") FMCW DDMA-MIMO 雷達(dá)波形MATLAB仿真
FMCW DDMA-MIMO 雷達(dá)波形MATLAB仿真

本文首發(fā)于公眾號(hào)【調(diào)皮連續(xù)波】,其他平臺(tái)為自動(dòng)同步,內(nèi)容若不全或亂碼,請前往公眾號(hào)閱讀。保持關(guān)注調(diào)皮哥,和1.5W雷達(dá)er一起學(xué)習(xí)雷達(dá)技術(shù)!
【正文】
編輯|雷達(dá)小助理 審核|調(diào)皮哥
1、DDMA-MIMO波形原理
在通信系統(tǒng)中,復(fù)用、分集、多址三個(gè)概念本質(zhì)上是不同的,但是在雷達(dá)系統(tǒng)中,我感覺論文里大家都在混用,感覺這三個(gè)概念沒有什么區(qū)別。比如TDM-MIMO,一些論文說是時(shí)分復(fù)用,一些論文又說時(shí)分多址,真會(huì)把人搞昏。
DDMA被稱多普勒分多址,或者多普勒多通道分離、多普勒分集發(fā)射。DDMA波形通過DDMA的多天線同時(shí)發(fā)射,結(jié)合雷達(dá)上新的相關(guān)檢測信號(hào)鏈,能夠比常用的 TDMA(時(shí)間分集發(fā)射)波形獲得更高的 SNR(信噪比)和更遠(yuǎn)的探測距離,分集發(fā)射增益如下公式所示。同時(shí)采用基于 Empty-band 的波形設(shè)計(jì)實(shí)現(xiàn)DDMA解調(diào),從而全面提升雷達(dá)的性能。
其中,Nt是發(fā)射天線個(gè)數(shù)。
DDMA波形原理本文不再論述,讀者可直接閱讀相關(guān)論文及其引用文獻(xiàn):
Fast-Chirp FDMA MIMO Radar System Using Range-Division Multiple-Access and Doppler-Division Multiple-Access。
DDM-MIMO雷達(dá)技術(shù)存在一些缺點(diǎn),限制了其在汽車?yán)走_(dá)中的應(yīng)用。在多目標(biāo)場景中,每個(gè)目標(biāo)將在距離多普勒譜中生成一個(gè)真實(shí)位置,但在同一距離單元之間伴隨著多根發(fā)射天線的干擾,當(dāng)有多個(gè)目標(biāo)在相同距離但速度不同時(shí)出現(xiàn)問題,真正的目標(biāo)和干擾將被混淆。
仿真環(huán)境:MATLAB2022a
操作系統(tǒng): Windos10
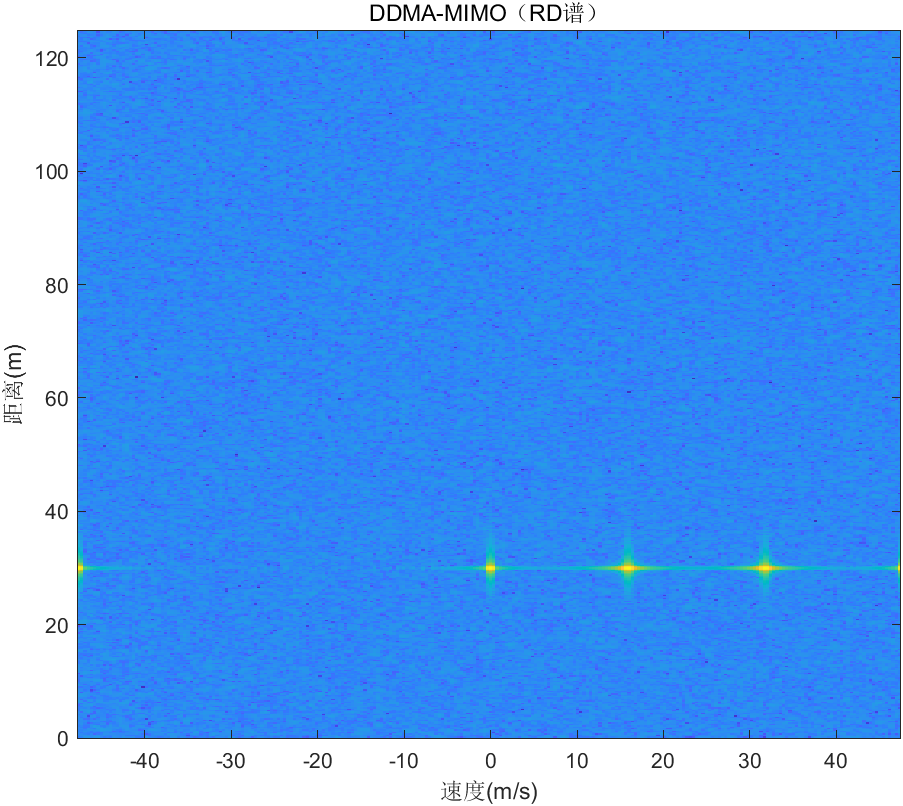
4T4R,2個(gè)空帶,R=30m,V=0m/s,snr=20dB的仿真距離速度譜效果:
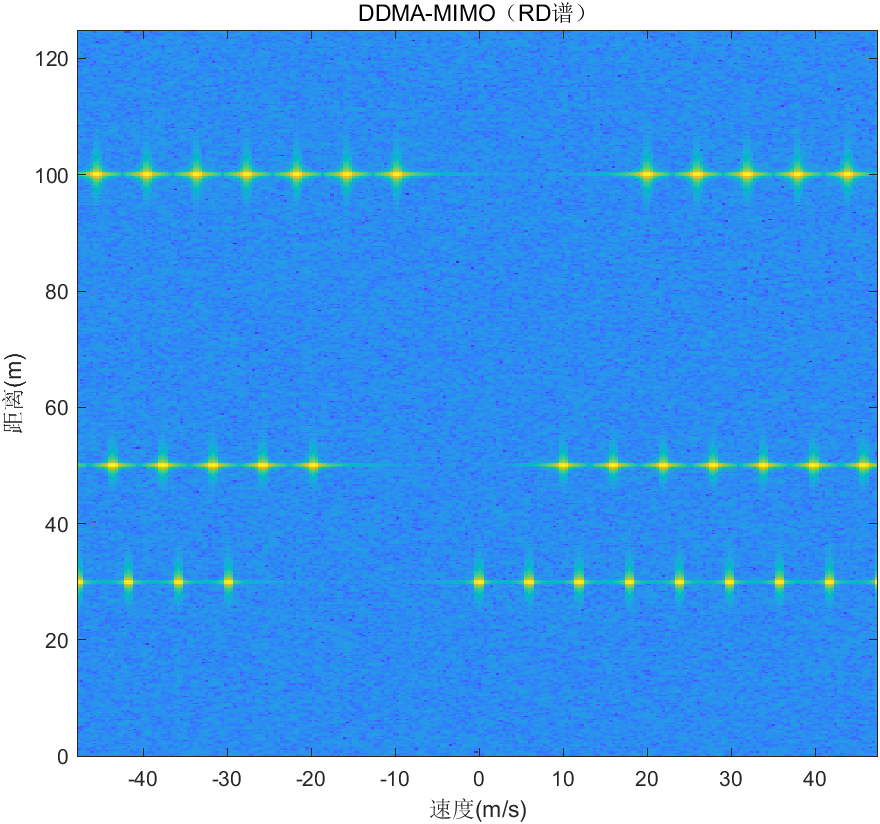
4T4R,2個(gè)空帶R1=30m,V1=0m/s,R2=50m,V2=10m/s,R3=100m,V3=20m/s,SNR=20dB的仿真距離速度譜效果:

12T16R,4個(gè)空帶R1=30m,V1=0m/s,R2=50m,V2=10m/s,R3=100m,V3=20m/s,SNR=20dB的仿真距離速度譜效果:
3、關(guān)鍵代碼解析
主程序RSP.m,包含了雷達(dá)參數(shù)、目標(biāo)參數(shù)、DDMA-MIMO信號(hào)建模、距離維FFT和速度維FFT。
%% 公眾號(hào) :調(diào)皮連續(xù)波%% 時(shí)間:2023年05月11日clc;clear all;close all;%% 雷達(dá)參數(shù)設(shè)置parameter = generateParameter();%% 雷達(dá)回波信號(hào)建模rawData = generateSignal(parameter);firstChirp = rawData(1,:,1);%% 雷達(dá)信號(hào)處理rangeRes = parameter.c / (2 * parameter.BandwidthValid); %距離分辨率 有效帶寬rangeIndex = (0:parameter.rangeBin-1) * rangeRes;speedRes = parameter.lambda / (2 * parameter.dopplerBin * parameter.Tr);dopplerIndex = (-parameter.dopplerBin/2parameter.dopplerBin/2 - 1) * speedRes;angleRes = parameter.lambda / (parameter.virtualAntenna * parameter.dx) * 180 / pi;angleIndex = (-parameter.virtualAntenna/2parameter.virtualAntenna/2 - 1) * angleRes;%%1D FFTfft1dData = fft(firstChirp);figure(3);plot(db(abs(fft1dData)./max(abs(fft1dData))));xlabel('距離(m)'); ylabel('幅值(dB)');title('距離維FFT');%% 2D FFT%% 距離-多普勒譜channelNum = size(rawData,1);rangebinNum = size(rawData,2);dopplerbinNum = size(rawData,3);fft2dDataPower= zeros(size(rawData));fft2dDataDB = zeros(size(rawData));fftRADataPower= zeros(size(rawData));for chanId = 1channelNumfft2dDataPower(chanId,:,:) = RDfftMatrix(rawData(chanId,:,:));endfigure(4);imagesc(dopplerIndex',rangeIndex,db(abs(squeeze(fft2dDataPower(2,:,:)))));axis xyview(2);xlabel('速度(m/s)'); ylabel('距離(m)'); zlabel('幅值');title('DDMA-MIMO(RD譜)');
DDMA信號(hào)建模,首先按照不同Chirp和發(fā)射通道生成相位值,然后讓所有發(fā)射通道的信號(hào)疊加,最后根據(jù)目標(biāo)參數(shù)獲得回波信號(hào),然后混頻得到中頻信號(hào),疊加噪聲。
空帶Empty_Band設(shè)置如下:
=4;%空帶數(shù)目
相位和發(fā)射信號(hào)模型如下:
phi_offset = (chirpId-1)*(txId-1)*2*pi/(txNum+Empty_band);St1 = 10*exp(1j*2*pi*(centerFreq*(t+(chirpId-1)*Tr)+slope/2*t.^2)+1j*phi_offset); %發(fā)射信號(hào)
好了,總的來說DDMA-MIMO仿真并不是那么難,感興趣的朋友可以試試,本文所涉及到的代碼已經(jīng)放入會(huì)員庫,年度會(huì)員可以直接下載,非會(huì)員請私信。
| 序號(hào) | 類別 | 內(nèi)容 | 文件路徑 |
|---|---|---|---|
| 1 | 雷達(dá)代碼 | 本文內(nèi)容 | 根目錄雷達(dá)代碼庫 |

【點(diǎn)擊以下鏈接可直達(dá)各個(gè)業(yè)務(wù)模塊】
| 加入年度會(huì)員(專屬VIP群) | |
【本期結(jié)束】
本文是空閑時(shí)個(gè)人的心得體會(huì),僅供參考。目前我還有很多內(nèi)容需要學(xué)習(xí),如果還有沒有說到或者不全面的地方,還請指正,感謝大家。
喜歡本文,可以轉(zhuǎn)發(fā)朋友圈。歡迎關(guān)注【調(diào)皮連續(xù)波】和備用號(hào)【跳頻連續(xù)波】。
審核編輯黃宇
-
matlab
+關(guān)注
關(guān)注
189文章
2999瀏覽量
233643 -
仿真
+關(guān)注
關(guān)注
52文章
4254瀏覽量
135540 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
3102瀏覽量
119780
發(fā)布評(píng)論請先 登錄
FMCW激光雷達(dá),加速落地工業(yè)場景
FMCW激光雷達(dá),工業(yè)應(yīng)用新進(jìn)展
如何用FOC電機(jī)控制MATLAB仿真!
如何用Simulink仿真BLDC反電動(dòng)勢波形(可下載)
Matlab/Simulink/Stateflow建模開發(fā)及仿真測試
基于AWR2944的汽車雷達(dá)DDMA波形的原理和實(shí)現(xiàn)

引爆行業(yè)熱潮,飛芯電子相干4D FMCW無人機(jī)偵測激光雷達(dá)震撼發(fā)布!
AWR1642單芯片77GHz和79GHz FMCW雷達(dá)傳感器數(shù)據(jù)表
AWR1443單芯片77GHz和79GHz FMCW雷達(dá)傳感器數(shù)據(jù)表
AWR1843 單芯片 77GHz 至 79GHz FMCW 雷達(dá)傳感器數(shù)據(jù)表
AWR2943/44 單芯片 76GHz 和 81GHz FMCW 雷達(dá)傳感器數(shù)據(jù)表
AWR2544單芯片76GHz81GHz FMCW雷達(dá)SoC數(shù)據(jù)表





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論