 聊一聊步進電機的幾件事 還有彩蛋
聊一聊步進電機的幾件事 還有彩蛋

本文希望可以幫助初學者,了解步進電機的工作原理以及如何驅動步進電機。然后給出一個設計實例,如何使用Arduino Mega結合ADI的TMC5130-EVAL來驅動步進電機。
什么是步進電機?步進電機是一種將電脈沖信號轉換成相應角位移或線位移的電動機。對于步進電機,每輸入一個脈沖信號,轉子就轉動一個角度或前進一步。其輸出的角位移或線位移與輸入的脈沖數成正比,轉速與脈沖頻率成正比。因此,步進電動機又稱脈沖電動機。下面看一個簡單的雙極電機:
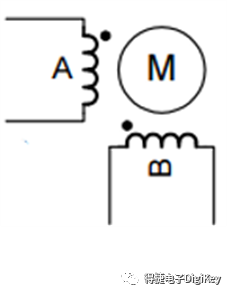
雙極步進電機有四根電線和兩個線圈。要使其旋轉,需要通過線圈發送電流。每根電線都需要能夠被高低驅動。以下是如何驅動電流使步進電機旋轉。
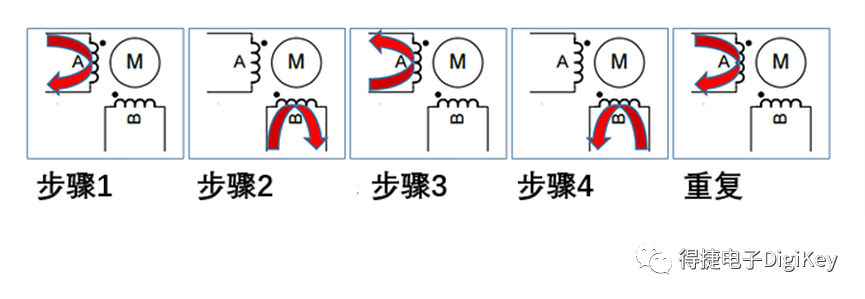 圖 2. 雙極步進電機
圖 2. 雙極步進電機
要理解為什么這樣做,請考慮一個只有四個步驟的簡單步進電機。在第一階段,它將磁體與第一線圈對齊。下一步將磁體旋轉90度。通過第一線圈反向發送電流會反轉磁體極性。相反的線圈被連接,但相對于中心磁體產生相反的磁場。
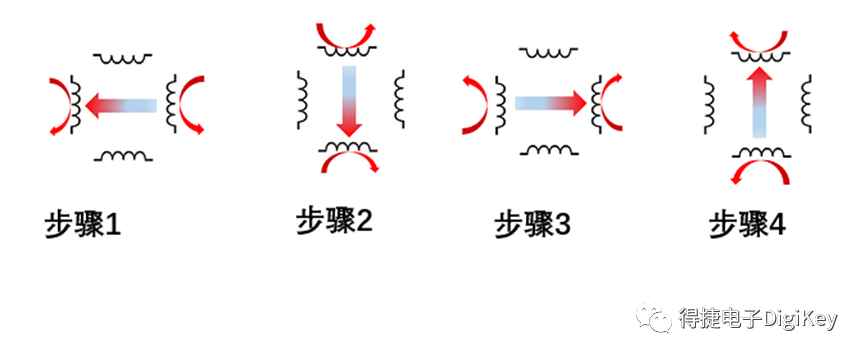 圖 3.步進電機轉動四個步驟
圖 3.步進電機轉動四個步驟
當然,大多數步進電機的步數超過4步。你的標準步進電機每轉200步。以這種方式旋轉電機稱為全步進。一旦你完成了全步工作,半步是非常簡單的。你可以同時通過兩個線圈發送電流,這將使分辨率加倍。
步進電機驅動器也可以使用微步進,微步進調節通過線圈的電流。典型的電機控制器可以在每一個完整的步驟中執行16個微步驟。一些芯片負責調制電流,但較舊的芯片需要為其驅動的步進電機“調諧”。微步進進一步將整個步進劃分為256微步進,使典型的200步進電機變成51200步進電機!微步進還降低了電機的噪音,使其運行更平穩、更高效。
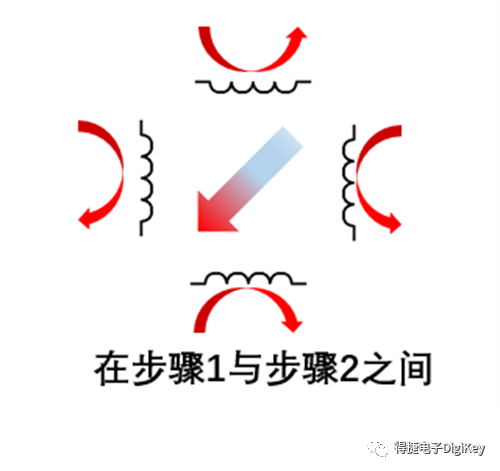 圖 4.完整步驟1和2之間的半步
如何控制線圈中的電流控制通過繞組的電流的最常見設置是使用所謂的H橋。它是一組四個晶體管,可以將每條導線拉高或拉低。你也可以用MOS管代替晶體管,但布線會有點不同。該圖顯示了如何通過H橋向任意方向發送電流。你只需要打開路徑中的晶體管。
圖 4.完整步驟1和2之間的半步
如何控制線圈中的電流控制通過繞組的電流的最常見設置是使用所謂的H橋。它是一組四個晶體管,可以將每條導線拉高或拉低。你也可以用MOS管代替晶體管,但布線會有點不同。該圖顯示了如何通過H橋向任意方向發送電流。你只需要打開路徑中的晶體管。
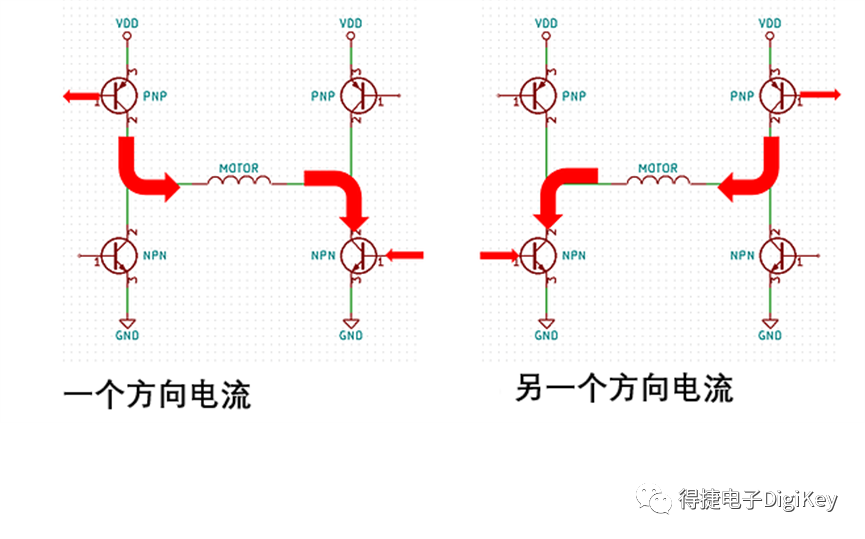 圖5.線圈中的電流方向
圖5.線圈中的電流方向
你必須確保同一側的兩個晶體管不能同時導通。這將通過提供從電源到接地的低電阻路徑使電路短路。你還應注意,晶體管可能需要一段時間才能從接通切換到斷開。除非你知道自己在做什么,否則不建議快速切換通過線圈的電流。
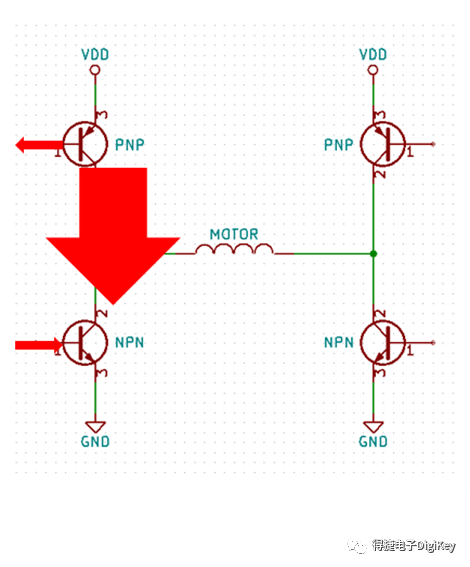 圖 6.必須確保同一側的兩個晶體管不能同時導通這仍然不是全貌。旋轉電機將產生電壓。為了保護晶體管,最好放置二極管。
圖 6.必須確保同一側的兩個晶體管不能同時導通這仍然不是全貌。旋轉電機將產生電壓。為了保護晶體管,最好放置二極管。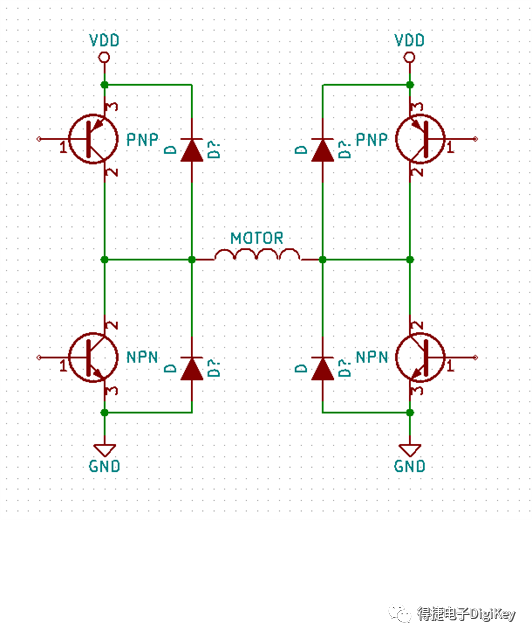 圖7.用于保護晶體管的二極管
圖7.用于保護晶體管的二極管
這將防止電機產生高壓,這可能會破壞晶體管甚至驅動器。如果驅動步進電機的電壓高于MCU輸出的電壓,則需要添加另一個晶體管來控制PNP晶體管。
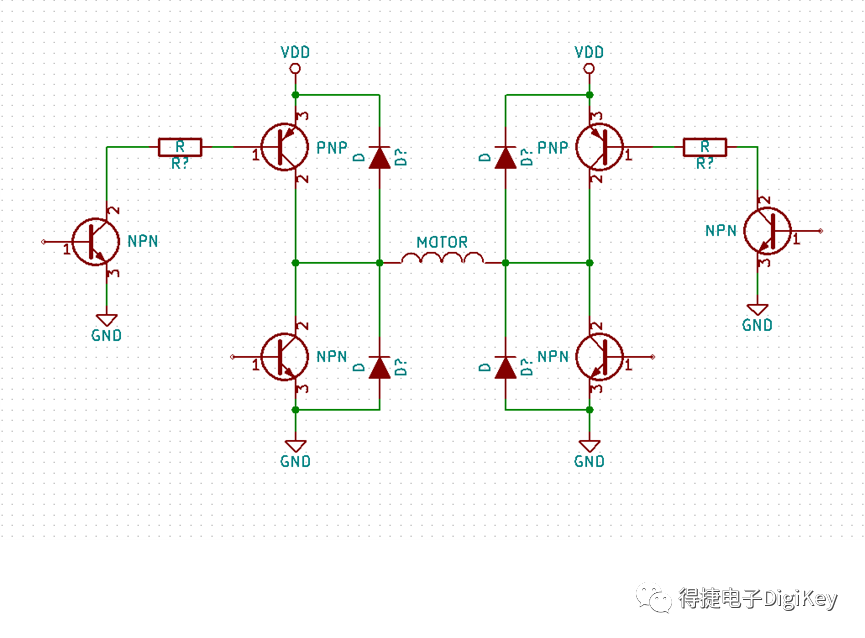 圖8. 使用另一個晶體管來控制PNP晶體管
圖8. 使用另一個晶體管來控制PNP晶體管
當你打開額外的NPN晶體管時,它將允許電流從PNP晶體管的基極(引腳1)流出,從而打開它。現在所需要的只是所有NPN晶體管基極上的限流電阻。
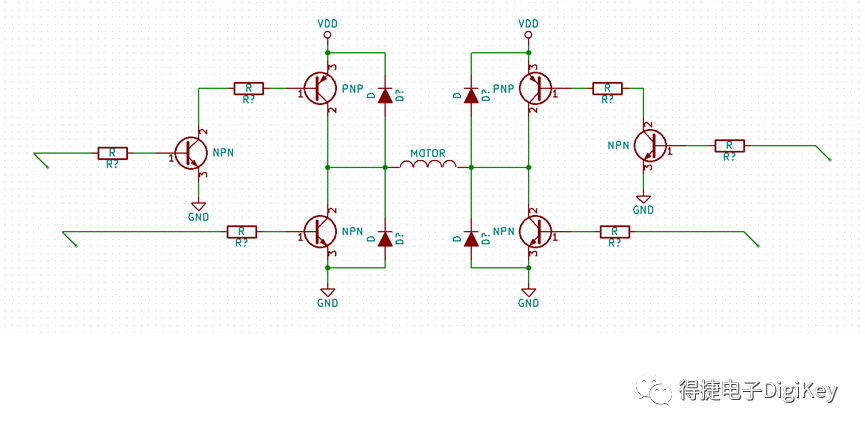 圖 9. NPN晶體管基極加上的限流電阻
圖 9. NPN晶體管基極加上的限流電阻
就是這樣!該H橋將控制通過其中一個繞組的電流。由于有兩個繞組,我們需要將這個電路加倍。
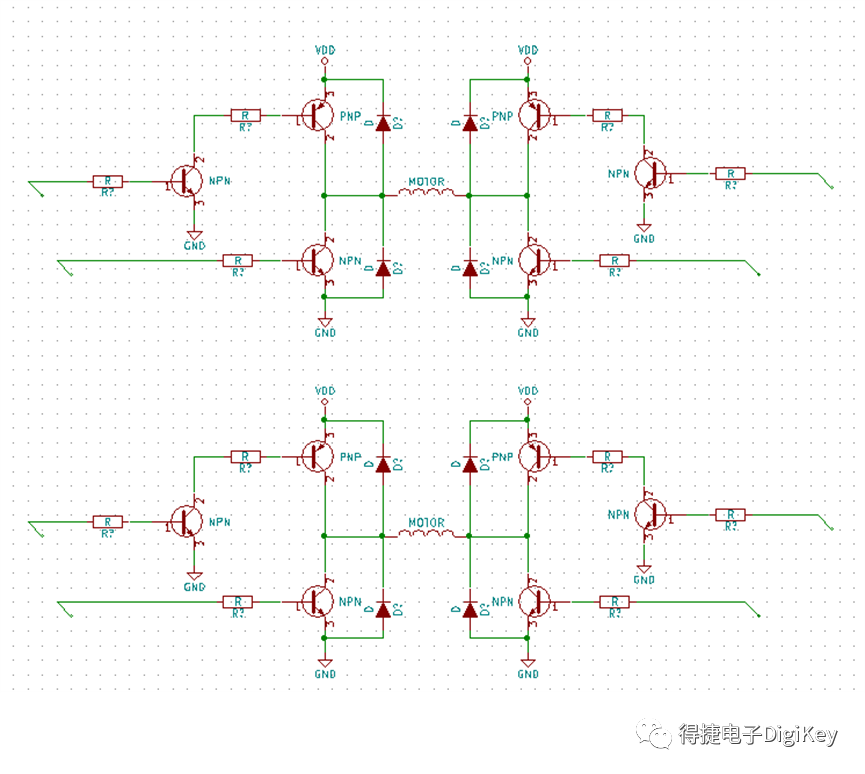 圖10. 雙H橋驅動步進電機
圖10. 雙H橋驅動步進電機
現在,你可以很好地計算所需的組件。使用雙H橋并不是驅動步進電機的唯一方法。你也可以購買步進電機驅動器,它將內置雙H橋(盡管驅動器通常使用MOS管和其他技巧)。如果你想減少BOM數量(有時獲得更多功能),我建議你看看步進電機驅動器。你需要查看數據表以了解芯片提供的功能。一些芯片只提供晶體管和二極管,而其他芯片則完全控制通過線圈的電流。
微步進
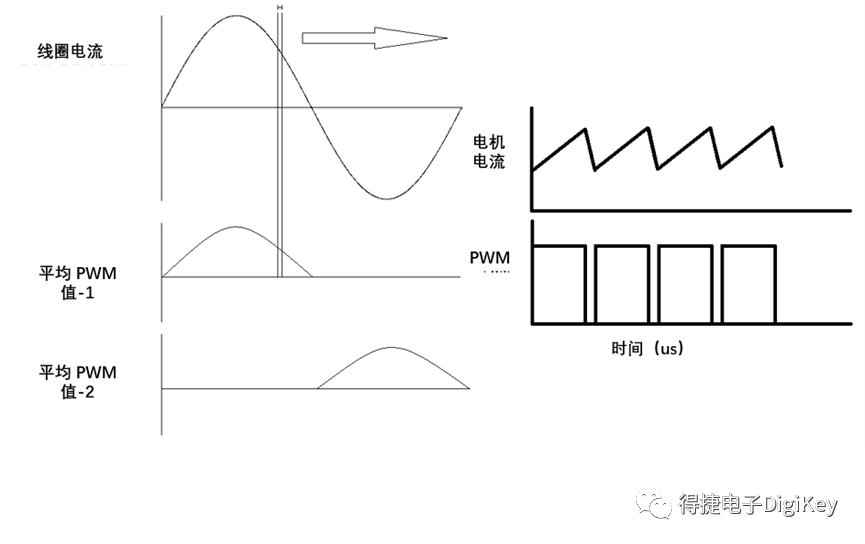 圖11. 脈寬調制信號
圖11. 脈寬調制信號
微步進包括向晶體管發送脈寬調制信號。這是一種控制電機線圈電流的簡單方法。預先選擇的PWM值被放置在正弦查找表中。典型地,選擇20-40kHz的PWM頻率。任何低于20千赫的聲音,人類耳朵都能聽到。頻率保持低于40kHz以提高效率并減少晶體管中的功耗。當PWM信號為高時,電流流過晶體管。當PWM信號低時,電流流過二極管。這是一個非常粗糙的微步進實現,但它給出了它如何工作的一般概念。使用MOS管的電機驅動器可以控制電機電流降低或衰減的速度。驅動器的電流波形更像這樣:
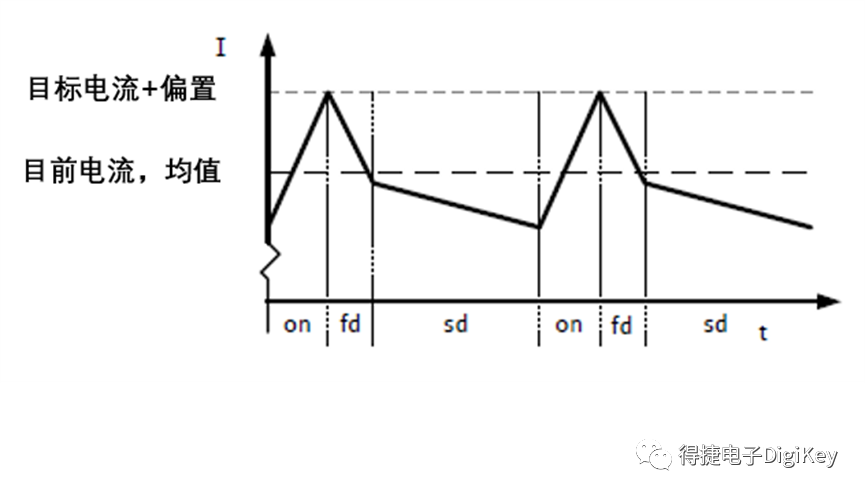 圖 12. 流經MOS管電機驅動器的電流
圖 12. 流經MOS管電機驅動器的電流
必須為其驅動的電機手動優化快速衰減周期和慢速衰減周期。一些新芯片會根據其感應到的電流自動調整衰減周期,但舊芯片可能需要優化(或調整)。
步進電機驅動實例
實例:使用控制板Arduino Mega控制步進電機驅動板TMC5130-EVAL來驅動步進電機。

圖 13.使用Arduino Mega控制步進電機驅動板TMC5130-EVAL
控制器:Arduino Mega 2560是一款基于ATmega2560的微控制器板。它有54個數字輸入/輸出引腳(其中15個可以用作PWM輸出)、16個模擬輸入、4個UART(硬件串行端口)、一個16 MHz晶體振蕩器、一個USB連接、一個電源插座、一個ICSP頭和一個復位按鈕。它包含支持微控制器所需的一切;只需用USB電纜將其連接到計算機,或用交流到直流適配器或電池為其供電即可開始使用。
步進電機驅動板:TMC5130是一個完全集成的步進電機驅動器和控制器系統,允許從任何微控制器遠程控制步進電機。它在硬件上實現了所有實時關鍵任務。一旦配置,電機可以通過給出目標位置、命令歸航序列或給出目標速度來驅動。使用TMC5130的好處包括:易于使用,使用256微步的電機精度,低電機噪聲(無噪聲隱藏斬波器),無傳感器失速檢測(stallGuard2),無階躍損耗,dcStep和coolStep、UART或SPI控制接口的高效率,高電壓范圍,小形狀因數,以及低部件數量。
1. 確保Arduino Mega與TMC5130-EVAL有電壓匹配
如果Arduino是5V控制板,則必須將TMC5130-EVAL上的一個電阻從位置R3重新定位到R8。這將TMC5130的邏輯電平設置為+5V。
2. 連線
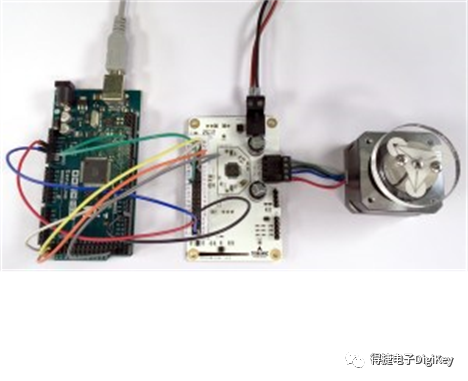 圖 14. TMC5130與ArduinoMega 2560連接 (圖片來源于Trinamic)
圖 14. TMC5130與ArduinoMega 2560連接 (圖片來源于Trinamic)
上圖的電纜顏色
+5V - >紅色
GND - >藍色
SDO - >黃色
SDI - >橙色
SCK - >白色
CSN - >灰色
DRV_ENN - >黑色
CLK16 - >綠色
 圖 15. 引腳對應的信號(圖片來源于Trinamic)引腳對應的信號。在Arduino代碼的注釋部分記錄了配置。
圖 15. 引腳對應的信號(圖片來源于Trinamic)引腳對應的信號。在Arduino代碼的注釋部分記錄了配置。
ARDUINO代碼
下面的Arduino代碼不需要任何額外的庫。SPI庫是Arduino IDE附帶的。該程序初始化TMC5130并執行簡單的移動到位置周期。它將根據步進電機的接線將200全步進電機向一個方向旋轉10轉,向另一個方向旋轉10轉。請使用TMC5130數據表或TMCLIDE作為不同寄存器的參考。
向上滑動查看完整代碼
#include
#include"TMC5130_registers.h"
/* The trinamic TMC5130 motorcontroller and driver operates through an
* SPI interface. Each datagram is sent to thedevice as an address byte
* followed by 4 data bytes. This is 40 bits (8bit address and 32 bit word).
* Each register is specified by a one byte(MSB) address: 0 for read, 1 for
* write. The MSB is transmitted first on therising edge of SCK.
*
* Arduino Pins Eval Board Pins
* 51 MOSI 32 SPI1_SDI
* 50 MISO 33 SPI1_SDO
* 52 SCK 31 SPI1_SCK
* 25 CS 30 SPI1_CSN
* 17 DIO 8 DIO0 (DRV_ENN)
* 11 DIO 23 CLK16
* GND 2 GND
* +5V 5 +5V
*/
int chipCS = 25;
const byte CLOCKOUT = 11;
// const byte CLOCKOUT = 9; --> Uncomment for UNO, Duemilanove,etc...
int enable = 17;
void setup() {
// put your setup code here, to run once:
pinMode(chipCS,OUTPUT);
pinMode(CLOCKOUT,OUTPUT);
pinMode(enable, OUTPUT);
digitalWrite(chipCS,HIGH);
digitalWrite(enable,LOW);
//set up Timer1
TCCR1A = bit (COM1A0); //toggle OC1A onCompare Match
TCCR1B = bit (WGM12) | bit (CS10); //CTC, noprescaling
OCR1A = 0; //output every cycle
SPI.setBitOrder(MSBFIRST);
SPI.setClockDivider(SPI_CLOCK_DIV8);
SPI.setDataMode(SPI_MODE3);
SPI.begin();
Serial.begin(9600);
sendData(0x80,0x00000000); //GCONF
sendData(0xEC,0x000101D5); //CHOPCONF: TOFF=5,HSTRT=5, HEND=3, TBL=2, CHM=0 (spreadcycle)
sendData(0x90,0x00070603); //IHOLD_IRUN:IHOLD=3, IRUN=10 (max.current), IHOLDDELAY=6
sendData(0x91,0x0000000A); //TPOWERDOWN=10
sendData(0xF0,0x00000000); // PWMCONF
//sendData(0xF0,0x000401C8); //PWM_CONF:AUTO=1, 2/1024 Fclk, Switch amp limit=200, grad=1
sendData(0xA4,0x000003E8); //A1=1000
sendData(0xA5,0x000186A0); //V1=100000
sendData(0xA6,0x0000C350); //AMAX=50000
sendData(0xA7,0x000186A0); //VMAX=100000
sendData(0xAA,0x00000578); //D1=1400
sendData(0xAB,0x0000000A); //VSTOP=10
sendData(0xA0,0x00000000); //RAMPMODE=0
sendData(0xA1,0x00000000); //XACTUAL=0
sendData(0xAD,0x00000000); //XTARGET=0
}
void loop()
{
// put your main code here, to run repeatedly:
sendData(0xAD,0x0007D000); //XTARGET=512000 |10 revolutions with micro step = 256
delay(20000);
sendData(0x21,0x00000000);
sendData(0xAD,0x00000000); //XTARGET=0
delay(20000);
sendData(0x21,0x00000000);
}
void sendData(unsigned long address,unsigned long datagram)
{
//TMC5130 takes 40 bit data: 8 address and 32data
delay(100);
uint8_t stat;
unsigned long i_datagram;
digitalWrite(chipCS,LOW);
delayMicroseconds(10);
stat = SPI.transfer(address);
i_datagram |= SPI.transfer((datagram >>24) & 0xff);
i_datagram <<= 8;
i_datagram |= SPI.transfer((datagram >>16) & 0xff);
i_datagram <<= 8;
i_datagram |= SPI.transfer((datagram >>8) & 0xff);
i_datagram <<= 8;
i_datagram |= SPI.transfer((datagram) &0xff);
digitalWrite(chipCS,HIGH);
Serial.print("Received: ");
PrintHex40(stat, i_datagram);
Serial.print(" ");
Serial.print(" from register: ");
Serial.println(address,HEX);
}
void PrintHex40(uint8_t stat, uint32_tdata) // prints 40-bit data in hex with leading zeroes
{
char tmp[16];
uint16_t LSB = data & 0xffff;
uint16_t MSB = data >> 16;
sprintf(tmp, "0x%.2X%.4X%.4X", stat,MSB, LSB);
Serial.print(tmp);
}
代碼來源于:Trinamic 博客(關于代碼的問題,可以去Trinamic博客上了解更多)
總結
希望這篇文章,可以幫助您了解步進電機的工作原理以及如何驅動步進電機。同時驅動步進電機的技術已經很成熟,善于利用現有的硬件和代碼,才能事半功倍。
更多有關電機技術文章,請點擊以下鏈接,也歡迎大家在文末留言討論。
-
如何驅動步進電機
-
電機控制中的軟啟動(Soft Start)
-
一分鐘讀懂:與眾不同的步進電機
-
步進電機每轉步數和步進角
-
計算電機驅動器的功耗
小編的話
隨著科學技術的發展,特別是永磁材料、半導體技術、計算機技術的發展,步進電機在眾多領域得到了廣泛應用,包括工業機器中的汽車儀表和機床自動化生產設備、機器人、安防攝像機、醫用掃描儀、液壓泵、呼吸機和血液分析儀,以及消費攝像機、商用機器及電腦周邊等應用。您是否正在利用步進電機進行電機系統的設計?您在步進電機驅動過程中有哪些設計經驗、心得或疑問?歡迎留言,分享和討論!
秘技知識學不停 專屬福利享不停
就等您加入!
點此登記
賺積分、換好禮
立即到「會員權益」查看您的禮遇! 如有任何問題,歡迎聯系得捷電子DigiKey的客服團隊中國(人民幣)客服
 400-920-1199
400-920-1199 服務支持 > 聯系客服 > 微信客服
服務支持 > 聯系客服 > 微信客服 service.sh@digikey.com
service.sh@digikey.com QQ在線實時咨詢:4009201199
QQ在線實時咨詢:4009201199
中國(美金)/ 香港客服
400-882-4440
852-3104-0500china.support@digikey.com
點擊下方“閱讀原文”查看更多
讓我知道你在看喲
原文標題:聊一聊步進電機的幾件事 還有彩蛋
文章出處:【微信公眾號:得捷電子DigiKey】歡迎添加關注!文章轉載請注明出處。
-
得捷電子
+關注
關注
1文章
255瀏覽量
9725
原文標題:聊一聊步進電機的幾件事 還有彩蛋
文章出處:【微信號:得捷電子DigiKey,微信公眾號:得捷電子DigiKey】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

正點原子 AI BOX0 智能伴侶,1.54寸高清屏+長效續航,語音暢聊,情景對話,知識科普,多色可選,隨身攜帶!
為什么聊自動駕駛的越來越多,聊無人駕駛的越來越少?

行星減速步進電機與步進電機的區別








 工商網監
工商網監
評論