") 2023年電賽E題國獎開源分享
2023年電賽E題國獎開源分享

2023年電賽E題 國獎
運動目標控制與自動追蹤系統(tǒng)
團隊介紹
獎 項:全國二等獎
學 校:重慶科技學院
作 者:陳杭 石登云 茍洪嘉
題目要求
一、任務
設計制作一個運動目標控制與自動追蹤系統(tǒng)。系統(tǒng)包括:
1、模擬目標運動的紅色光斑位置控制系統(tǒng)。
2、指示自動追蹤的綠色光斑位置控制系統(tǒng)。
系統(tǒng)結構示意及擺放位置見圖 1(a)。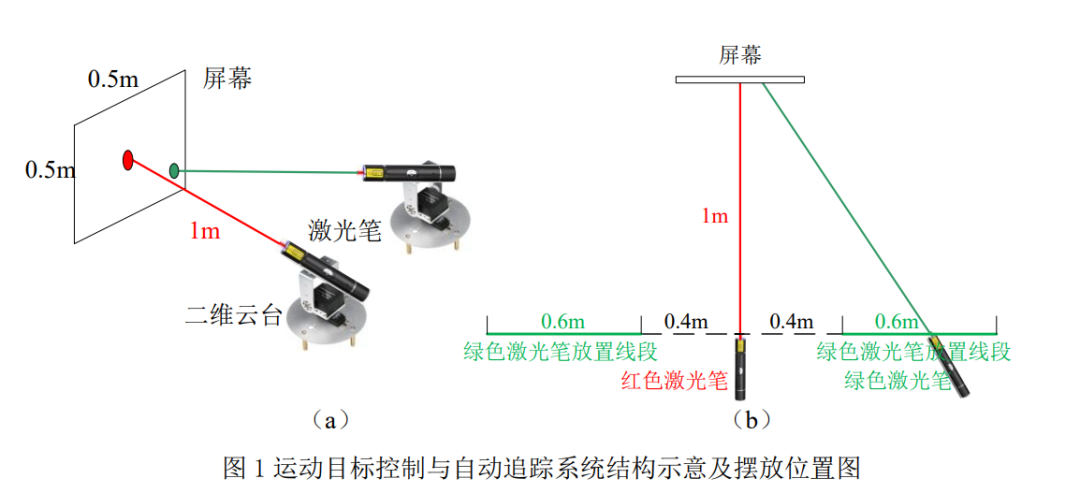
圖中兩個激光筆固定在各自獨立的二維電控云臺上。
紅色激光筆發(fā)射的光斑用來模擬運動目標。光斑落在正前方距離 1m 處的白色屏幕上,光斑直徑≤1cm。紅色光斑位置控制系統(tǒng)控制光斑能在屏幕范圍內任意移動。
綠色激光筆發(fā)射的光斑由綠色光斑位置系統(tǒng)控制,用于自動追蹤屏幕上的紅色光斑,指示目標的自動追蹤效果,光斑直徑≤1cm。
綠色激光筆放置線段如圖 1(b)所示。
該線段與屏幕平行,位于紅色激光筆兩側,距紅色激光筆距離大于 0.4m、小于 1m。
綠色激光筆在兩個放置線段上任意放置。
屏幕為白色,有效面積大于 0.6╳0.6m2。
用鉛筆在屏幕中心畫出一個邊長0.5m的正方形,標識屏幕的邊線;所畫的正方形的中心為原點,用鉛筆畫出原點位置,所用鉛筆痕跡寬≤1mm。
二、要求
1、設置運動目標位置復位功能。執(zhí)行此功能,紅色光斑能從屏幕任意位置回到原點。光斑中心距原點誤差≤2cm。
2、啟動運動目標控制系統(tǒng)。紅色光斑能在 30 秒內沿屏幕四周邊線順時針移動一周,移動時光斑中心距邊線距離≤2cm。
3、用約1.8cm寬的黑色電工膠帶沿A4紙四邊貼一個長方形,構成A4靶紙。將此A4靶紙貼在屏幕自定的位置。啟動運動目標控制系統(tǒng),紅色光斑能在30秒內沿膠帶順時針移動一周。超時不得分,光斑完全脫離膠帶一次扣2分,連續(xù)脫離膠帶移動5cm以上記為0分。
4、將上述 A4 靶紙以任意旋轉角度貼在屏幕任意位置。啟動運動目標控制系統(tǒng),要求同(3)。
設計要求
一、運動目標控制理論
在運動控制系統(tǒng)中,基于OpenMV識別目標點及軌跡并傳送坐標數(shù)據(jù)給MCU,由主控MCU調整PWM輸出占空比實現(xiàn)對舵機運動參數(shù)的調整,從而控制云臺轉動實現(xiàn)對運動目標的復位、軌跡移動、循跡等功能。首先,將OpenMV固定在合適位置以觀測到完整的目標屏幕,利用OpenMV識別紅色激光返回的坐標點(以下簡稱紅斑),將激光筆依次在屏幕上移動。基于基礎題2要求,用激光筆在屏幕鉛筆畫的邊線上標記8個坐標點(擁有四個頂點,每兩個頂點之間各取一個中點),分別按下按鍵記錄坐標在MCU中,最后控制二維云臺依次將記錄的每一個點都走一遍。(運動目標控制皆使用記錄坐標構建坐標系的方法)
對于運動控制系統(tǒng)的循跡功能(基礎題目3,4),需要通過OpenMV完成對黑色A4紙邊框的識別以確定矩形頂點坐標,利用頂點坐標分別計算出矩形四條邊框斜率,基于頂點及邊框斜率計算得到每條邊框上的20個標記點(經(jīng)過測試,20個標記點效果較為理想)。最后識別紅斑坐標,控制二維云臺依次沿標記點完成移動,即可實現(xiàn)對黑色矩形的循跡功能。
二、自動追蹤系統(tǒng)方法
在自動追蹤系統(tǒng)中,OpenMV需要完成對紅斑以及綠色激光筆的識別(以下簡稱綠斑),因此需要單獨將OpenMV固定在二維云臺旁邊,不隨云臺移動。OpenMV將識別d的坐標數(shù)據(jù)通過串口返回到主控端,系統(tǒng)中對紅斑和綠斑設定有不同的幀頭幀尾防止誤判,主控接收到坐標數(shù)據(jù)之后再分別對它們的橫縱坐標值相減以獲取兩運動目標的相對距離。根據(jù)兩坐標差值的正負,可獲知兩光斑的相對坐標位置。這時只需要利用紅色和綠色X、Y軸的差值,最后控制二維云臺的x,y軸增加或者減小角度即可。
在測試過程中,發(fā)現(xiàn)PWM舵機偶爾莫名抖動,分析這是由于坐標數(shù)據(jù)存在噪聲導致。因此,本項目中采用采用卡爾曼濾波對OpenMV傳送的坐標數(shù)據(jù)進行對其濾波,具體公式如下:
從而讓OpenMV反饋回來的坐標與驅動MG995舵機變得更加穩(wěn)定,能夠完成設計要求。
A:狀態(tài)轉移矩陣
X(k-1):k-1時刻 狀態(tài)最優(yōu)估計值 B:控制輸入矩陣
U(k):k時刻 狀態(tài)輸入控制量
W(k):k時刻 卡爾曼增益
設計圖
運動控制系統(tǒng)硬件原理圖
自動追蹤系統(tǒng)硬件原理圖
控制程序流程圖
自動跟蹤系統(tǒng)主流程圖
自動跟蹤系統(tǒng)串口流程
自動跟蹤系統(tǒng)OpenMV流程圖
獲獎團隊參賽心得與經(jīng)驗分享
編者以(以下為參賽團隊自述)2023年第十六屆全國大學生電子設計競賽為例,簡單概述所指導團隊參賽過程及注意事項,以供讀者參考。
正式比賽前一天,應提醒參賽隊員合理分配時間,保證充足的休息時間以具備良好體力,以應對接下來四天三夜高強度工作的挑戰(zhàn)。
第一天
比賽賽題一般會在比賽第一天早上公布,在此之后,參賽團隊與指導老師充分討論各題型關鍵技術及可能出現(xiàn)的問題。迅速確定最終選題,并做好隊員之間的任務分工,以保證人力資源得到充分利用。
比賽初期,對題目進行詳細分析,確定設計方案及技術難點,統(tǒng)計所需元件清單,做好元器件及耗材的選型及補充購置工作。其中,較為關鍵的環(huán)節(jié)是方案設計階段,一套有效、良好的技術方案能夠規(guī)避大多數(shù)可能出現(xiàn)的技術問題。因此,比賽第一天不必急于動手,隊員之間可充分討論商討,盡量確定一套前期資源充足的、符合隊伍實力的、較為合理的解決方案。
第二天
根據(jù)所確定的技術方案,對材料進行整理,并利用已經(jīng)具備的硬件資源,設計出基本模型。以本案例設計團隊為例,由于在前期準備中,參賽隊員針對CW32F030芯片作了大量的訓練,積累了較多的實戰(zhàn)經(jīng)驗。因此,在此次比賽中迅速確定了將CW32F030芯片作為主控MCU。另外,結合硬件資源及開發(fā)難易程度,確定使用OpenMV為視覺識別模塊,以MG995舵機搭建二維簡易云臺搭載激光筆。
第三天
確立好硬件部分的材料以及場地的簡易搭建,整理好所有思路,本小組開始全力攻克賽題。在前兩天中也在嘗試做本題,但也只是順著題目做了雛形,勾勒大概題目要求,精度尚與賽題要求有一段距離。本小組也逐漸進入狀態(tài),不斷提高精度并嘗試脫機調試,同時整理資料進行撰寫報告與測試方案。
第四天
整理所有的資料以及代碼,作品開始準備完全脫機操作,報告實時跟進作品進度。完全脫機調試后,使用測試方案進行調試,最后更改場地的位置和光線的強弱進行脫機操作調試,作品很好的完成所選賽題要求,完成報告撰寫后,整理個人資料,作品封箱。
經(jīng)歷
我們在過程中遇到的最大問題是在脫機操作上,剛開始本小組利用固定坐標方式做E題賽題的運動控制系統(tǒng),讓舵機云臺采集每一個固定坐標,讓舵機云臺按照邏輯進行行動,從而滿足賽題要求,但在這個過程中舵機云臺的有一點移動,它所變現(xiàn)的坐標與之前表現(xiàn)的坐標相差甚遠,對位置的要求極高,另一個場地顯然不可能百分百復刻。小組便開始嘗試更改思維,先更改到利用算法處理舵機云臺反饋的坐標點,但始終達不到滿意的精度效果。后面小組決定在源頭改變,不再利用舵機云臺反饋坐標,利用open MV進行坐標定位并通過MCU記住坐標,這樣可以跳出固定思維,可以讓作品在更改場地的情況下隨時確定坐標參數(shù),再讓舵機云臺按照邏輯進行行動,從而滿足賽題要求。最后,本團隊配合默契,斬獲2023ti杯國家二等獎。
審核編輯 黃宇
-
控制系統(tǒng)
+關注
關注
41文章
6774瀏覽量
111988 -
開源
+關注
關注
3文章
3653瀏覽量
43702 -
CW32
+關注
關注
1文章
255瀏覽量
1190
發(fā)布評論請先 登錄
晟矽微電榮獲2025年GAS消費電子科創(chuàng)獎產(chǎn)品創(chuàng)新獎
德賽西威榮獲長安汽車2024年度“戰(zhàn)略生態(tài)獎”
deepin榮獲2024年度開源社區(qū)獎
電裝榮獲2024年度扶輪獎“可持續(xù)發(fā)展標桿獎”
德賽西威榮獲高工金球獎“年度量產(chǎn)首創(chuàng)獎”
再獲殊榮!普賽斯儀表榮獲2024年國產(chǎn)測試測量行業(yè)卓越獎

江波龍榮獲2023年度廣東省科學技術獎
CET中電技術獲2024年“數(shù)據(jù)要素×”大賽寧夏分賽水利應用賽道三等獎

賽卓電子榮獲2024金輯獎——最佳技術實踐應用獎
東方風電榮獲2023年度國家科學技術進步獎一等獎
Marvell榮獲通用汽車2023年Overdrive獎
授人以漁,24電賽H題完賽資料開源,思想開源-(2)軟件講解
請問繼電器連接需要注意什么?
思爾芯賽題正式發(fā)布,邀你共戰(zhàn)EDA精英挑戰(zhàn)賽!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論