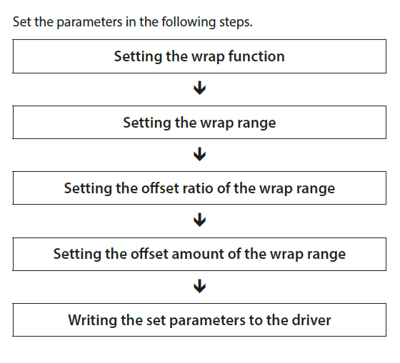
") Wrap 函數(shù):絕對坐標中旋轉分度的簡化位置控制
Wrap 函數(shù):絕對坐標中旋轉分度的簡化位置控制

隨著最近的趨勢集中在提高工程效率,許多產品已經(jīng)開發(fā)出來專門幫助縮短機器自動化的設計周期。提高效率的一部分是使產品更易于使用,因此可以將額外的時間和資源花在其他地方。這篇文章描述了一個產品功能,可以降低索引表應用程序的管理復雜性。
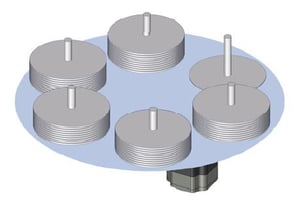 |
應用示例:旋轉分度臺,沿同一方向重復旋轉固定距離。分度臺下方安裝了電動旋轉執(zhí)行器。 下面的產品視頻展示了注射器點膠應用的類似應用示例;還帶有旋轉執(zhí)行器。 |
| 對于沿同一方向重復旋轉固定距離的分度臺,由于內部位置計數(shù)器值不斷增加,因此位置管理會很困難。在操作員了解桌子實際面向的位置之前,需要進行一些數(shù)學計算以將步數(shù)轉換為度數(shù)。 |
例如,假設我們使用基本步進分辨率為每轉 200 步或每步1.8° 的電機一次定位 90 度。位置計數(shù)器值將如下所示:
| 腳步 | 0 | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 |
| 學位 | 0° | 90° | 180° | 270° | 360° | 450° | 540° | 630° | 720° | 810° | 900° |
在轉臺上,相同的分度位置在360度后重復出現(xiàn),需要計算360度內的實際位置坐標。
這是計算實際位置坐標的簡單公式。
實際位置 = 當前位置(以度為單位)-(360 x 行駛的轉數(shù))
對于 900°,旋轉臺已旋轉超過 2 圈,因此公式為:
實際位置 = 900° - (360° x 2) = 180°(從起始位置)
有沒有更簡單的方法來做到這一點?
| 挑戰(zhàn) |
| 通過轉換為絕對坐標而不是步驟更好地管理 360° 坐標 |
對于分度臺的定位管理,如果位置計數(shù)值可以以度為單位設置,并且超過360°后清零位置計數(shù)器,則更容易監(jiān)控臺面位置。對于上面的示例,位置值可以從步數(shù)轉換為度數(shù),這讓生活變得更輕松了。其他功能,例如Wrap Proximity Positioning和Wrap Absolute Positioning,可用于使位置控制和管理更加容易。
| 解決方案 |
| 在適當?shù)臅r候使用Wrap Function來重置位置計數(shù)器 |
當電機輸出軸超過設定值時,Wrap 功能會自動將位置計數(shù)器值重置為 0。例如,當“Wrap Setting Range”設置為“1 轉”時,當電機軸從原點位置超過 360°時,位置計數(shù)器值自動重置為 0。齒輪比也可以添加到額外的調整中。
在這里,我們向您展示了專用MEXE02 支持軟件的屏幕截圖,其中包含 Wrap 參數(shù)設置。
左側菜單:
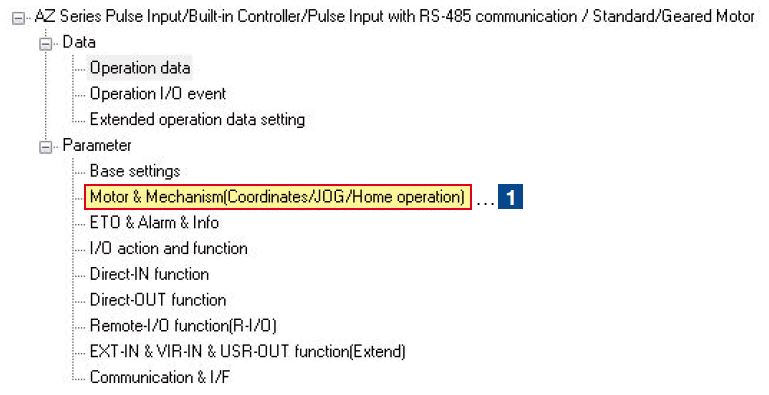
中心窗口:
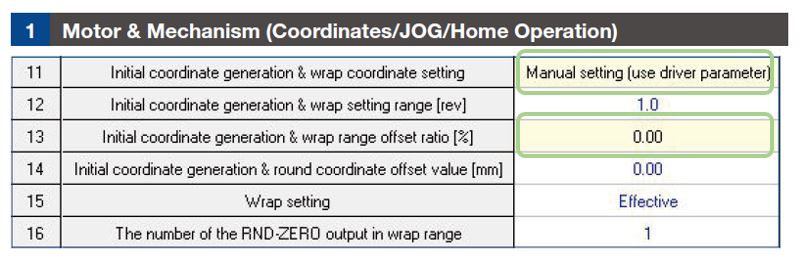
圈出的參數(shù)已從其默認值更改以實現(xiàn)此目的。
| 初始坐標生成和環(huán)繞坐標設置 |
要使用環(huán)繞功能,請選擇手動 設置。 設置范圍:ABZO傳感器或手動 |
| 初始坐標生成和環(huán)繞設置范圍 (rev) |
設置環(huán)繞范圍。 電機旋轉了 此處設定的次數(shù)后,指令位置返回 0。 設置范圍:5 至 655,360(1=0.1 轉) |
| 初始坐標生成和環(huán)繞范圍偏移率 (%) |
設置環(huán)繞范圍的偏移率。 設置范圍:0 到 10,000 (1=0.01%) |
| 環(huán)繞設置 | 啟用或禁用 |
| 環(huán)繞范圍內 RND-ZERO 輸出的編號 |
設置在環(huán)繞范圍內打開 RND-ZERO 輸出的次數(shù) 。 設置范圍:1至536,870,911格 |
這是一個視頻,向您展示如何使用MEXE02 支持軟件為 Oriental Motor 的旋轉執(zhí)行器設置 Wrap Function 參數(shù)。
獎勵:通過此視頻教程了解您可以執(zhí)行的各種類型的環(huán)繞定位操作。
有關環(huán)繞功能的更多信息,請參閱* * DG II 系列是 AZ 系列的中空旋轉執(zhí)行器版本的第 40 頁。
|
產品亮點:DG II 系列旋轉執(zhí)行器 低調 提供交流和直流版本 60/85/130/200 毫米框架尺寸 內置絕對位置傳感器 允許扭矩高達 50 Nm (440 lb-in) 力矩負載高達 100 Nm (880 lb-in) 推力負載高達 900 磅(408 千克) |
 |
 |
 |
審核編輯黃宇
-
電機
+關注
關注
143文章
9275瀏覽量
148904 -
定位
+關注
關注
5文章
1429瀏覽量
35907
發(fā)布評論請先 登錄
磁旋轉編碼器在永磁同步電機位置測量中的應用(可下載)
創(chuàng)新伺服電機使用的多圈絕對式旋轉編碼器
三坐標測量機的機器坐標系和原點介紹

倍加福PXV絕對位置定位系統(tǒng)如何工作
絕對式編碼器在伺服電機控制中的應用與優(yōu)勢分析

使用旋轉電感式位置傳感器的三相BLDC電機的磁場定向控制(FOC)

拉線式絕對值編碼器:精準測量與位置反饋的可靠解決方案

光路元件的位置和方向
熱電偶分度號
AksIM-2離軸旋轉絕對編碼器數(shù)據(jù)表
一種將NeRFs應用于視覺定位任務的新方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論