊驅(qū)動(dòng)程序源代碼分享

使用STM32單片機(jī)讀取MPU6050傳感器數(shù)據(jù)的程序免費(fèi)下載
MPU6050六軸傳感器實(shí)驗(yàn)的程序和工程文件免費(fèi)下載
MPU6050六軸陀螺儀傳感器實(shí)驗(yàn)的資料合集免費(fèi)下載

基于stm32的mpu6050傳感器實(shí)驗(yàn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論