") 用語言建模世界:UC伯克利多模態(tài)世界模型利用語言預(yù)測未來
用語言建模世界:UC伯克利多模態(tài)世界模型利用語言預(yù)測未來

當前,人與智能體(比如機器人)的交互是非常直接的,你告訴它「拿一塊藍色的積木」,它就會幫你拿過來。但現(xiàn)實世界的很多信息并非那么直接,比如「扳手可以用來擰緊螺母」、「我們的牛奶喝完了」。這些信息不能直接拿來當成指令,但卻蘊含著豐富的世界信息。智能體很難了解這些語言在世界上的含義。 基于此,他們提出了 Dynalang,一種從在線經(jīng)驗中學習語言和圖像世界模型,并利用該模型學習如何行動的智能體。
Dynalang 將學習用語言對世界建模(帶有預(yù)測目標的監(jiān)督學習)與學習根據(jù)該模型采取行動(帶有任務(wù)獎勵的強化學習)分離開來。該世界模型接收視覺和文本輸入作為觀察模態(tài),并將它們壓縮到潛在空間。研究者通過在線收集的經(jīng)驗訓練世界模型,使其能夠預(yù)測未來的潛在表示,同時智能體在環(huán)境中執(zhí)行任務(wù)。他們通過將世界模型的潛在表示作為輸入,訓練策略來采取最大化任務(wù)獎勵的行動。由于世界建模與行動分離,Dynalang 可以在沒有行動或任務(wù)獎勵的單模態(tài)數(shù)據(jù)(僅文本或僅視頻數(shù)據(jù))上進行預(yù)訓練。
此外,他們的框架還可以統(tǒng)一語言生成:智能體的感知可以影響智能體的語言模型(即其對未來 token 的預(yù)測),使其能夠通過在動作空間輸出語言來描述環(huán)境。
基于此,他們提出了 Dynalang,一種從在線經(jīng)驗中學習語言和圖像世界模型,并利用該模型學習如何行動的智能體。
Dynalang 將學習用語言對世界建模(帶有預(yù)測目標的監(jiān)督學習)與學習根據(jù)該模型采取行動(帶有任務(wù)獎勵的強化學習)分離開來。該世界模型接收視覺和文本輸入作為觀察模態(tài),并將它們壓縮到潛在空間。研究者通過在線收集的經(jīng)驗訓練世界模型,使其能夠預(yù)測未來的潛在表示,同時智能體在環(huán)境中執(zhí)行任務(wù)。他們通過將世界模型的潛在表示作為輸入,訓練策略來采取最大化任務(wù)獎勵的行動。由于世界建模與行動分離,Dynalang 可以在沒有行動或任務(wù)獎勵的單模態(tài)數(shù)據(jù)(僅文本或僅視頻數(shù)據(jù))上進行預(yù)訓練。
此外,他們的框架還可以統(tǒng)一語言生成:智能體的感知可以影響智能體的語言模型(即其對未來 token 的預(yù)測),使其能夠通過在動作空間輸出語言來描述環(huán)境。
 ?論文鏈接:https://arxiv.org/pdf/2308.01399.pdf項目主頁:https://dynalang.github.io/代碼鏈接:https://github.com/jlin816/dynalang
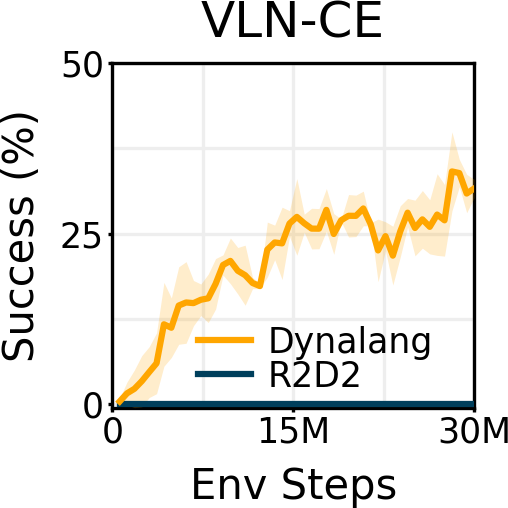
研究者在具有不同類型語言上下文的多樣化環(huán)境中對 Dynalang 進行了評估。在一個多任務(wù)家庭清潔環(huán)境中,Dynalang 學會利用關(guān)于未來觀察、環(huán)境動態(tài)和修正的語言提示,更高效地完成任務(wù)。在 Messenger 基準測試中,Dynalang 可以閱讀游戲手冊來應(yīng)對最具挑戰(zhàn)性的游戲階段,優(yōu)于特定任務(wù)的架構(gòu)。在視覺 - 語言導(dǎo)航中,研究者證明 Dynalang 可以學會在視覺和語言復(fù)雜的環(huán)境中遵循指令。
?論文鏈接:https://arxiv.org/pdf/2308.01399.pdf項目主頁:https://dynalang.github.io/代碼鏈接:https://github.com/jlin816/dynalang
研究者在具有不同類型語言上下文的多樣化環(huán)境中對 Dynalang 進行了評估。在一個多任務(wù)家庭清潔環(huán)境中,Dynalang 學會利用關(guān)于未來觀察、環(huán)境動態(tài)和修正的語言提示,更高效地完成任務(wù)。在 Messenger 基準測試中,Dynalang 可以閱讀游戲手冊來應(yīng)對最具挑戰(zhàn)性的游戲階段,優(yōu)于特定任務(wù)的架構(gòu)。在視覺 - 語言導(dǎo)航中,研究者證明 Dynalang 可以學會在視覺和語言復(fù)雜的環(huán)境中遵循指令。
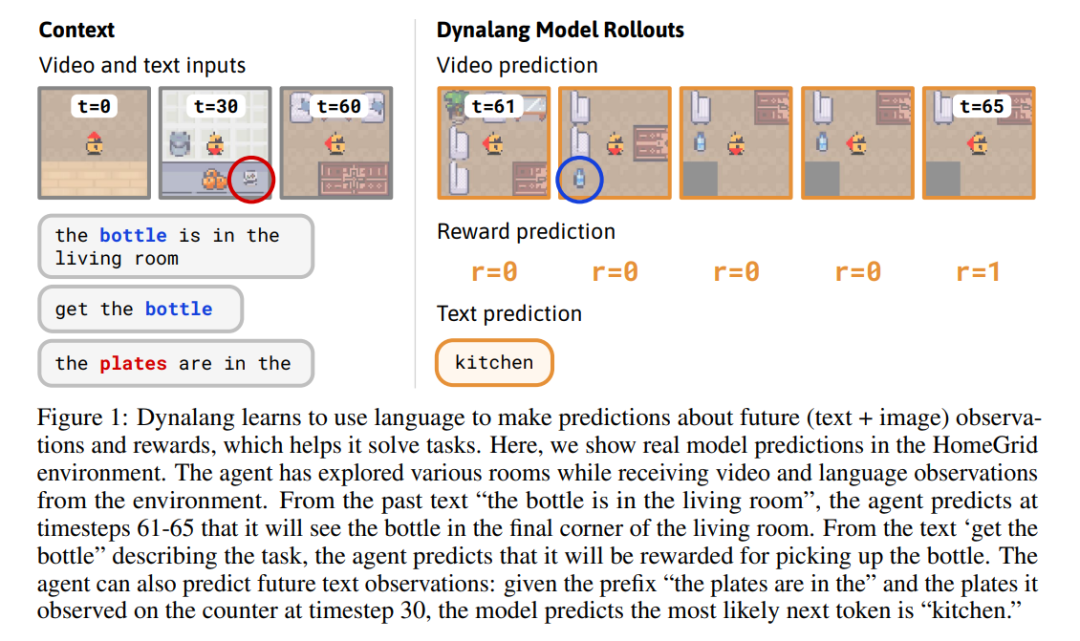 Dynalang 學會使用語言來預(yù)測未來的(文本 + 圖像)觀察結(jié)果和獎勵,從而幫助解決任務(wù)。在這里,研究者展示了在 HomeGrid 環(huán)境中真實的模型預(yù)測結(jié)果。智能體在接收環(huán)境中的視頻和語言觀察的同時,探索了各種房間。根據(jù)過去的文本「瓶子在客廳」,在時間步 61-65,智能體預(yù)測將在客廳的最后一個角落看到瓶子。根據(jù)描述任務(wù)的文本「拿起瓶子」,智能體預(yù)測將因為拿起瓶子而獲得獎勵。智能體還可以預(yù)測未來的文本觀察:在時間步 30,給定前半句「盤子在」,并觀察到櫥柜上的盤子,模型預(yù)測下一個最可能的 token 是「廚房」。
Dynalang 學會使用語言來預(yù)測未來的(文本 + 圖像)觀察結(jié)果和獎勵,從而幫助解決任務(wù)。在這里,研究者展示了在 HomeGrid 環(huán)境中真實的模型預(yù)測結(jié)果。智能體在接收環(huán)境中的視頻和語言觀察的同時,探索了各種房間。根據(jù)過去的文本「瓶子在客廳」,在時間步 61-65,智能體預(yù)測將在客廳的最后一個角落看到瓶子。根據(jù)描述任務(wù)的文本「拿起瓶子」,智能體預(yù)測將因為拿起瓶子而獲得獎勵。智能體還可以預(yù)測未來的文本觀察:在時間步 30,給定前半句「盤子在」,并觀察到櫥柜上的盤子,模型預(yù)測下一個最可能的 token 是「廚房」。
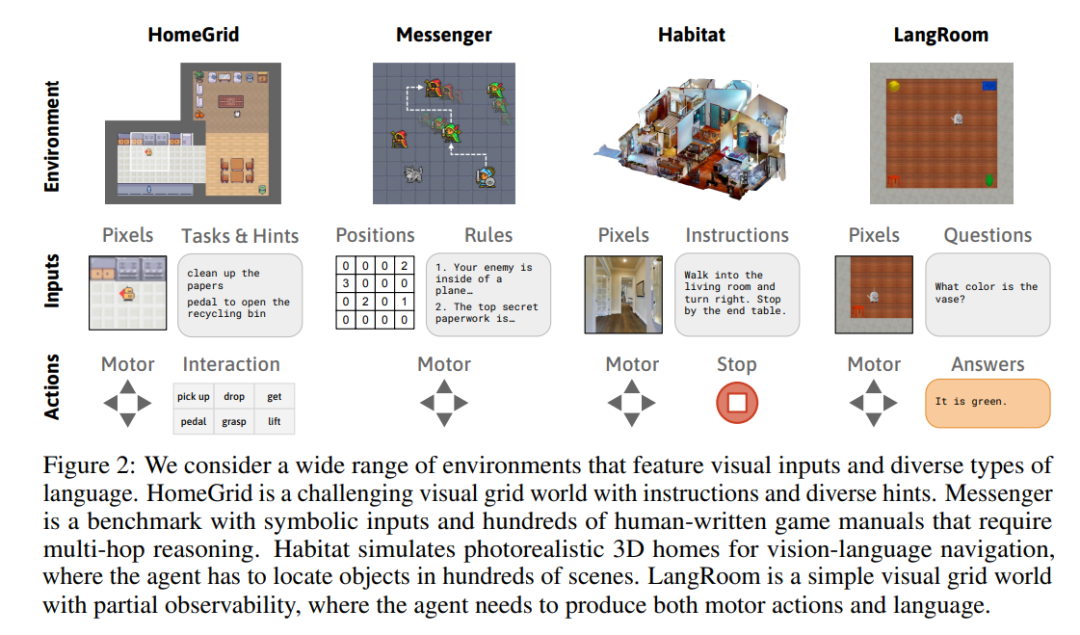 研究者考慮了一系列具有視覺輸入和多樣化語言的環(huán)境。HomeGrid 是一個具有指令和多樣化提示的具有挑戰(zhàn)性的視覺網(wǎng)格世界。Messenger 是一個具有符號輸入的基準測試,包含數(shù)百個人工編寫的游戲手冊,需要進行多次推理。Habitat 是一個模擬逼真的 3D 家居環(huán)境,用于視覺 - 語言導(dǎo)航,在其中智能體必須在數(shù)百個場景中定位物體。LangRoom 是一個簡單的視覺網(wǎng)格世界,具有部分可觀察性,智能體需要同時生成動作和語言。
詳解 Dynalang 工作原理
使用語言來理解世界很自然地符合世界建模范式。這項工作構(gòu)建在 DreamerV3 的基礎(chǔ)之上,DreamerV3 是一種基于模型的強化學習智能體。Dynalang 不斷地從經(jīng)驗數(shù)據(jù)中學習,這些數(shù)據(jù)是智能體在環(huán)境中執(zhí)行任務(wù)時收集到的。
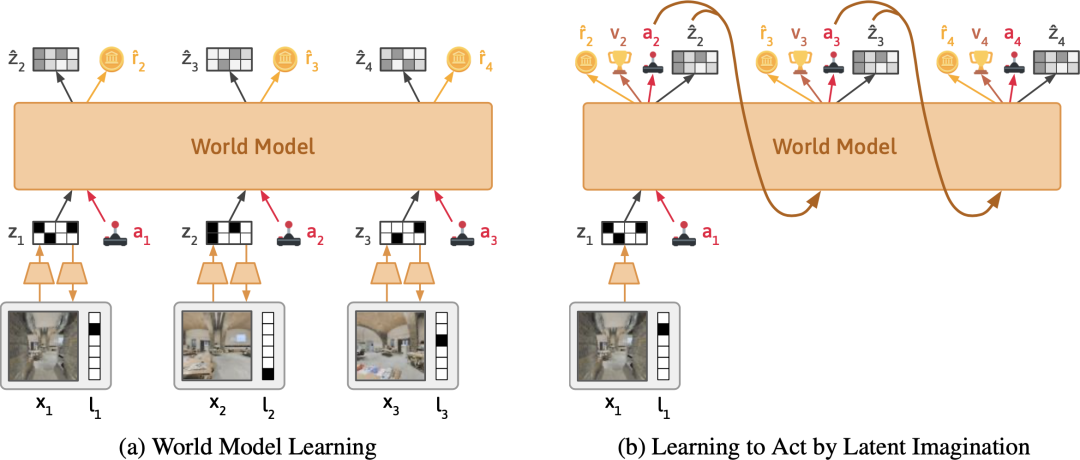
如下圖(左)所示,在每個時間步,世界模型將文本和圖像壓縮成潛在表示。通過這個表示,模型被訓練用于重建原始觀察結(jié)果、預(yù)測獎勵,并預(yù)測下一個時間步的表示。直觀地說,世界模型根據(jù)它在文本中讀到的內(nèi)容,學習它應(yīng)該期望在世界中看到什么。
如下圖(右)所示,Dynalang 通過在壓縮的世界模型表示之上訓練策略網(wǎng)絡(luò)來選擇行動。它通過來自世界模型的想象的模擬結(jié)果進行訓練,并學會采取能夠最大化預(yù)測獎勵的行動。
研究者考慮了一系列具有視覺輸入和多樣化語言的環(huán)境。HomeGrid 是一個具有指令和多樣化提示的具有挑戰(zhàn)性的視覺網(wǎng)格世界。Messenger 是一個具有符號輸入的基準測試,包含數(shù)百個人工編寫的游戲手冊,需要進行多次推理。Habitat 是一個模擬逼真的 3D 家居環(huán)境,用于視覺 - 語言導(dǎo)航,在其中智能體必須在數(shù)百個場景中定位物體。LangRoom 是一個簡單的視覺網(wǎng)格世界,具有部分可觀察性,智能體需要同時生成動作和語言。
詳解 Dynalang 工作原理
使用語言來理解世界很自然地符合世界建模范式。這項工作構(gòu)建在 DreamerV3 的基礎(chǔ)之上,DreamerV3 是一種基于模型的強化學習智能體。Dynalang 不斷地從經(jīng)驗數(shù)據(jù)中學習,這些數(shù)據(jù)是智能體在環(huán)境中執(zhí)行任務(wù)時收集到的。
如下圖(左)所示,在每個時間步,世界模型將文本和圖像壓縮成潛在表示。通過這個表示,模型被訓練用于重建原始觀察結(jié)果、預(yù)測獎勵,并預(yù)測下一個時間步的表示。直觀地說,世界模型根據(jù)它在文本中讀到的內(nèi)容,學習它應(yīng)該期望在世界中看到什么。
如下圖(右)所示,Dynalang 通過在壓縮的世界模型表示之上訓練策略網(wǎng)絡(luò)來選擇行動。它通過來自世界模型的想象的模擬結(jié)果進行訓練,并學會采取能夠最大化預(yù)測獎勵的行動。
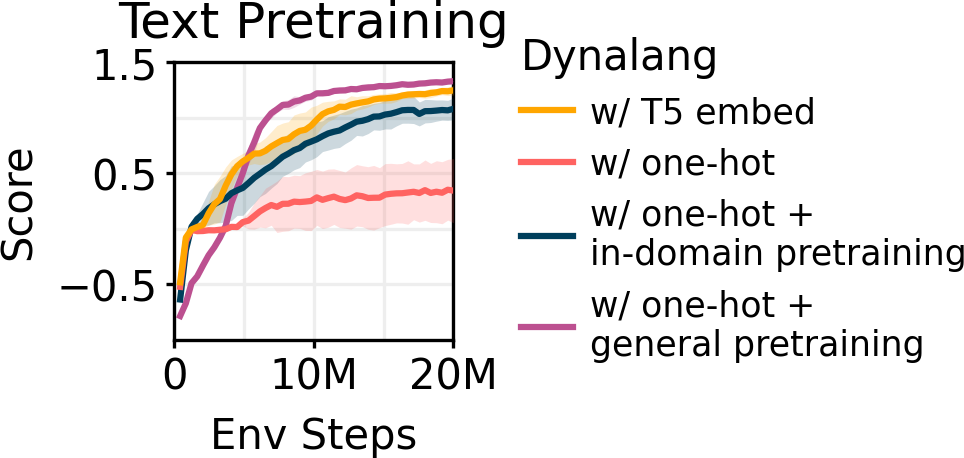
 與之前逐句或逐段消耗文本的多模態(tài)模型不同,研究者設(shè)計的 Dynalang 將視頻和文本作為一個統(tǒng)一的序列來建模,一次處理一幀圖像和一個文本 token。直觀來說,這類似于人類在現(xiàn)實世界中接收輸入的方式 —— 作為一個單一的多模態(tài)流,人需要時間來聆聽語言。將所有內(nèi)容建模為一個序列使得模型可以像語言模型一樣在文本數(shù)據(jù)上進行預(yù)訓練,并提高強化學習的性能。
HomeGrid 中的語言提示
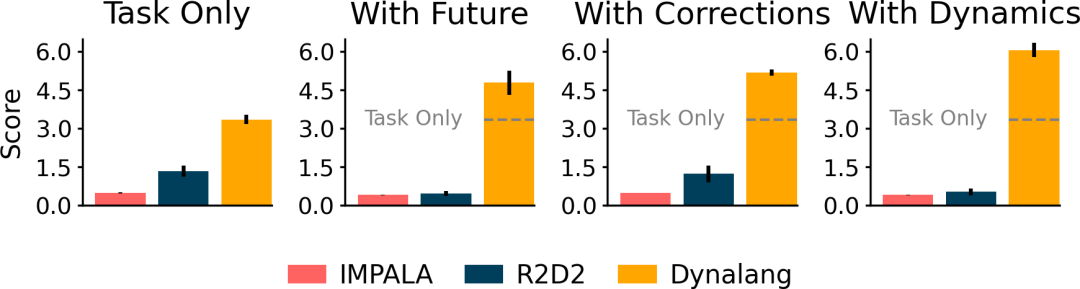
研究者引入了 HomeGrid 來評估一個環(huán)境中的智能體。在這個環(huán)境中,智能體除了任務(wù)指令外還會收到語言提示。
HomeGrid 是一個具有指令和多樣化提示的具有挑戰(zhàn)性的視覺網(wǎng)格世界。HomeGrid 中的提示模擬了智能體可能從人類那里學到或從文本中獲取的知識,提供了對解決任務(wù)有幫助但不是必需的信息:
未來觀察:描述了智能體未來可能觀察到的情況,比如「盤子在廚房里」。
與之前逐句或逐段消耗文本的多模態(tài)模型不同,研究者設(shè)計的 Dynalang 將視頻和文本作為一個統(tǒng)一的序列來建模,一次處理一幀圖像和一個文本 token。直觀來說,這類似于人類在現(xiàn)實世界中接收輸入的方式 —— 作為一個單一的多模態(tài)流,人需要時間來聆聽語言。將所有內(nèi)容建模為一個序列使得模型可以像語言模型一樣在文本數(shù)據(jù)上進行預(yù)訓練,并提高強化學習的性能。
HomeGrid 中的語言提示
研究者引入了 HomeGrid 來評估一個環(huán)境中的智能體。在這個環(huán)境中,智能體除了任務(wù)指令外還會收到語言提示。
HomeGrid 是一個具有指令和多樣化提示的具有挑戰(zhàn)性的視覺網(wǎng)格世界。HomeGrid 中的提示模擬了智能體可能從人類那里學到或從文本中獲取的知識,提供了對解決任務(wù)有幫助但不是必需的信息:
未來觀察:描述了智能體未來可能觀察到的情況,比如「盤子在廚房里」。
 Dynamics:描述了環(huán)境的動態(tài)變化,比如「踩踏板打開垃圾桶」。
Dynamics:描述了環(huán)境的動態(tài)變化,比如「踩踏板打開垃圾桶」。
 Messenger 中的游戲手冊
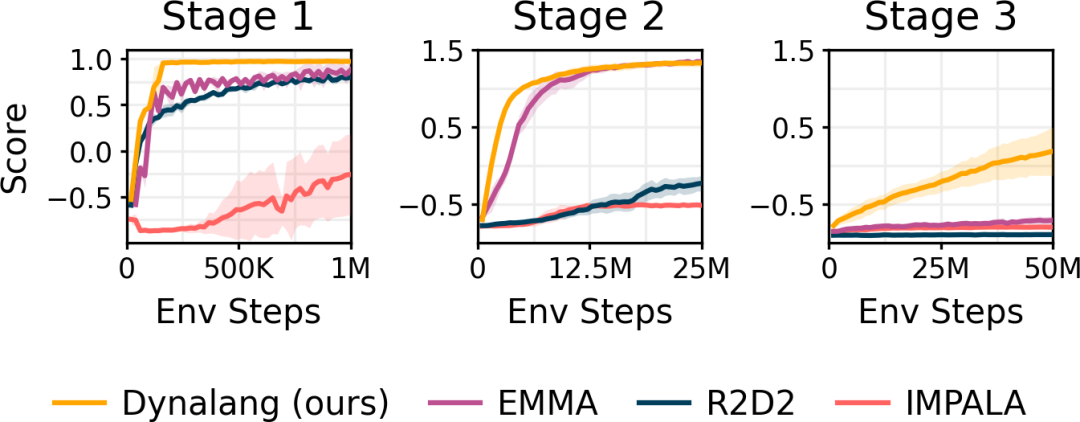
研究者在 Messenger 游戲環(huán)境中進行評估,以測試智能體如何從更長、更復(fù)雜的文本中學習,這需要對文本和視覺觀察進行多次推理。智能體必須對描述每個任務(wù)動態(tài)的文本手冊進行推理,并將其與環(huán)境中實體的觀察結(jié)果結(jié)合起來,以確定哪些實體應(yīng)該接收消息,哪些應(yīng)該避免。Dynalang 的表現(xiàn)優(yōu)于 IMPALA、R2D2 以及使用專門架構(gòu)對文本和觀察進行推理的任務(wù)特定 EMMA 基線,特別是在最困難的第三階段。
Messenger 中的游戲手冊
研究者在 Messenger 游戲環(huán)境中進行評估,以測試智能體如何從更長、更復(fù)雜的文本中學習,這需要對文本和視覺觀察進行多次推理。智能體必須對描述每個任務(wù)動態(tài)的文本手冊進行推理,并將其與環(huán)境中實體的觀察結(jié)果結(jié)合起來,以確定哪些實體應(yīng)該接收消息,哪些應(yīng)該避免。Dynalang 的表現(xiàn)優(yōu)于 IMPALA、R2D2 以及使用專門架構(gòu)對文本和觀察進行推理的任務(wù)特定 EMMA 基線,特別是在最困難的第三階段。
 ?
? ?
? ?
? ?基于 LangRoom 的語言生成
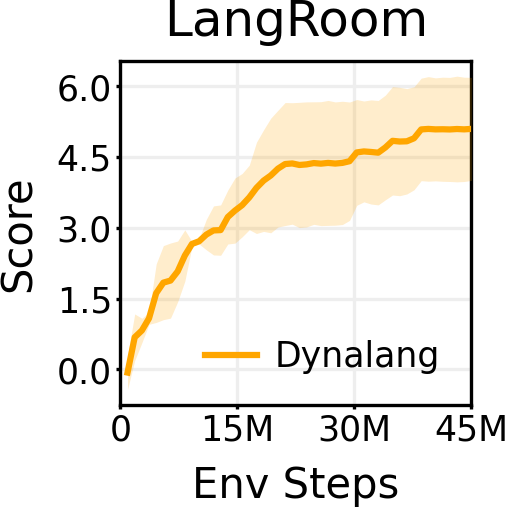
就像語言可以影響智能體對將要看到的事物的預(yù)測一樣,智能體觀察到的內(nèi)容也會影響它對將要聽到的語言的期望(例如,關(guān)于它所看到的內(nèi)容的真實陳述)。通過在 LangRoom 中將語言輸出到動作空間,研究者展示了 Dynalang 可以生成與環(huán)境相關(guān)聯(lián)的語言,從而進行具身問答。LangRoom 是一個簡單的視覺網(wǎng)格世界,具有部分可觀察性,智能體需要在其中產(chǎn)生運動動作和語言。
?基于 LangRoom 的語言生成
就像語言可以影響智能體對將要看到的事物的預(yù)測一樣,智能體觀察到的內(nèi)容也會影響它對將要聽到的語言的期望(例如,關(guān)于它所看到的內(nèi)容的真實陳述)。通過在 LangRoom 中將語言輸出到動作空間,研究者展示了 Dynalang 可以生成與環(huán)境相關(guān)聯(lián)的語言,從而進行具身問答。LangRoom 是一個簡單的視覺網(wǎng)格世界,具有部分可觀察性,智能體需要在其中產(chǎn)生運動動作和語言。
 研究者表示,盡管他們的工作專注于用于在世界中行動的語言理解,但它也可以像一個僅文本語言模型一樣從世界模型中生成文本。研究者在潛在空間中對預(yù)訓練的 TinyStories 模型進行模擬的抽樣,然后在每個時間步驟從表示中解碼 token 觀察。盡管生成的文本質(zhì)量仍然低于當前語言模型的水平,但模型生成的文本令人驚訝地連貫。他們認為將語言生成和行動統(tǒng)一在一個智能體架構(gòu)中是未來研究的一個令人興奮的方向。
研究者表示,盡管他們的工作專注于用于在世界中行動的語言理解,但它也可以像一個僅文本語言模型一樣從世界模型中生成文本。研究者在潛在空間中對預(yù)訓練的 TinyStories 模型進行模擬的抽樣,然后在每個時間步驟從表示中解碼 token 觀察。盡管生成的文本質(zhì)量仍然低于當前語言模型的水平,但模型生成的文本令人驚訝地連貫。他們認為將語言生成和行動統(tǒng)一在一個智能體架構(gòu)中是未來研究的一個令人興奮的方向。
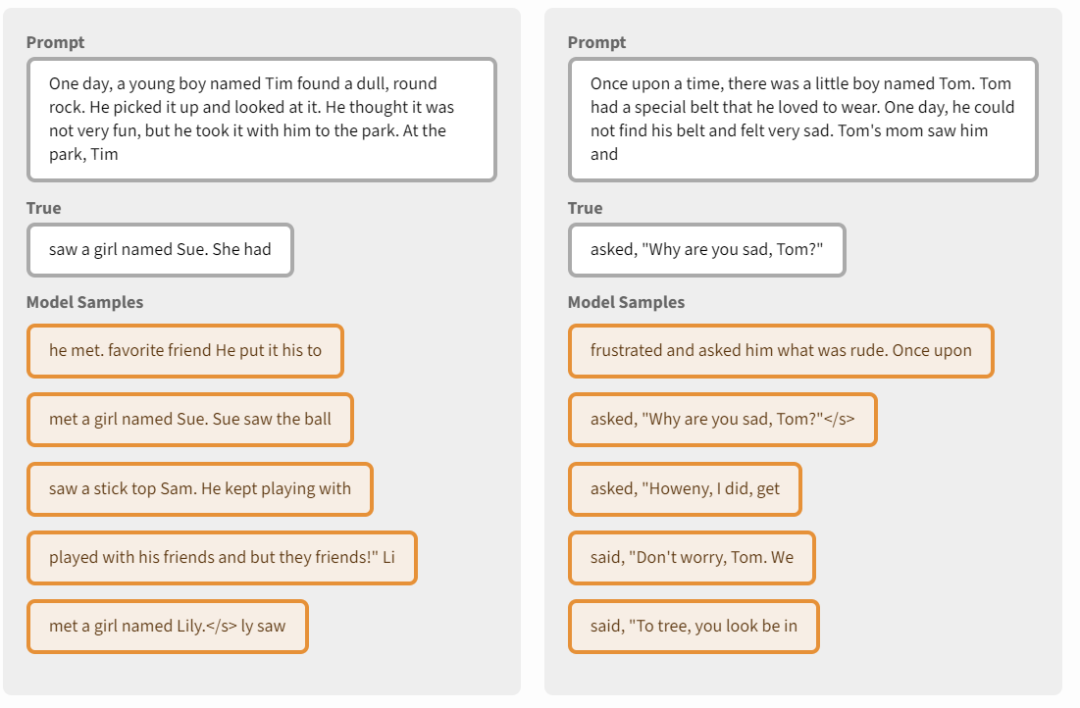
圖源:谷歌機器人團隊論文「Interactive Language: Talking to Robots in Real Time」。
UC 伯克利 Dynalang 研究的關(guān)鍵思想是,我們可以將語言看作是幫助我們更好地對世界進行預(yù)測的工具,比如「我們的牛奶喝完了」→打開冰箱時沒有牛奶;「扳手可以用來擰緊螺母」→使用工具時螺母會旋轉(zhuǎn)。Dynalang 在一個模型中結(jié)合了語言模型(LM)和世界模型(WM),使得這種范式變成多模態(tài)。研究者認為,將語言生成和行動統(tǒng)一在一個智能體架構(gòu)中是未來研究的一個令人興奮的方向。
論文概覽 人工智能長期以來的目標是開發(fā)能夠在物理世界中與人類自然交互的智能體。當前的具身智能體可以遵循簡單的低層指令,比如「拿一塊藍色的積木」或者「經(jīng)過電梯,然后向右轉(zhuǎn)」。 然而,要實現(xiàn)自由交流的互動智能體,就需要理解人們在「此時此地」之外使用語言的完整方式,包括:傳遞知識,比如「左上角的按鈕是關(guān)掉電視的」;提供情境信息,如「我們的牛奶喝完了」;以及協(xié)同,比如跟別人說「我已經(jīng)吸過客廳了」。我們在文本中閱讀的很多內(nèi)容或者從他人口中聽到的信息都在傳遞有關(guān)世界的知識,無論是關(guān)于世界如何運行還是關(guān)于當前世界狀態(tài)的知識。 我們?nèi)绾问怪悄荏w能夠使用多樣化的語言呢?一種訓練基于語言的智能體解決任務(wù)的方法是強化學習(RL)。然而,目前的基于語言的 RL 方法主要是學習從特定任務(wù)指令生成行動,例如將目標描述「拿起藍色的積木」作為輸入,輸出一系列運動控制。 然而,當考慮到自然語言在現(xiàn)實世界中所服務(wù)的多樣功能時,直接將語言映射到最優(yōu)行動是一個具有挑戰(zhàn)性的學習問題。以「我把碗放好了」為例:如果任務(wù)是清洗,智能體應(yīng)該繼續(xù)進行下一個清洗步驟;而如果是晚餐服務(wù),智能體應(yīng)該去取碗。當語言不涉及任務(wù)時,它只與智能體應(yīng)該采取的最優(yōu)行動弱相關(guān)。將語言映射到行動,尤其是僅使用任務(wù)獎勵,對于學會使用多樣化語言輸入完成任務(wù)來說是一個弱學習信號。 不同的是,UC 伯克利的研究者提出,智能體使用語言的一種統(tǒng)一方法是幫助它們預(yù)測未來。前面提到的語句「我把碗放好了」有助于智能體更好地預(yù)測未來的觀察結(jié)果(即,如果它采取行動打開櫥柜,它將在那里看到碗)。 我們遇到的很多語言可以通過這種方式與視覺體驗聯(lián)系起來。先前的知識,比如「扳手可以用來擰緊螺母」,幫助智能體預(yù)測環(huán)境變化。諸如「包裹在外面」的陳述有助于智能體預(yù)測未來的觀察結(jié)果。這個框架還將標準指令遵循歸入預(yù)測范疇:指令幫助智能體預(yù)測自己將如何受到獎勵。類似于下一個 token 預(yù)測允許語言模型形成關(guān)于世界知識的內(nèi)部表示,研究者假設(shè)預(yù)測未來的表示為智能體理解語言以及它與世界的關(guān)系提供了豐富的學習信號。
基于此,他們提出了 Dynalang,一種從在線經(jīng)驗中學習語言和圖像世界模型,并利用該模型學習如何行動的智能體。
Dynalang 將學習用語言對世界建模(帶有預(yù)測目標的監(jiān)督學習)與學習根據(jù)該模型采取行動(帶有任務(wù)獎勵的強化學習)分離開來。該世界模型接收視覺和文本輸入作為觀察模態(tài),并將它們壓縮到潛在空間。研究者通過在線收集的經(jīng)驗訓練世界模型,使其能夠預(yù)測未來的潛在表示,同時智能體在環(huán)境中執(zhí)行任務(wù)。他們通過將世界模型的潛在表示作為輸入,訓練策略來采取最大化任務(wù)獎勵的行動。由于世界建模與行動分離,Dynalang 可以在沒有行動或任務(wù)獎勵的單模態(tài)數(shù)據(jù)(僅文本或僅視頻數(shù)據(jù))上進行預(yù)訓練。
此外,他們的框架還可以統(tǒng)一語言生成:智能體的感知可以影響智能體的語言模型(即其對未來 token 的預(yù)測),使其能夠通過在動作空間輸出語言來描述環(huán)境。
?論文鏈接:https://arxiv.org/pdf/2308.01399.pdf項目主頁:https://dynalang.github.io/代碼鏈接:https://github.com/jlin816/dynalang
研究者在具有不同類型語言上下文的多樣化環(huán)境中對 Dynalang 進行了評估。在一個多任務(wù)家庭清潔環(huán)境中,Dynalang 學會利用關(guān)于未來觀察、環(huán)境動態(tài)和修正的語言提示,更高效地完成任務(wù)。在 Messenger 基準測試中,Dynalang 可以閱讀游戲手冊來應(yīng)對最具挑戰(zhàn)性的游戲階段,優(yōu)于特定任務(wù)的架構(gòu)。在視覺 - 語言導(dǎo)航中,研究者證明 Dynalang 可以學會在視覺和語言復(fù)雜的環(huán)境中遵循指令。
Dynalang 學會使用語言來預(yù)測未來的(文本 + 圖像)觀察結(jié)果和獎勵,從而幫助解決任務(wù)。在這里,研究者展示了在 HomeGrid 環(huán)境中真實的模型預(yù)測結(jié)果。智能體在接收環(huán)境中的視頻和語言觀察的同時,探索了各種房間。根據(jù)過去的文本「瓶子在客廳」,在時間步 61-65,智能體預(yù)測將在客廳的最后一個角落看到瓶子。根據(jù)描述任務(wù)的文本「拿起瓶子」,智能體預(yù)測將因為拿起瓶子而獲得獎勵。智能體還可以預(yù)測未來的文本觀察:在時間步 30,給定前半句「盤子在」,并觀察到櫥柜上的盤子,模型預(yù)測下一個最可能的 token 是「廚房」。
研究者考慮了一系列具有視覺輸入和多樣化語言的環(huán)境。HomeGrid 是一個具有指令和多樣化提示的具有挑戰(zhàn)性的視覺網(wǎng)格世界。Messenger 是一個具有符號輸入的基準測試,包含數(shù)百個人工編寫的游戲手冊,需要進行多次推理。Habitat 是一個模擬逼真的 3D 家居環(huán)境,用于視覺 - 語言導(dǎo)航,在其中智能體必須在數(shù)百個場景中定位物體。LangRoom 是一個簡單的視覺網(wǎng)格世界,具有部分可觀察性,智能體需要同時生成動作和語言。
詳解 Dynalang 工作原理
使用語言來理解世界很自然地符合世界建模范式。這項工作構(gòu)建在 DreamerV3 的基礎(chǔ)之上,DreamerV3 是一種基于模型的強化學習智能體。Dynalang 不斷地從經(jīng)驗數(shù)據(jù)中學習,這些數(shù)據(jù)是智能體在環(huán)境中執(zhí)行任務(wù)時收集到的。
如下圖(左)所示,在每個時間步,世界模型將文本和圖像壓縮成潛在表示。通過這個表示,模型被訓練用于重建原始觀察結(jié)果、預(yù)測獎勵,并預(yù)測下一個時間步的表示。直觀地說,世界模型根據(jù)它在文本中讀到的內(nèi)容,學習它應(yīng)該期望在世界中看到什么。
如下圖(右)所示,Dynalang 通過在壓縮的世界模型表示之上訓練策略網(wǎng)絡(luò)來選擇行動。它通過來自世界模型的想象的模擬結(jié)果進行訓練,并學會采取能夠最大化預(yù)測獎勵的行動。
與之前逐句或逐段消耗文本的多模態(tài)模型不同,研究者設(shè)計的 Dynalang 將視頻和文本作為一個統(tǒng)一的序列來建模,一次處理一幀圖像和一個文本 token。直觀來說,這類似于人類在現(xiàn)實世界中接收輸入的方式 —— 作為一個單一的多模態(tài)流,人需要時間來聆聽語言。將所有內(nèi)容建模為一個序列使得模型可以像語言模型一樣在文本數(shù)據(jù)上進行預(yù)訓練,并提高強化學習的性能。
HomeGrid 中的語言提示
研究者引入了 HomeGrid 來評估一個環(huán)境中的智能體。在這個環(huán)境中,智能體除了任務(wù)指令外還會收到語言提示。
HomeGrid 是一個具有指令和多樣化提示的具有挑戰(zhàn)性的視覺網(wǎng)格世界。HomeGrid 中的提示模擬了智能體可能從人類那里學到或從文本中獲取的知識,提供了對解決任務(wù)有幫助但不是必需的信息:
未來觀察:描述了智能體未來可能觀察到的情況,比如「盤子在廚房里」。
Correction:提供了基于智能體當前行為的交互式反饋,比如「轉(zhuǎn)身」。
Dynamics:描述了環(huán)境的動態(tài)變化,比如「踩踏板打開垃圾桶」。
Messenger 中的游戲手冊
研究者在 Messenger 游戲環(huán)境中進行評估,以測試智能體如何從更長、更復(fù)雜的文本中學習,這需要對文本和視覺觀察進行多次推理。智能體必須對描述每個任務(wù)動態(tài)的文本手冊進行推理,并將其與環(huán)境中實體的觀察結(jié)果結(jié)合起來,以確定哪些實體應(yīng)該接收消息,哪些應(yīng)該避免。Dynalang 的表現(xiàn)優(yōu)于 IMPALA、R2D2 以及使用專門架構(gòu)對文本和觀察進行推理的任務(wù)特定 EMMA 基線,特別是在最困難的第三階段。
?
?
?
?基于 LangRoom 的語言生成
就像語言可以影響智能體對將要看到的事物的預(yù)測一樣,智能體觀察到的內(nèi)容也會影響它對將要聽到的語言的期望(例如,關(guān)于它所看到的內(nèi)容的真實陳述)。通過在 LangRoom 中將語言輸出到動作空間,研究者展示了 Dynalang 可以生成與環(huán)境相關(guān)聯(lián)的語言,從而進行具身問答。LangRoom 是一個簡單的視覺網(wǎng)格世界,具有部分可觀察性,智能體需要在其中產(chǎn)生運動動作和語言。
研究者表示,盡管他們的工作專注于用于在世界中行動的語言理解,但它也可以像一個僅文本語言模型一樣從世界模型中生成文本。研究者在潛在空間中對預(yù)訓練的 TinyStories 模型進行模擬的抽樣,然后在每個時間步驟從表示中解碼 token 觀察。盡管生成的文本質(zhì)量仍然低于當前語言模型的水平,但模型生成的文本令人驚訝地連貫。他們認為將語言生成和行動統(tǒng)一在一個智能體架構(gòu)中是未來研究的一個令人興奮的方向。
原文標題:用語言建模世界:UC伯克利多模態(tài)世界模型利用語言預(yù)測未來
文章出處:【微信公眾號:智能感知與物聯(lián)網(wǎng)技術(shù)研究所】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2930文章
46151瀏覽量
391048
原文標題:用語言建模世界:UC伯克利多模態(tài)世界模型利用語言預(yù)測未來
文章出處:【微信號:tyutcsplab,微信公眾號:智能感知與物聯(lián)網(wǎng)技術(shù)研究所】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
自動駕駛中常提的世界模型是個啥?
對外部環(huán)境進行抽象和建模的技術(shù),讓自動駕駛系統(tǒng)在一個簡潔的內(nèi)部“縮影”里,對真實世界進行描述與預(yù)測,從而為感知、決策和規(guī)劃等關(guān)鍵環(huán)節(jié)提供有力支持。 什么是世界

世界模型:多模態(tài)融合+因果推理,解鎖AI認知邊界
電子發(fā)燒友網(wǎng)綜合報道 在人工智能的蓬勃發(fā)展進程中,世界模型正嶄露頭角,成為推動其邁向更高智能水平的關(guān)鍵力量。世界模型作為 AI 系統(tǒng)對外部世界
Matter 智能家居的通用語言
Matter由連接標準聯(lián)盟(CSA)創(chuàng)建,旨在解決智能家居的互操作性問題。Matter 基于簡單性、互操作性、可靠性和安全性四大核心原則 。
是采用基于 IP 應(yīng)用層的開源協(xié)議,本質(zhì)上是一種“通用語言
發(fā)表于 05-19 15:35
商湯“日日新”融合大模型登頂大語言與多模態(tài)雙榜單
據(jù)弗若斯特沙利文(Frost & Sullivan, 簡稱“沙利文”)聯(lián)合頭豹研究院發(fā)布的《2025年中國大模型年度評測》結(jié)果顯示:在語言和多模態(tài)核心能力測評中,商湯“日日新”融合大模型
?VLM(視覺語言模型)?詳細解析
視覺語言模型(Visual Language Model, VLM)是一種結(jié)合視覺(圖像/視頻)和語言(文本)處理能力的多模態(tài)人工智能模型,
FPGA+AI王炸組合如何重塑未來世界:看看DeepSeek東方神秘力量如何預(yù)測......
”“大模型圈的大黑馬”“硅谷震驚了”“來自中國的學霸級AI”……
從智能手機到自動駕駛,從數(shù)據(jù)中心到物聯(lián)網(wǎng),F(xiàn)PGA 正悄然改變著我們的生活。未來,F(xiàn)PGA 又將如何塑造世界?DeepSeek 帶你一起
發(fā)表于 03-03 11:21

大語言模型開發(fā)框架是什么
大語言模型開發(fā)框架是指用于訓練、推理和部署大型語言模型的軟件工具和庫。下面,AI部落小編為您介紹大語言模
大語言模型開發(fā)語言是什么
在人工智能領(lǐng)域,大語言模型(Large Language Models, LLMs)背后,離不開高效的開發(fā)語言和工具的支持。下面,AI部落小編為您介紹大語言
一文理解多模態(tài)大語言模型——下
/understanding-multimodal-llms ? 《一文理解多模態(tài)大語言模型 - 上》介紹了什么是多模態(tài)大語言
一文理解多模態(tài)大語言模型——上
/understanding-multimodal-llms 在過去幾個月中, OpenVINO? 架構(gòu)師 Yury閱讀了眾多有關(guān)多模態(tài)大語言模型的論文和博客,在此基礎(chǔ)上,推薦了一篇解讀多模態(tài)
【《大語言模型應(yīng)用指南》閱讀體驗】+ 基礎(chǔ)知識學習
的表達方式和生成能力。通過預(yù)測文本中缺失的部分或下一個詞,模型逐漸掌握語言的規(guī)律和特征。
常用的模型結(jié)構(gòu)
Transformer架構(gòu):大語言
發(fā)表于 08-02 11:03
【《大語言模型應(yīng)用指南》閱讀體驗】+ 俯瞰全書
的機會!
本人曾經(jīng)也參與過語音識別產(chǎn)品的開發(fā),包括在線和離線識別,但僅是應(yīng)用語言模型實現(xiàn)端側(cè)的應(yīng)用開發(fā),相當于調(diào)用模型的接口函數(shù),實際對模型的設(shè)計、訓練和運行機理并不了解,我想通過學習
發(fā)表于 07-21 13:35
基于神經(jīng)網(wǎng)絡(luò)的語言模型有哪些
文本或預(yù)測文本中的下一個詞。隨著深度學習技術(shù)的飛速發(fā)展,涌現(xiàn)出了多種不同類型的神經(jīng)網(wǎng)絡(luò)語言模型。以下將詳細介紹幾種主流的基于神經(jīng)網(wǎng)絡(luò)的語言模型





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論