") UWB 技術(shù)為 AVP 賦能
UWB 技術(shù)為 AVP 賦能

自動(dòng)駕駛與自動(dòng)泊車
在 SAE (Society of Automotive Engineers 美國(guó)汽車工程師學(xué)會(huì)) 的定義中,自動(dòng)駕駛被劃分為 Level 0 到 Level 5 共六個(gè)等級(jí):
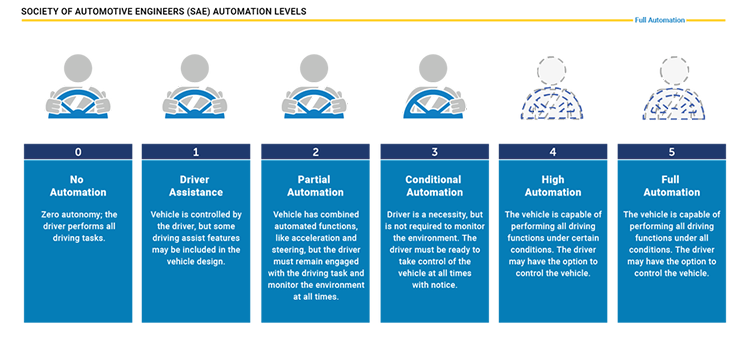
Level 0:無(wú)自動(dòng)化 ? 車輛無(wú)自動(dòng)駕駛功能,需要駕駛員完全手動(dòng)駕駛。
Level 1:駕駛輔助 ? 車輛由駕駛員控制,但具備一些初級(jí)駕駛輔助功能。
Level 2:部分自動(dòng)化 ? 車輛具備了自動(dòng)駕駛的多項(xiàng)功能,但仍需由駕駛員主導(dǎo)駕駛。
Level 3:有條件自動(dòng)化 ? 車輛具備自動(dòng)駕駛功能,駕駛員的重要性已經(jīng)降低,但駕駛員仍需時(shí)刻準(zhǔn)備接管車輛控制權(quán)。
Level 4:高度自動(dòng)化 ? 車輛在大部分場(chǎng)景下都可以實(shí)現(xiàn)自動(dòng)駕駛,駕駛員在大部分場(chǎng)景下無(wú)需關(guān)注車輛駕駛情況。
Level 5:完全自動(dòng)化 ? 車輛在所有場(chǎng)景下都可以實(shí)現(xiàn)自動(dòng)駕駛,駕駛員在所有場(chǎng)景下無(wú)需關(guān)注車輛駕駛情況。
在自動(dòng)駕駛領(lǐng)域中,自動(dòng)泊車因其低速、封閉或半封閉空間、場(chǎng)景相對(duì)固定等因素,成為了自動(dòng)駕駛領(lǐng)域最容易落地的場(chǎng)景。根據(jù)自動(dòng)化程度的不同,自動(dòng)泊車被劃分為半自動(dòng)泊車、全自動(dòng)泊車、記憶泊車、自主代客泊車四種階段:
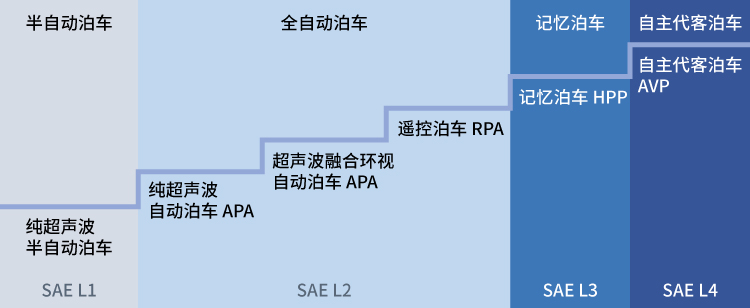
半自動(dòng)泊車
Semi-Automatic Parking Assist, S-APA ?
對(duì)應(yīng) SAE Level 1,是基于車輛四周布置的超聲波傳感器實(shí)現(xiàn)車位感知,需要駕駛員實(shí)時(shí)監(jiān)督并控制車速,操作流程復(fù)雜且用戶體驗(yàn)較差。
全自動(dòng)泊車
Full-Automatic Parking Assist, F-APA ?
對(duì)應(yīng) SAE Level 2,可實(shí)現(xiàn)對(duì)車輛橫向和縱向的自動(dòng)控制,但需要駕駛員對(duì)車輛進(jìn)行持續(xù)監(jiān)督并隨時(shí)準(zhǔn)備接管。全自動(dòng)泊車按照傳感器組成的不同,分為基于超聲波雷達(dá)的全自動(dòng)泊車和升級(jí)版基于超聲波與環(huán)境視覺(jué)融合的全自動(dòng)泊車,后者有更強(qiáng)的環(huán)境感知能力,能夠應(yīng)對(duì)更多的停車場(chǎng)景。全自動(dòng)泊車還有一種產(chǎn)品形態(tài)是遙控泊車 ( Remote Parking Assist, RPA ),在 APA 的基礎(chǔ)上增加了遙控部分,允許駕駛員在車外可視范圍內(nèi)使用遙控裝置控制車輛,能夠避免尷尬的停車后打不開車門的場(chǎng)景。
記憶泊車
Home-Zone Parking Pilot, HPP ?
對(duì)應(yīng) SAE Level 3,記憶泊車建立在全自動(dòng)泊車基礎(chǔ)之上,結(jié)合 SLAM ( Simultaneous Localization and Mapping, 即時(shí)定位與地圖構(gòu)建 ) 技術(shù),根據(jù)學(xué)習(xí)駕駛員的下車位置、停車地點(diǎn)、泊車路徑等,建立常用泊車場(chǎng)景的環(huán)境特征地圖,以便之后復(fù)現(xiàn)駕駛員的泊車路線來(lái)替代駕駛員完成停車場(chǎng)景最后一段距離的低速駕駛與車輛泊入。
自主代客泊車
Automated Valet Parking, AVP ?
對(duì)應(yīng) SAE Level 4,顯著特點(diǎn)是無(wú)需駕駛員在車內(nèi),依靠更精準(zhǔn)的感知、更強(qiáng)大的算力、更先進(jìn)的算法,自主代客泊車可實(shí)現(xiàn)智慧停車場(chǎng)內(nèi)的低速自動(dòng)駕駛、自主避障、智能搜索車位和自主車輛泊入泊出。駕駛員在智慧停車場(chǎng)指定下客點(diǎn)下車后,通過(guò)移動(dòng)終端下達(dá)泊車指令,車輛接收到指令后可自動(dòng)行駛到停車位,無(wú)需駕駛員的操縱與監(jiān)控;駕駛員通過(guò)移動(dòng)終端下達(dá)取車指令,車輛接收到指令后可從停車位自動(dòng)行駛至指定上客點(diǎn);若多輛車同時(shí)接收到泊車指令,可實(shí)現(xiàn)多車動(dòng)態(tài)的自動(dòng)等待進(jìn)入停車位;車輛自動(dòng)行駛過(guò)程中,遵循停車場(chǎng)運(yùn)營(yíng)方所制定的場(chǎng)內(nèi)交通規(guī)則。
AVP 關(guān)鍵技術(shù)
在當(dāng)前 SAE Level 4 其它場(chǎng)景落地還需要很長(zhǎng)的時(shí)間,而 AVP 作為當(dāng)前自動(dòng)泊車場(chǎng)景中的天花板,同時(shí)也是目前業(yè)內(nèi)公認(rèn)的將最先實(shí)現(xiàn)商業(yè)化應(yīng)用的 SAE Level 4 級(jí)別的自動(dòng)駕駛場(chǎng)景,AVP 能夠?qū)崿F(xiàn)全自動(dòng)的代客泊車功能,幫助駕駛員在停車場(chǎng)景中節(jié)省大量時(shí)間。
機(jī)車互聯(lián)
手機(jī)與汽車的互聯(lián),主要包含:車載控制器與網(wǎng)關(guān),T-BOX ( Telematics BOX, 遠(yuǎn)程信息處理器 ) ,云端后臺(tái)服務(wù)器,手機(jī) App。駕駛員通過(guò)手機(jī) App 訪問(wèn)云端后臺(tái)服務(wù)器,建立與車輛 T-BOX 聯(lián)系,從而激活 AVP 功能,控制車輛開始自主代客泊車模式。
尋找車位
車輛進(jìn)入停車場(chǎng),并自動(dòng)尋找車位,是 AVP 功能的核心。在沒(méi)有任何控制的情況下,車輛在停車場(chǎng)內(nèi)自動(dòng)且準(zhǔn)確地尋找到可停的車位,是 AVP 的重點(diǎn)和難點(diǎn)。尋找車位的方案一種讓車輛在停車場(chǎng)內(nèi)邊行駛邊搜索車位,一旦搜索到可用的車位,就泊入車位:另一種是在停車場(chǎng)內(nèi)安裝其它設(shè)備,將可用的車位信息和障礙物等信息發(fā)送給車輛,車輛將結(jié)合這些,規(guī)劃好行駛路徑,直接開到終點(diǎn)。值得一提的是,這種車輛與停車場(chǎng)交互信息的這種方式,可以實(shí)現(xiàn)多車路線規(guī)劃,避免排隊(duì)的情況發(fā)生。
泊入車位
車輛到達(dá)規(guī)劃車位后,進(jìn)入自動(dòng)泊車入位狀態(tài),車輛通過(guò)規(guī)劃的泊入路徑自動(dòng)完成車位泊入。
召喚車輛
駕駛員通過(guò)手機(jī) App 發(fā)出召喚指令,車輛從車位自動(dòng)駛出,行進(jìn)至指定位置,至此 AVP 全過(guò)程完成。召喚車輛可以看作是自動(dòng)泊車的相反過(guò)程。
UWB 概念淺析
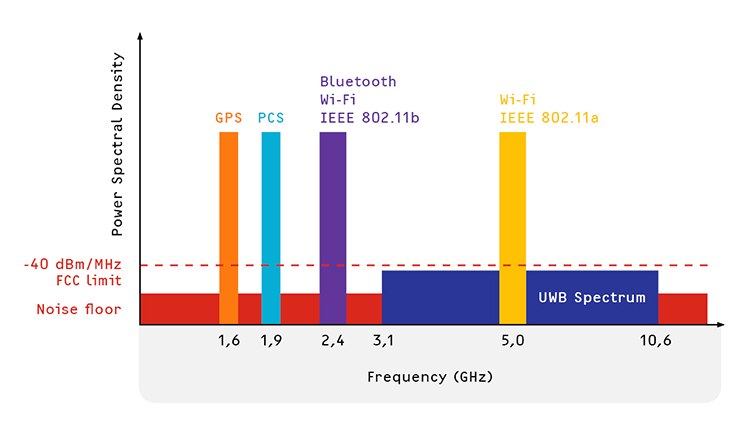
UWB ( Ultra-wideband 超寬帶 ),與藍(lán)牙或 Wi-Fi 本質(zhì)上都是無(wú)線電波,但 UWB 與其它無(wú)線傳輸技術(shù)完全不同,它是一種基于脈沖的無(wú)線載波通信技術(shù),利用納秒級(jí)的非正弦波窄脈沖進(jìn)行數(shù)據(jù)傳輸,其所占的頻譜范圍很寬 ( 3.1 到 10.6 GHz )。相比之下,藍(lán)牙的頻譜范圍只有 2.402 到 2.480 GHz;而 Wi-Fi 只是在 2.4 GHz 和 5 GHz 下分別有一些很窄的頻譜。
與藍(lán)牙和 Wi-Fi 的連續(xù)波信號(hào)不同,UWB 發(fā)射的是脈沖信號(hào),這使它具備了兩個(gè)獨(dú)特的優(yōu)勢(shì):精準(zhǔn)定位和高安全性。UWB 與當(dāng)前的其它通訊技術(shù)相比其抗干擾能力強(qiáng)、低功率、超大帶寬且理論上成本更低。

如今 UWB 技術(shù)在逐漸覆蓋智慧城市與交通、智能建筑與工業(yè)、智慧零售、智能家居與消費(fèi)等領(lǐng)域,相信在不遠(yuǎn)的將來(lái),UWB 技術(shù)將得到更加廣泛的應(yīng)用。
UWB 在汽車領(lǐng)域的應(yīng)用
UWB 憑借其獨(dú)特優(yōu)勢(shì),很早就受到了汽車工程師們的關(guān)注,當(dāng)前越來(lái)越多的汽車廠商開始重視該技術(shù),UWB 在汽車領(lǐng)域的應(yīng)用主要有:
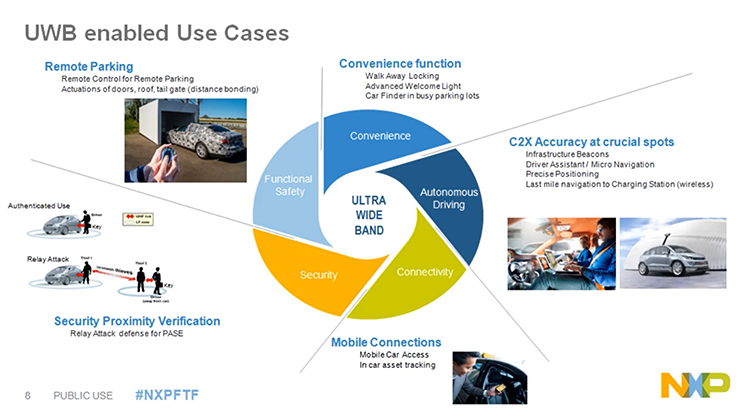
遠(yuǎn)程泊車 ? 遙控停車、開關(guān)車門車窗、踢腳開后備箱。
安全驗(yàn)證 ? 防中繼攻擊的無(wú)鑰匙進(jìn)入。
機(jī)車互聯(lián) ? 手機(jī)與汽車互聯(lián),車內(nèi)資產(chǎn)跟蹤。
車輛聯(lián)網(wǎng) ? 基礎(chǔ)設(shè)施信標(biāo)、駕駛輔助/微導(dǎo)航、精準(zhǔn)定位、自主充電。
便捷功能 ? 離車自鎖、智能迎賓燈、手機(jī)尋車。
當(dāng)前 UWB 在車輛上的應(yīng)用,主要是 PEPS ( Passive Entry & Passive Start 無(wú)鑰匙進(jìn)入無(wú)鑰匙啟動(dòng),詳情參考PEPS的前世今生與未來(lái) ),基于 UWB 精準(zhǔn)定位的智能迎賓模式,以及將 UWB 作為雷達(dá)應(yīng)用的尾門踢腳傳感器。而更有想象空間的其實(shí)是基于 UWB 厘米級(jí)精準(zhǔn)定位特性的 AVP 自主代客泊車。
UWB 技術(shù)為 AVP 賦能
CCC ( Car Connectivity Consortium ) 是一個(gè)全球范圍內(nèi)致力于智能手機(jī)與汽車連接的跨行業(yè)科技聯(lián)盟。
Fira ( Fine ranging consortium ) 是一個(gè)致力于利用 UWB 技術(shù)安全精細(xì)測(cè)距和定位功能提升用戶體驗(yàn)的科技聯(lián)盟。
目前幾乎所有主流的手機(jī)廠和汽車廠都加入了 CCC 聯(lián)盟和 FiRa 聯(lián)盟,而這兩個(gè)聯(lián)盟的主要目的就是讓車和手機(jī)之間能夠通過(guò) UWB 實(shí)現(xiàn)連接。也就是說(shuō),今后這些聯(lián)盟成員的手機(jī)和汽車基本都會(huì)內(nèi)置 UWB 模塊。有了 UWB 模塊,除了讓手機(jī)和車輛可以相互感知位置外,還可以通過(guò)給停車場(chǎng)加裝 UWB 模塊,來(lái)實(shí)現(xiàn)停車場(chǎng)感知車輛位置。這就為 AVP 的實(shí)現(xiàn)打好了基礎(chǔ),這也是為什么目前業(yè)內(nèi)將自動(dòng)泊車場(chǎng)景中的天花板 AVP 公認(rèn)為將最先實(shí)現(xiàn)商業(yè)化應(yīng)用的 SAE Level 4 級(jí)別的自動(dòng)駕駛場(chǎng)景的原因。
AVP 技術(shù)路線主要分為改車派和停車場(chǎng)派,改車派通過(guò)增加車輛傳感器來(lái)提升車輛自身的感知能力;停車場(chǎng)派則是通過(guò)對(duì)停車環(huán)境的改造,來(lái)實(shí)現(xiàn)不同車型的自主泊車。
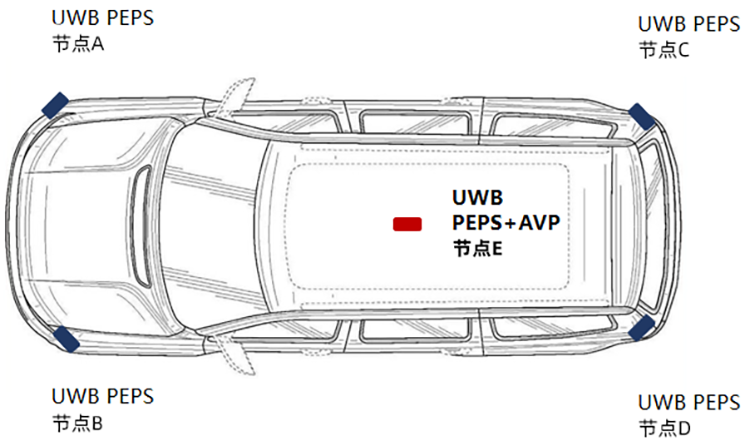
UWB 室內(nèi)實(shí)時(shí)精準(zhǔn)定位技術(shù)在停車場(chǎng)派 AVP 中變得不可或缺,首先車輛使用 UWB 來(lái)實(shí)現(xiàn) PEPS 變成了業(yè)內(nèi)共識(shí),其次使用 UWB 技術(shù)來(lái)實(shí)現(xiàn) AVP 可以復(fù)用車輛 PEPS 的 UWB 模塊,這使得汽車廠無(wú)需增加過(guò)多的額外成本,只需運(yùn)營(yíng)方在停車場(chǎng)基礎(chǔ)設(shè)施中加裝 UWB 模塊就可實(shí)現(xiàn)。汽車廠通常在前大燈和尾燈共放置 4 個(gè) UWB PEPS 模塊,在車頂放置 1 個(gè) UWB 模塊,車頂?shù)?UWB 模塊既可以接收車內(nèi)的 UWB 信號(hào),也可以接收車外的 UWB 信號(hào)。利用車頂?shù)?UWB 模塊接收停車場(chǎng)內(nèi) UWB 基站的高精度定位信號(hào),以此來(lái)增加車輛執(zhí)行 AVP 時(shí)的高精度定位能力。
信馳達(dá)致力于基于 UWB 的 PEPS/AVP 方案提供
作為深圳老牌無(wú)線物聯(lián)網(wǎng)企業(yè),信馳達(dá)致力于為客戶提供基于 UWB 的無(wú)鑰匙進(jìn)入無(wú)鑰匙啟動(dòng)方案,以及基于 UWB 的自主代客泊車方案,歡迎各大車廠咨詢合作。
審核編輯黃宇
-
定位
+關(guān)注
關(guān)注
5文章
1440瀏覽量
35946 -
UWB
+關(guān)注
關(guān)注
32文章
1173瀏覽量
62693 -
PEPS
+關(guān)注
關(guān)注
3文章
26瀏覽量
24529 -
汽車
+關(guān)注
關(guān)注
15文章
3850瀏覽量
39501
發(fā)布評(píng)論請(qǐng)先 登錄
成本下降+算法突破,UWB技術(shù)是否迎來(lái)在割草機(jī)器人領(lǐng)域爆發(fā)的拐點(diǎn)?

AVP32F0049 芯片資料
SMA插座原理圖與封裝:為射頻電路賦能

愛(ài)普生晶振賦能UWB汽車數(shù)字鑰匙,解鎖未來(lái)出行新方式
HarmonyOS 應(yīng)用開發(fā)賦能套件:鴻蒙原生應(yīng)用開發(fā)的 “神助攻”
多領(lǐng)域應(yīng)用落地驅(qū)動(dòng)UWB技術(shù)革新,Qorvo 將推出新一代UWB產(chǎn)品



UWB標(biāo)簽與其他定位技術(shù)的比較
UWB模塊如何助力無(wú)人駕駛技術(shù)
UWB模塊工作原理 UWB模塊應(yīng)用案例






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論