") 精密運動控制平臺
精密運動控制平臺

一、產(chǎn)品概述
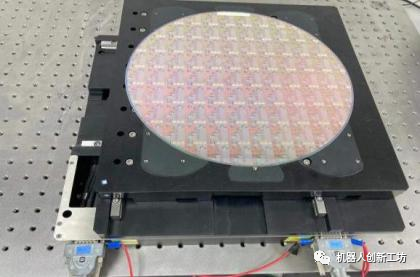
精密運動控制平臺以典型運動機構(gòu)做為控制對像,應(yīng)用自有模型化控制算法開發(fā)環(huán)境,搭配多路多信號IO板卡做為電量采集手段,高性能功放實現(xiàn)功率驅(qū)動,為高精密運動控制系統(tǒng)開發(fā)人員、研學人員,提供一套完整的算法驗證平臺。在該本臺上可以跳過基礎(chǔ)編碼器采集、驅(qū)動軟件開發(fā)等工作,直接驗證高級控制算法。由于軟變量全開放性,硬件系統(tǒng)自研,所以可以為算法開發(fā)人員提供有力的支撐。
二、產(chǎn)品特色
1、開發(fā)環(huán)境友好,基于MATLAB/Simulink開發(fā)調(diào)制控制算法;2、融合軌跡生成與插補模塊,測試、加入迭代學習和軌跡輸入整形算法與光刻HIL模型算法融合,實現(xiàn)同平臺的模型仿真與實物控制;3、具有豐富的接口板卡資源,可以方便的與激光干涉儀、跟蹤儀、渦流傳感器等反饋設(shè)備連接;
4、具有EtherCAT、CANOPEN、ProfiNet等工業(yè)現(xiàn)場總線的擴展能力;
5、被控對像可擴展性強,可以是伺服電機、多自由度高精度XYR運動平臺、尺蠖式壓電致動器等;
三、系統(tǒng)性能參數(shù)
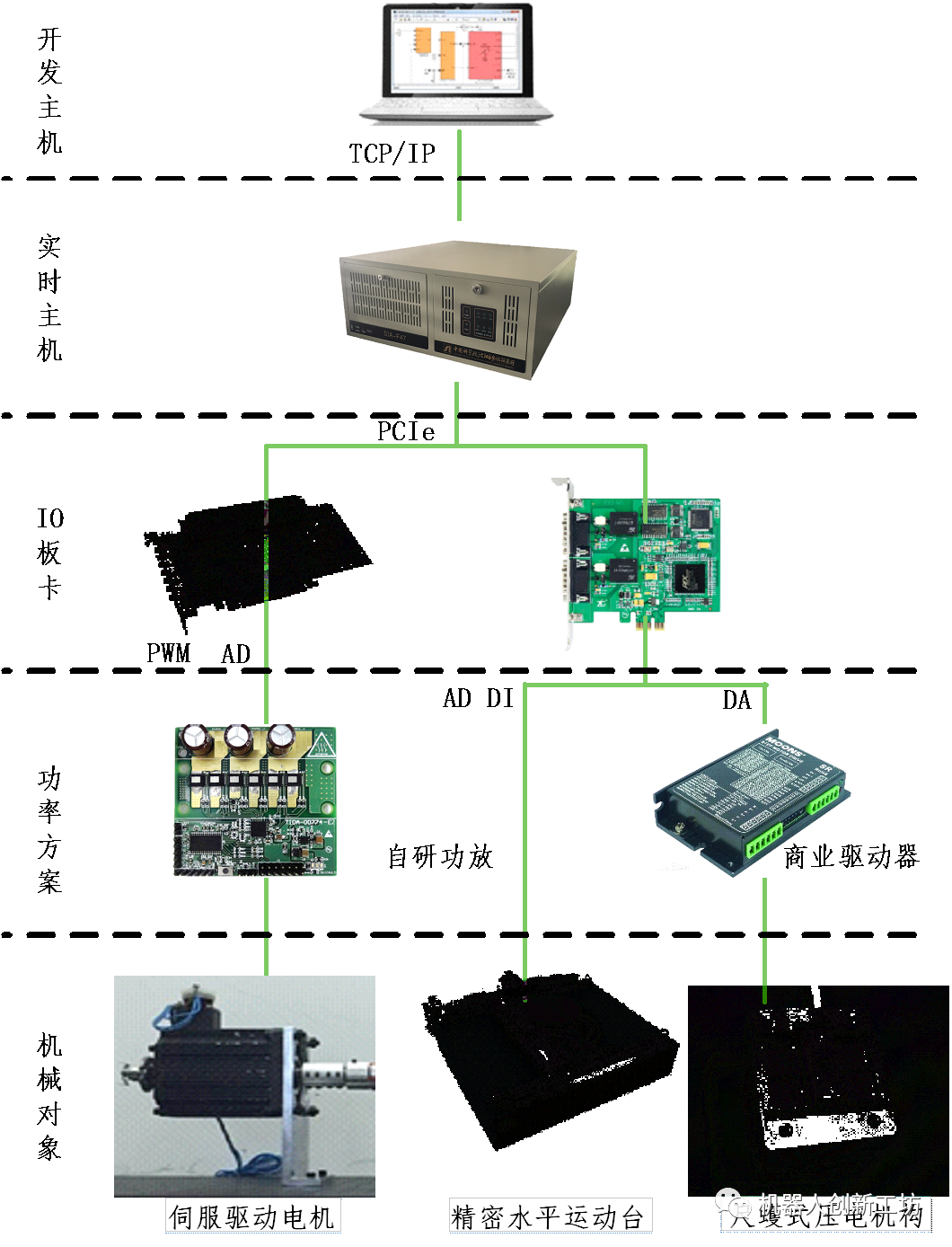
精密運動控制平臺由上位開發(fā)機、實時控制主機、FPGA IO板卡、自研功率放大模塊、商業(yè)驅(qū)動器和精密平面運動平臺組成。
1、FGPA IO板卡:FMCIO采集卡是集AD、DA、PWM控制、差分輸入輸出等多功能為一體的板卡,針對每個功能,采集卡設(shè)計了多通道同步采集機制。具體接口列表如圖:
|
支持接口 |
描述 |
|
AD接口 |
16路AD接口,分辨率16bit,200Ksps同步采樣,輸入范圍±10V |
|
DA接口 |
2路DA接口,分辨率16bit,輸出范圍±10V |
|
差分信號輸入接口 |
12路,光耦隔離保護,可用作增量編碼器接口 |
|
差分信號輸入輸出接口 |
6路,可編程方向,可用作絕對值編碼器數(shù)據(jù)接口,支持SSI、BISS、Endat和多摩川編碼器。 |
|
差分信號輸出接口 |
6路,可用作絕對值編碼器時鐘接口,支持SSI、BISS、Endat等編碼器。 |
|
PWM驅(qū)動輸出 |
6路PWM輸出(A/B),具有軟硬件保護功能 |
2、軟件系統(tǒng):
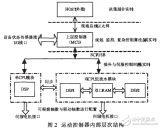
系統(tǒng)主架構(gòu)圖如下圖所示:
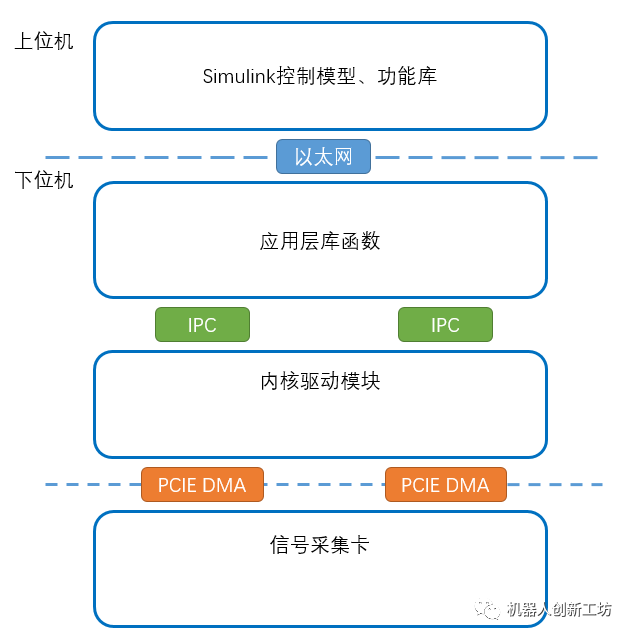
主機系統(tǒng)架構(gòu)圖
如上圖所示,主機系統(tǒng)架構(gòu)主要包括信號采集板卡,下位機內(nèi)部包含內(nèi)核驅(qū)動模塊和應(yīng)用層庫函數(shù),上位機中包括Matlab軟件本身及封裝好的Simulink功能模塊庫。信號采集卡通過PCIE通信協(xié)議與內(nèi)核驅(qū)動模塊通信,內(nèi)核驅(qū)動模塊通過IPC通信與應(yīng)用層程序通信。本設(shè)計中,內(nèi)核驅(qū)動模塊與應(yīng)用層通信的功能以應(yīng)用層函數(shù)庫的形式被封裝,該函數(shù)庫的調(diào)用又被進一步封裝到Simulink功能模塊庫中。
下位機啟動時會自動掛載內(nèi)核驅(qū)動模塊等待調(diào)用。在Simulink模型編譯時,會包含該功能模塊庫功能一起生成下位機應(yīng)用層可執(zhí)行文件。Simulink模型運行時會自動運行該可執(zhí)行文件,該可執(zhí)行文件會啟動信號采集卡響應(yīng)信號采集功能。
算法開發(fā)方式:
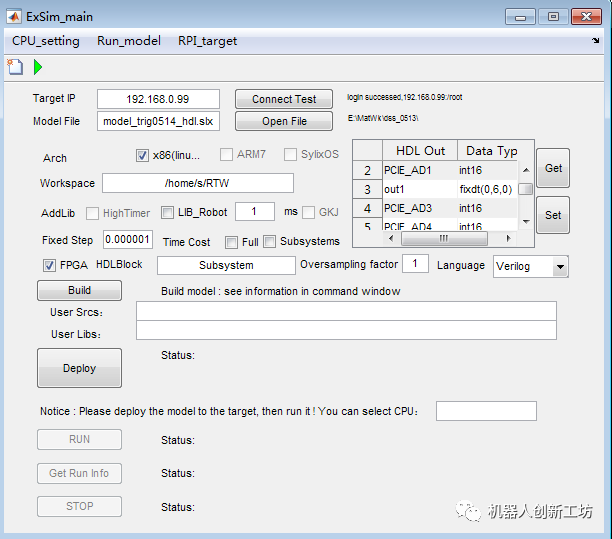
基于自研的功率級電機控制策略快速驗證解決方案,用戶在可以在Simulink界面環(huán)境下調(diào)用電力電子專用模型庫和軟件開發(fā)工具包(SDK)搭建實際硬件拓撲結(jié)構(gòu),并快速建立控制算法模型,對控制器的輸入輸出進行仿真,控制實際功率器件驅(qū)動實際電機,快速驗證控制方案的可行性。應(yīng)用范圍靈活地涵蓋各功率等級的多類電機控制器研發(fā)測試。
l支持x86目標機部署
l支持可選異構(gòu)部署
l支持輸出數(shù)據(jù)類型重配置
l開發(fā)者源文件鏈接
lFPGA參數(shù)設(shè)置功能
lHIL自定義Simulink庫
l開發(fā)者自定義功能
3、精密平面運動平臺
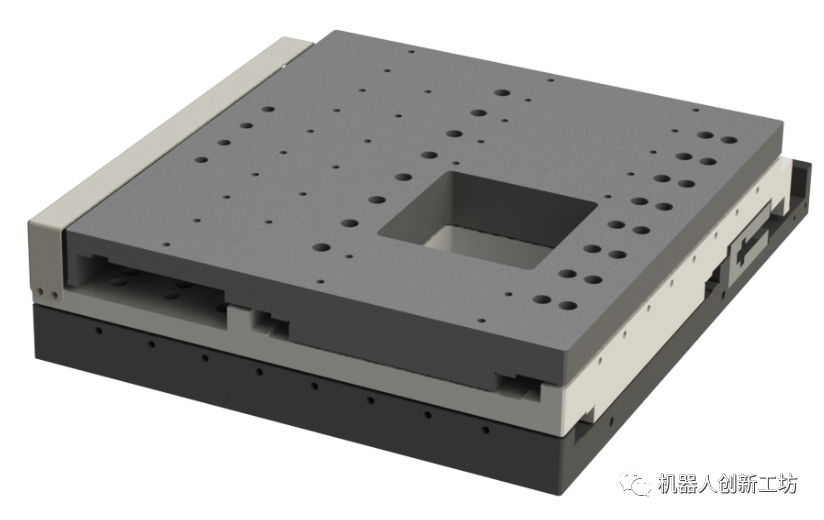
精密平面運動平臺超薄型設(shè)計,集成了X軸和Y軸,擁有優(yōu)異的定位精度、平面度、直線度、剛性和重復(fù)性精度。該臺子可定制,包括行程、反饋精度、驅(qū)動電機等參數(shù),都可根據(jù)用戶需求進行調(diào)整。
l集成XY平臺,正交性設(shè)計
l全局平面度、直線度達微米級
l超薄型設(shè)計
l高效率,無齒槽力電機設(shè)計
l模擬光柵,最高可實現(xiàn)1.2納米分辨率
|
精密平面運動平臺XY臺-XY100 |
||||
|
運動軸 |
X |
Y |
Unit |
Remark |
|
行程 |
200 |
200 |
mm |
|
|
速度 |
300 |
300 |
mm/s |
|
|
加速度 |
3 |
3 |
g |
Onlyloadofaxis |
|
最小步距 |
1 |
1 |
μm |
|
|
定位性能 |
0.03 |
0.03 |
μm |
|
|
雙向重復(fù)定位精度 |
0.25 |
0.25 |
μm |
|
|
平面度 |
2.0 |
2.0 |
μm |
|
|
直線度 |
2.0 |
2.0 |
μm |
|
|
俯仰/pitch |
40 |
40 |
μrad |
|
|
偏擺/yaw |
40 |
40 |
μrad |
|
|
橫滾/roll |
40 |
40 |
μrad |
|
|
正交性/Orthogonality |
50.00 |
50.00 |
μrad |
|
|
傳感器 |
||||
|
類型 |
增量式光柵尺 |
Optical,directmeasuring |
||
|
分辨率 |
20 |
20 |
nm |
typ.(最小0.001.2nm) |
|
軸的驅(qū)動負載 |
3.3 |
6.2 |
Kg |
|
|
平臺質(zhì)量 |
11 |
Kg |
||
|
機械尺寸 |
285X241X64 |
mm*mm*mm |
||
|
驅(qū)動類型 |
||||
|
電機類型 |
Tecnotion無鐵芯電機 |
|||
|
峰值力 |
100 |
200 |
N |
max. |
|
連續(xù)力 |
22.29 |
44.58 |
N |
|
|
電機/傳感器 |
2×Sub-D,15-pin |
|||
四、實驗結(jié)果

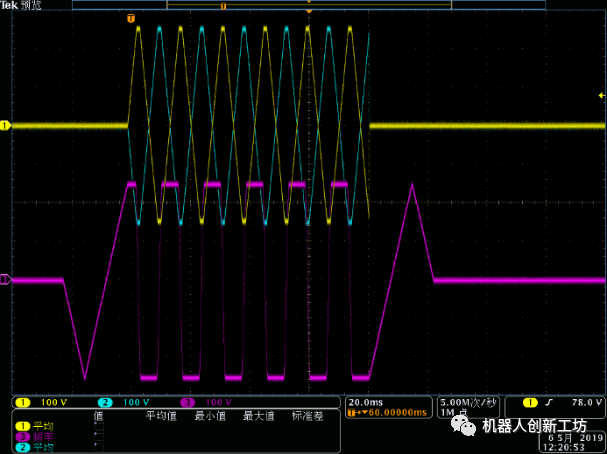
控制器及X-Y200運動臺 尺蠖式驅(qū)動模型驅(qū)動電壓波形
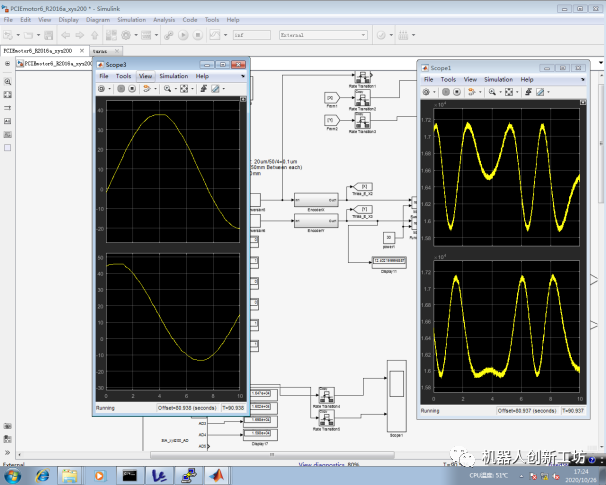
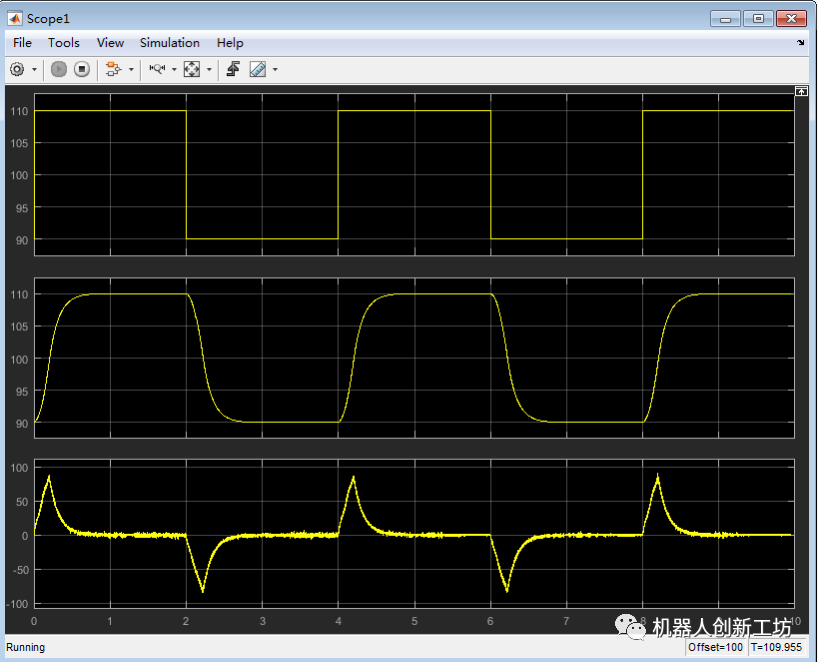
XY平臺雙軸位置軌跡及單電機電流波形 伺服電機位置跟蹤及速度波形
審核編輯 :李倩
-
模塊
+關(guān)注
關(guān)注
7文章
2786瀏覽量
50060 -
運動控制
+關(guān)注
關(guān)注
4文章
647瀏覽量
33477 -
FGPA
+關(guān)注
關(guān)注
1文章
25瀏覽量
16249
原文標題:精密運動控制平臺
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
多軸伺服控制同步精密運動
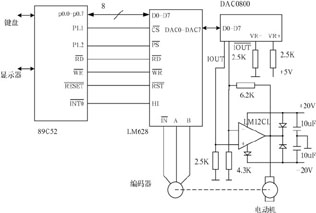
精密運動控制器LM628的應(yīng)用設(shè)計
精密機械運動控制系統(tǒng)


三分鐘了解超精密運動控制技術(shù)

如何在工業(yè)驅(qū)動器中實現(xiàn)精密的運動控制
基于MCU+DSP的運動控制硬件平臺設(shè)計
艾羅德克精密運控平臺再升級 凸顯全新應(yīng)用價值
在工業(yè)驅(qū)動器中實現(xiàn)精密的運動控制





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論