") 編碼器與正交譯碼器
編碼器與正交譯碼器

我想提出一個關(guān)于PicoScope7新的譯碼器功能討論。它已經(jīng)推出一段時間,但你可能不知道這在汽車領(lǐng)域是扮演相當(dāng)重要的角色。
正交譯碼器被用在轉(zhuǎn)子位置傳感器來轉(zhuǎn)換關(guān)于旋轉(zhuǎn)軸角度及方向的信息。
舉例來說,它在電機上采用一對二進制的信號型式。
這種傳感器已經(jīng)在電機使用一段時間了且我們可以譯碼這些信號來判斷當(dāng)電機轉(zhuǎn)動時,ECU正在讀取什么數(shù)據(jù)。以下圖片是一臺奔馳B-Class裝載特斯拉電機之?dāng)?shù)據(jù)。這個傳感器有兩個方波輸出。我也將電池的電流信息加進來讓我更清楚電機轉(zhuǎn)動的時間。
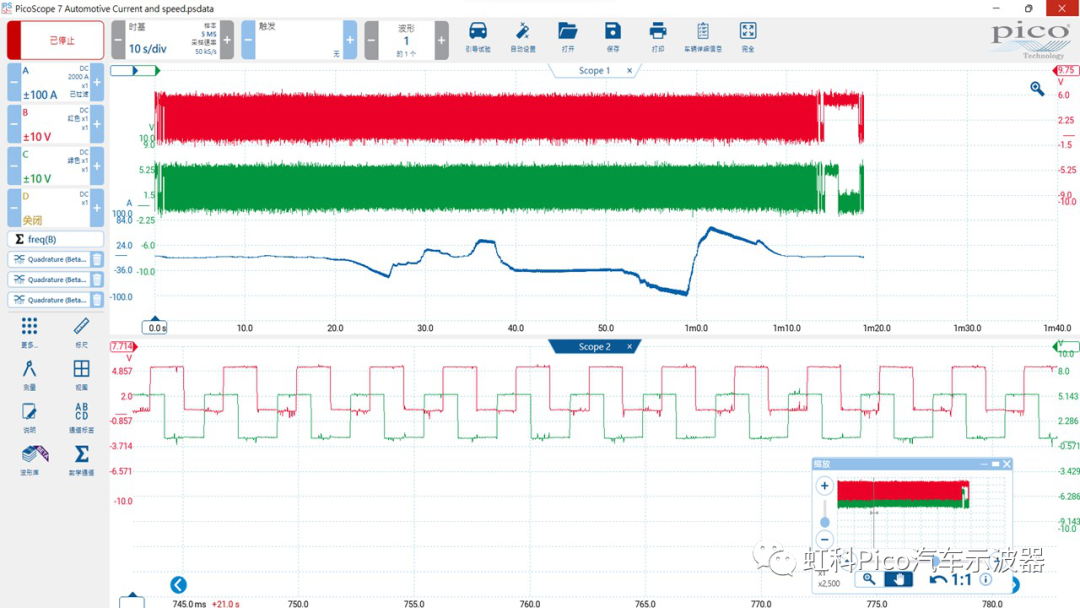
編碼器會基于這兩個信號的交替相應(yīng)來判斷軸的速度與旋轉(zhuǎn)方向。我們在設(shè)定這個正交譯碼器時,有些規(guī)則需要先了解:哪個信號是領(lǐng)先信號?轉(zhuǎn)子旋轉(zhuǎn)一圈的脈沖數(shù)是多少?
然而我很快發(fā)現(xiàn)這個信息并不容易取得。但這不應(yīng)該阻止我們用此譯碼器。
將譯碼器加入你的捕獲信息,點擊 更多>串型譯碼并選擇正交(Quadrature)


在配置設(shè)定里,你需要設(shè)定譯碼器要在哪些通道找到這些適用數(shù)據(jù)。

- 在舉例中,相關(guān)信息位于通道B與C。
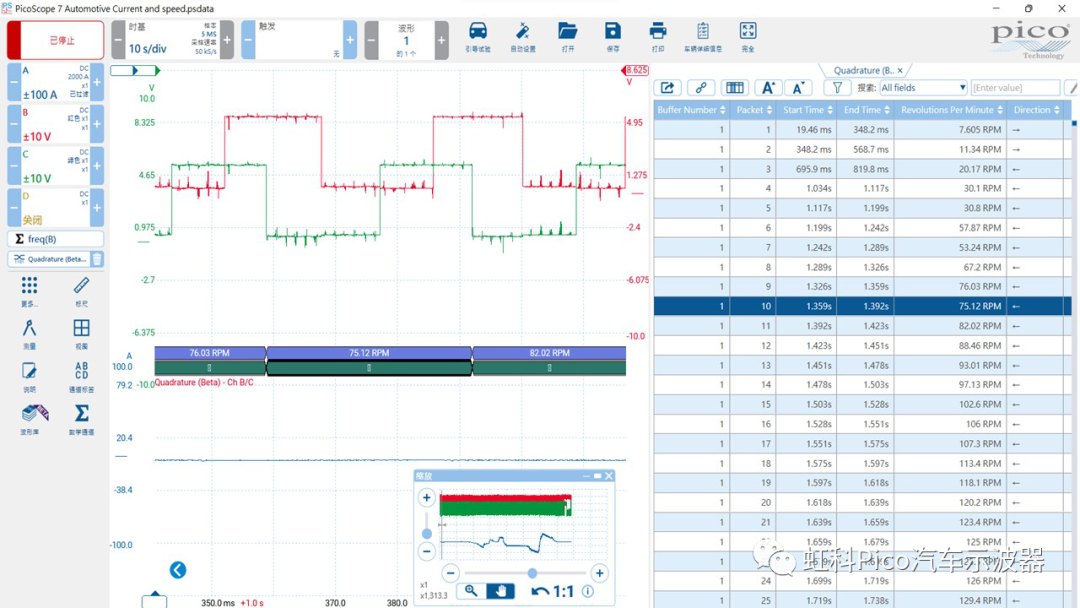
- 這個信號的幅值約于0-5V。選擇3V的閥值讓我們較靠近信號的中間值,讓正交點更清晰。因為正交點清晰所以滯后量在此并不是很重要,所以采用軟件自動設(shè)定的數(shù)值即可。第二個信號也需要添加進去并采用類似的設(shè)定!
- 顯示設(shè)置(Display settings)有幾個選項:速度、位移量及時脈轉(zhuǎn)換。對于此情況應(yīng)用,我們通常采用速度。
- 旋轉(zhuǎn)每圈的脈沖數(shù)(Pulses per revolution)默認(rèn)值為24。如果你可以找到這個信息則可以修改并采用,否則就保持預(yù)設(shè)值。這也表示你從譯碼器捕獲到的速度值并不一定代表編碼器監(jiān)控軸的速度值。
- A領(lǐng)先B(A leads B is):此為設(shè)定你的兩個信號哪一個為領(lǐng)先信號。你會有關(guān)于順時鐘與逆時鐘的選項。這部分可能也不容易知道,但是只要添加譯碼器到圖中后,你將會在表格中看到方向箭頭。它會由你定義,但它取決于你如何正轉(zhuǎn)或反轉(zhuǎn)電機,哪一邊是正轉(zhuǎn)可以明顯地觀察出來。
- 速度單位:此部分也有一些選項,我們最常使用的是RPM。
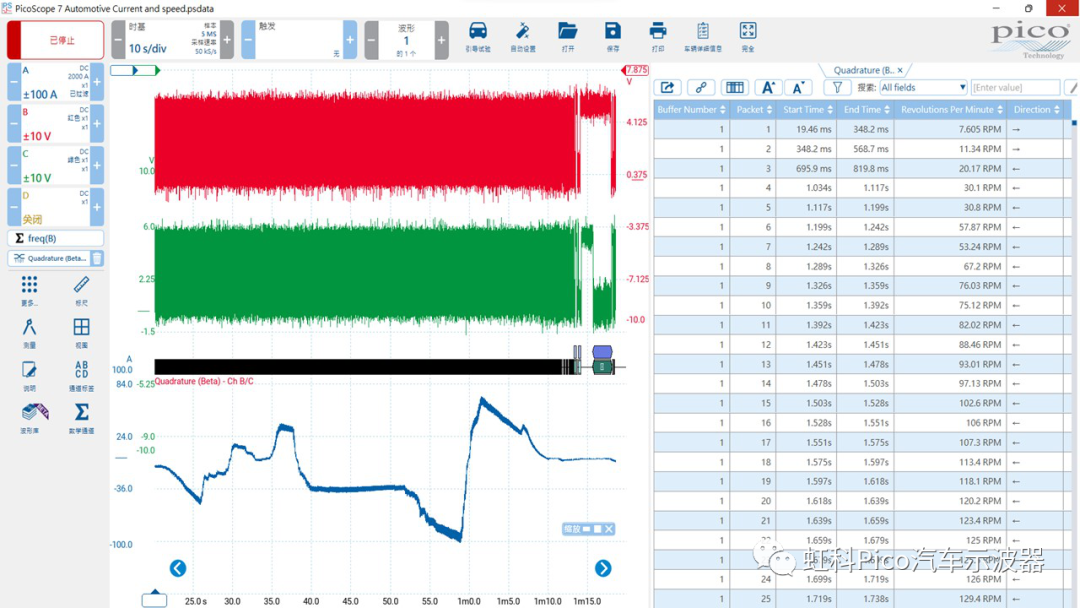
譯碼器數(shù)據(jù)將出現(xiàn)在屏幕下方,與所有PicoScope的譯碼器皆相同,但我已經(jīng)將它移到一旁來使它更容易觀看。
如同你所看到的,我們在表格上得到了速度與旋轉(zhuǎn)方向數(shù)據(jù)。如果你雙擊表格上的條列數(shù)據(jù),它將帶你到圖中的相關(guān)波型區(qū)域。
從這個表格,你可以看出前兩個數(shù)據(jù)包有不同的旋轉(zhuǎn)方向。當(dāng)我們捕獲此信號時,我們在驅(qū)動車輛向前行駛前先輕微倒退了一下。你可以藉由改變A領(lǐng)先B的轉(zhuǎn)動方向定義來修改譯碼器的旋轉(zhuǎn)方向數(shù)據(jù)。
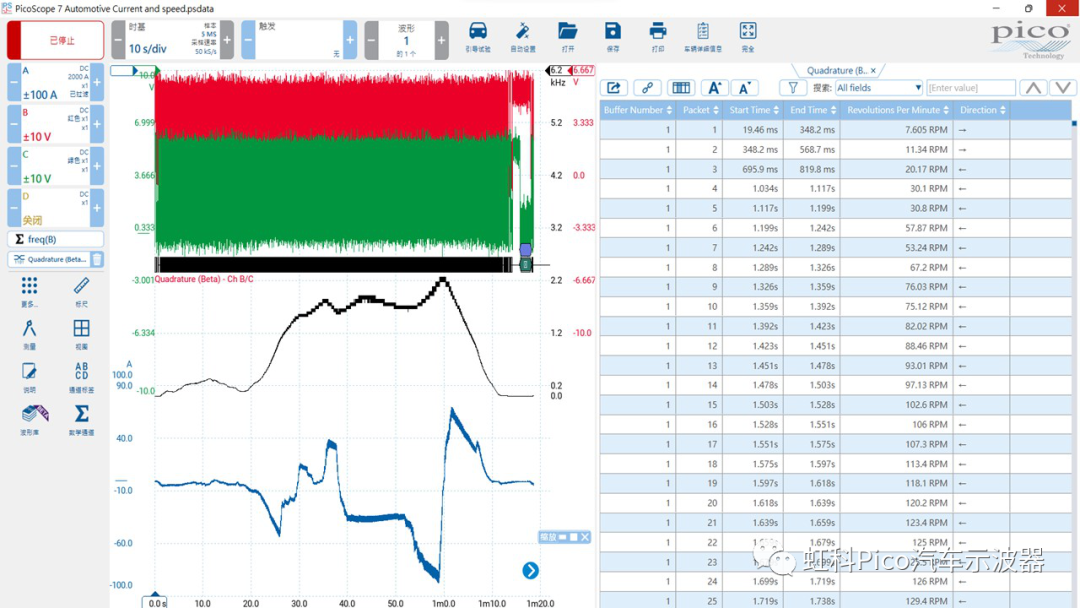
最后,因為信號中的頻率改變會影響速度之?dāng)?shù)據(jù),我們可以添加一個頻率的數(shù)學(xué)通道給其中一個或兩個信號來顯示軸的速度變化量。
我希望這在某種程度上有幫助,如果你有任何關(guān)于正交譯碼器的反饋,請讓我知道。
By PicoAuto – Ben Martins
-
編碼器
+關(guān)注
關(guān)注
45文章
3787瀏覽量
137731
發(fā)布評論請先 登錄
VIVADO自帶Turbo譯碼器IP核怎么用?
軸編碼器與無軸承編碼器,到底如何選擇?

伺服電機編碼器怎么選型

DISCOAA編碼器類型功能
伺服電機編碼器故障及維修

編碼器與譯碼器:功能、原理及應(yīng)用解析
磁編碼器工作原理解析 磁編碼器與光編碼器的比較
增量編碼器與絕對值編碼器的區(qū)別

二進制編碼器與絕對編碼器的區(qū)別
增量編碼器和絕對值編碼器是什么






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論