 結構光自標定方法綜述
結構光自標定方法綜述
00 引言
三維重構是計算機視覺核心問題之一,相機-投影儀結構光系統是三維重構體系中一個重要分支,結構光系統標定是其眾多應用的基礎,在某些場景下是其不可或缺的部分。根據標定物不同,標定方法可以粗略地分為基于標定物的傳統標定方法和基于場景約束的自標定方法,傳統標定方法繁雜且無法在線標定,但精度高;自標定方法操作簡單,可以滿足一些特殊應用場景,但模型復雜且精度、魯棒性較差。自標定方法是對傳統標定方法的補充,結構光系統的自標定是在相機自標定基礎上延伸而來,其目的是為了補充傳統標定方法存在的缺陷,也是為了簡化操作流程。
相機標定和自標定綜述文獻較多,結構光系統標定綜述較少。從各類數據庫中檢索到的文獻有劉建偉等人對線結構光系統標定技術的研究,Zhang S 介紹了傳統編碼方法、非傳統編碼方法以及混合編碼方法,給出了部分編碼規則原理,并提供了一些實用技巧。王子為提出了一種基于單應矩陣的攝像機自動標定算法,通過對攝像機內外參數進行標定。范劍英等人。 提出了一種通過一塊圓點平面標定板進行標定,再利用自標定算法標定外參。劉順濤等人研究了基于矩陣變換的攝影測量法、基于幾何關系的三角測量法、多項式擬合法3種標定方法,并將3 種方法的五大具體標定特性進行了對比分析。任瑜、韓正勇等人從其他方面對相機和攝像機的參數標定進行了一些研究。
綜上所述,國內外學者對結構光標定方法進行了一些研究和綜述,但結構光自標定方法綜述在國內外尚未被檢索到。本文針對當前結構光自標定方法進行系統綜述,對不同自標定方法進行分類歸納,就結構光完全自標定重點論述,且對系統重構效果進行比對;提出結構光自標定方法。存在的問題與挑戰;指出結構光自標定的可能解決方案及未來發展方向。
01 結構光自標定理論基礎
相機-投影儀結構光系統自標定是涵蓋相機標定、投影儀標定、相機-投影儀系統標定等科研領域的難點問題,其理論基礎主要包括結構光三維重構系統,相機-投影儀標定以及多視角幾何中的對極幾何等。
1.1 結構光三維重構
相機-投影儀結構光系統一般由數量不等的相機和投影儀組成,投影儀將格雷碼、正弦條紋等主動結構信息投射到被測物體表面,再利用單個或多個相機捕獲帶有結構光冬案的被測物表面,再經過圖像三維解析實現三維重建。結構光三維重構流程包括相機-投影儀標定、編碼、投影編碼圖案到被測物體、相機捕獲帶有編碼圖案的物體表面、解碼、三維重構。結構光三維重構示意如圖1。

圖1 結構光三維重構示意
1.2 相機-投影儀標定
相機-投影儀自標定本質上屬于標定問題,標定參數與傳統相機和投影儀基本一致。在相機-投影結構光系統中,投影儀往往被看作一個逆相機,因此其需要標定的參數與相機基本相同。相機標定可以分為線性標定和非線性標定,非線性標定除需要正常線性標定外,還需要標定相機畸變參數。相機-投影儀標定示意如圖2所示。

圖2 相機投影儀標定示意
1.3 對極幾何
對極幾何是相機-投影儀自標定的基礎。傳統標定方法通過已知標定物上特征點之間的尺寸關系構建約束方程從而求解內外參。自標定過程由不涉及標定物,而是利用場景約束構建約束方程,通過求解約束方程來標定相機和投影儀的內外參。對極幾何示意如圖3所示。
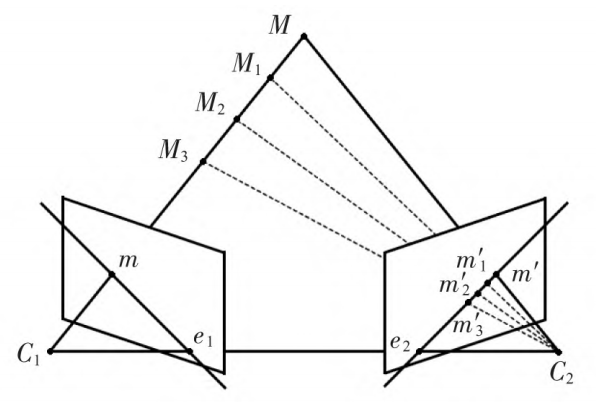
圖3 對極幾何示意
02 結構光自標定方法歸納
按照相機和投影儀數量不同,對結構光自標定方法歸納如表1所示。
表1 結構光自標定方法歸納
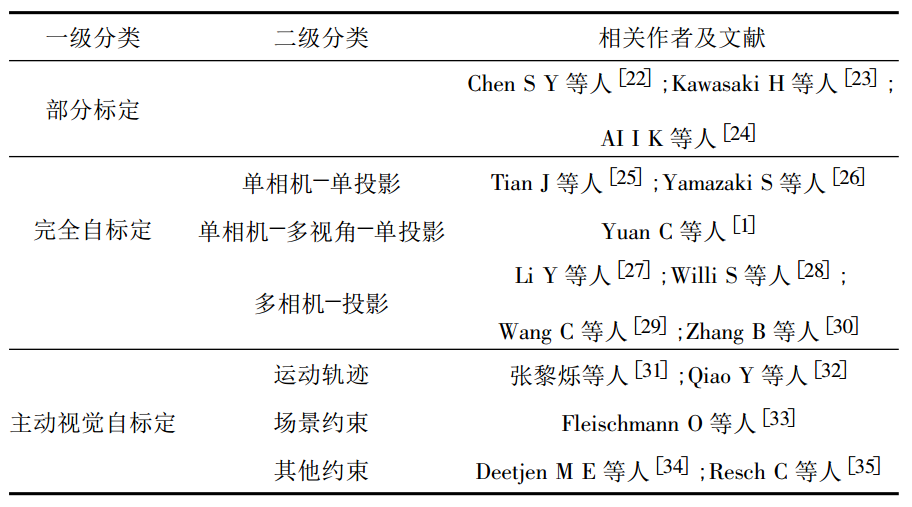
2.1 部分標定
結構光系統部分標定是假設視覺系統中內參或外參部分已知,通過已知參數結合自標定算法求解夫知參數,通常已知相機-投影儀內參,標定外參。Chen S Y等人在假設已知相機和投影儀內參情況下,提出一種自標定算法獲得相機和投影儀的相對位置關系,與之類似的還有文獻等;AI I K等人提出一種新的標定構架,他們搭建的結構光系統由多個相機和一個投影儀組成,但是投影儀的投影過程由人為設置或者控制;范劍英等人針對雙相機-單投影儀的結構光系統進行自標定,內參通過一塊圓點平面標定板進行標定,再利用自標定算法標定外參;除此之外,還有 Garrido-Jurado S等人的方法均與之類似。
2.2 完全自標定
相機-投影儀結構光系統完全自標定是指標定過程不借助外部標定物,僅通過投影儀投射圖像和相機捕獲終像對應間關系,構建約束方程,求解相機和投影儀的內外參數。完全自標定相比其他自標定方法更具吸引力,針對其技術方案與數學模型進行討論是有必要的。完全自標定根據標定對象又可以劃分為單相機-單投影、單相機-多視角-單投影和多相機-投影的完全自標定。
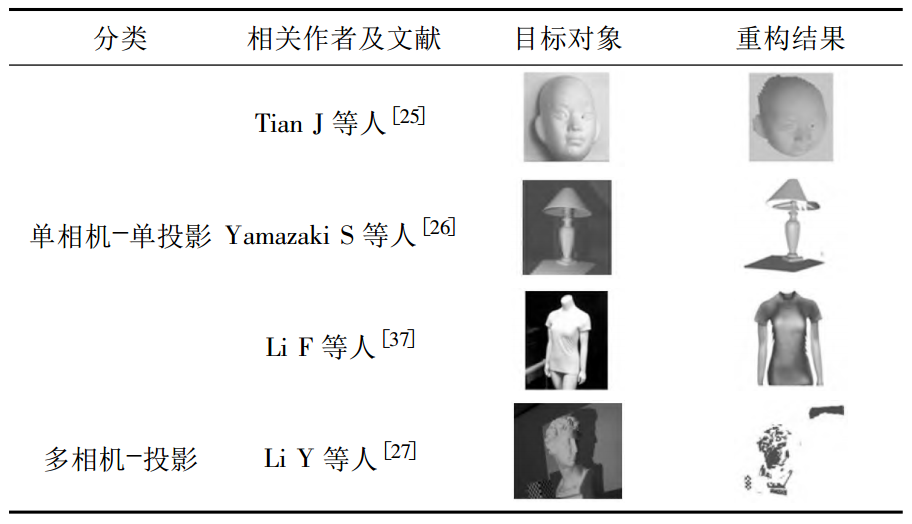
結構光完全自標定是結構光自標定領域一個重要分支,同時也是一個重點研究內容;自標定結果準確與否,除了比對標定參數外,觀察最終重構結果也是一個重要參考指標,重構效果對比如表2所示。
表2 結構光完全自標定重構結果對比
2.3 基于主動視覺自標定
基于主動視覺的結構光自標定方法介于上述兩和自標定方法之間,其本身不需要預先對內外參進行標定,但是需要在自標定過程中給定部分已知信息、空間場景、運動軌跡等。
03 問題與挑戰
相機-投影儀結構光系統自標定方法相比傳統標定方法在某些方面具有顯著優勢,如運動物體在線測量、變焦拍攝等場景,但是,在實際應用的過程中仍然存在一些問題與挑戰。
1)精度與魯棒性方面:與傳統標定方法相比,自標定算法在精度和魯棒性方面存在著明顯不足,在不增加外部標定物的情況下利用完全自標定算法精確獲得相機內參、外參和畸變參數,是一個巨大挑戰。
2)內參假設:當前自標定算法在內參標定時基本都進行了一定假設,例如假設x方向的焦距與y方向的焦距相等,扭曲因子為零等,其原因是當前尚沒有合適的數學模型能夠求解完全形態的相機內參數。
3)畸變參數求解:當前自標定算法主要是對徑向畸變參數進行標定,切向畸變和薄棱鏡畸變在目前結構光自標定中考慮很少,因此,結構光系統的非線性自標定有待提高。
4)多相機-投影的同步完全自標定:隨著硬件與計算力的快速提升,多相機-投影結構光必然成為未來的趨勢,因此,針對多相機-投影自標定算法的研究也將成為一個重點研究方向。然而,到目前為止,針對多相機-投影完全自標定僅有 Willi S等人進行研究,而針對多相機-投影同步完全自標定尚無相關研究成果出現。
04 結束語
本文綜述了近年來結構光自標定算法的研究狀況,發現針對結構光自標定研究較少,完全及同步自標定研究更少,但單相機-單投影的結構光系統標定的研究相對成熟,多相機-投影儀的同步完全自標定尚無有效解決方案。此外,針對相機-投影儀完全自標定技術方案從底層數學模型進行闡述,面對當前結構光自標定算法中存在的問題,給出一些可能的解決方案。
未來,將設計目標函數時以約束項的形式考慮之前通過假設舍去的內參和畸變參數,引入深度學習對約束項參數進行調整和優化,通過迭代進行求解;針對多相機-投影結構光系統同步完全自標定,考慮分解為多相機系統自標定和單相機-單投影同步完全自標定兩個過程,分別設計求解承數,最后將兩個目標承數整合為一個總的目標雨數,通過迭代求解達到全局最優,從而實現多相機-投影結構光系統的同步完全自標定。
審核編輯 :李倩
-
投影儀
+關注
關注
4文章
890瀏覽量
43963 -
數據庫
+關注
關注
7文章
3905瀏覽量
65873 -
結構光
+關注
關注
0文章
74瀏覽量
13455
原文標題:結構光自標定方法綜述
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
基于模型的電機標定方法
自適應卡爾曼濾波在平臺射前自標定中的應用
基于LABVIEW的圖像測量技術標定方法
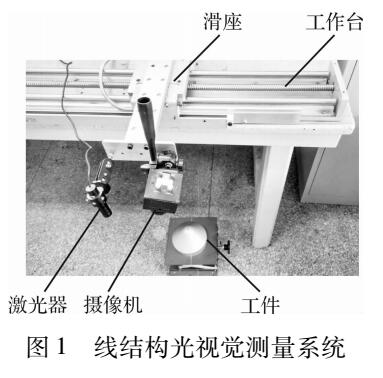
如何使用線紋尺的線結構光視覺傳感器進行視覺檢測標定的方法說明

3D結構光的優點及參數如何進行標定
張氏標定法的原理和實現
什么是相機標定 常用相機標定的方法






 工商網監
工商網監
評論