") 基于PID的Buck與Boost閉環(huán)仿真
基于PID的Buck與Boost閉環(huán)仿真

Buck的模型是一個(gè)雙閉環(huán)輸出15V的模型,頻率60Khz,由給定輸出電壓目標(biāo)進(jìn)行誤差計(jì)算送入PID的電壓環(huán)、再對(duì)電感電流進(jìn)行誤差計(jì)算,送入PID的電流環(huán)以生成PWM的雙閉環(huán)拓?fù)浣M成,這里就不說(shuō)明具體的參數(shù)計(jì)算了;
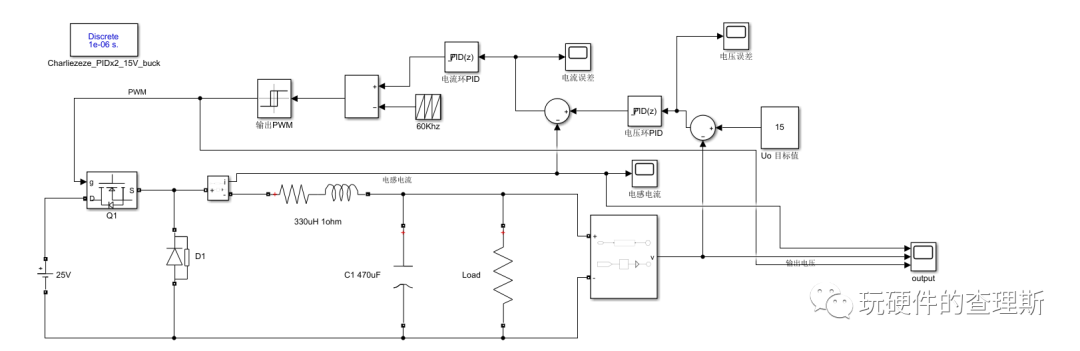
仿真波形如下,閉環(huán)達(dá)到穩(wěn)態(tài)值的時(shí)間在4ms左右,紋波控制在2%,當(dāng)然模型比較理想,僅具有參考價(jià)值;

Boost模型同理,也是一個(gè)雙閉環(huán)輸出15V的模型,頻率10Khz,由給定輸出電壓目標(biāo)進(jìn)行誤差計(jì)算送入PID的電壓環(huán)、再對(duì)電感電流進(jìn)行誤差計(jì)算送入PID的電流環(huán)生成PWM的拓?fù)浣M成;
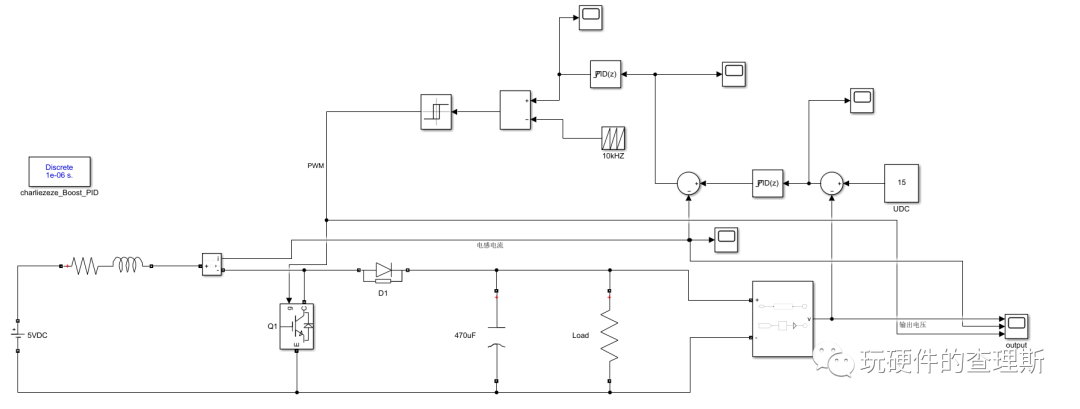
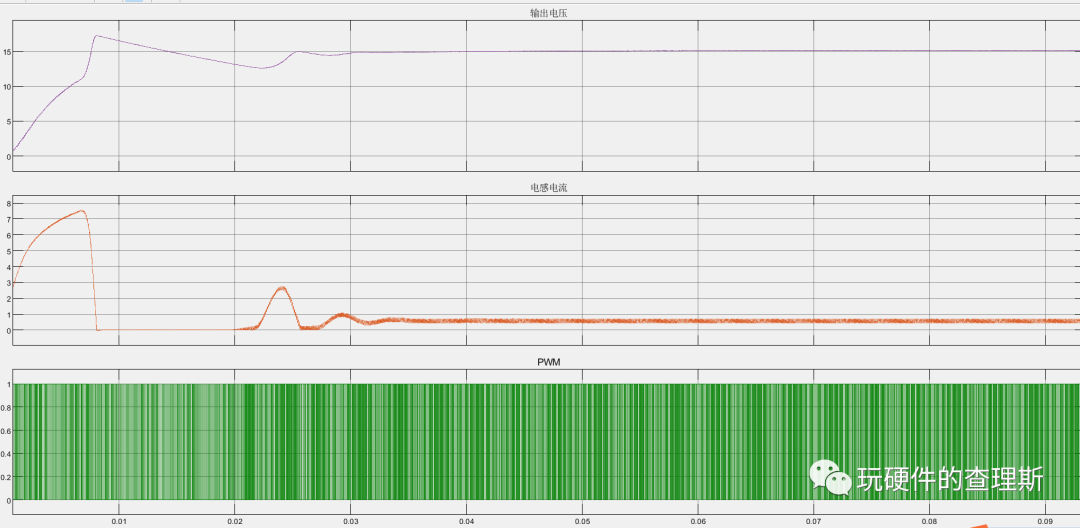
仿真波形如下,閉環(huán)達(dá)到穩(wěn)態(tài)值的時(shí)間在3ms左右,紋波控制在1mV以?xún)?nèi),當(dāng)然模型比較理想,僅具有參考價(jià)值;
以上兩個(gè)模型也只是練習(xí)隨手而搭,并沒(méi)有經(jīng)過(guò)嚴(yán)謹(jǐn)?shù)挠?jì)算和考量,在此分享出來(lái)給大家提供參考,當(dāng)然有什么不足之處還請(qǐng)指出,亦或者討論一下各自的見(jiàn)解,大家一起提升。
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀(guān)點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
仿真器
+關(guān)注
關(guān)注
14文章
1036瀏覽量
85250 -
輸出電壓
+關(guān)注
關(guān)注
2文章
1636瀏覽量
39235 -
PID控制
+關(guān)注
關(guān)注
10文章
461瀏覽量
41177 -
boost電路
+關(guān)注
關(guān)注
3文章
164瀏覽量
30889 -
電感電流
+關(guān)注
關(guān)注
0文章
88瀏覽量
11284
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
詳解Buck、Boost、Buck-Boost拓?fù)潆娐?/a>
DC-DC開(kāi)關(guān)穩(wěn)壓器主要有三種拓?fù)浞绞剑航祲海?b class='flag-5'>Buck)、升壓(Boost)、降壓-升壓(Buck-Boost)。
發(fā)表于 06-29 09:17
?4.3w次閱讀
做開(kāi)關(guān)變換器的仿真時(shí),如何將buck和boost級(jí)聯(lián)起來(lái)?
做開(kāi)關(guān)變換器的仿真時(shí),如何將buck和boost級(jí)聯(lián)起來(lái)?
發(fā)表于 02-14 08:24
求BUCK-BOOST型開(kāi)關(guān)電源型號(hào)
RT 大四學(xué)生 剛分了個(gè)開(kāi)關(guān)電源的課題,指導(dǎo)老師讓找一個(gè)屬于BUCK-BOOST型的開(kāi)關(guān)電源,然后對(duì)其負(fù)載特性仿真分析。由于以前沒(méi)有接觸過(guò),先從頭開(kāi)始學(xué)起,求大神們告訴幾個(gè)常用的屬于BUCK-BOOST型的開(kāi)關(guān)電源型號(hào),感激不盡
發(fā)表于 01-27 20:50
buck電路的諧波比buck-boost大是什么原因?
做測(cè)試時(shí)看到一個(gè)電路 想起一個(gè)問(wèn)題 這個(gè)參數(shù)用buck可以做,buck-boost也可以做不過(guò)工程師選用的是buck-boost然后我就為什么選buck-boost他說(shuō)
發(fā)表于 01-08 14:04
基于PSIM的電壓型BUCK仿真
本篇文章介紹一個(gè)開(kāi)關(guān)電源里面最簡(jiǎn)單的拓?fù)?b class='flag-5'>BUCK的仿真,基于PSIM軟件,非常便于初學(xué)者進(jìn)行學(xué)習(xí)。大概講一下電壓型BUCK的工作原理,首先分壓電阻對(duì)輸出電壓進(jìn)行采樣,經(jīng)過(guò)PID得到誤差
發(fā)表于 07-25 14:11
如何使用334控制兩路Buck-Boost
最近接手了一個(gè),目前我想用334控制兩路電流型Buck-Boost,另外還需要向上位機(jī)反饋信息,頻率做到100kHz,每個(gè)周期內(nèi)執(zhí)行PID計(jì)算,請(qǐng)問(wèn)它的速度能不能達(dá)到要求?
發(fā)表于 03-05 09:52
什么是Boost―Buck電路?如何對(duì)Boost―Buck電路進(jìn)行仿真?
Simulink建立了Buck電路的仿真模型,在此基礎(chǔ)上對(duì)Buck電路及Boost―Buck電路進(jìn)行了較詳細(xì)的
發(fā)表于 07-08 07:21
Boost和Buck電路的相關(guān)資料分享
文章目錄前言一、Boost和Buck電路二、實(shí)際使用1.DC-DC芯片2.DC-DC芯片產(chǎn)生負(fù)電壓前言在設(shè)計(jì)電源電路時(shí)經(jīng)常會(huì)用到升壓降壓和負(fù)電壓等電路,博主結(jié)合理論知識(shí)和實(shí)際應(yīng)用加上自己理解
發(fā)表于 11-17 06:32
用Boost與Buck-Boost實(shí)現(xiàn)LED驅(qū)動(dòng)
用Boost與Buck-Boost實(shí)現(xiàn)LED驅(qū)動(dòng)
不管我們是否要控制輸出電壓或輸出電流,Boost調(diào)節(jié)器都要比Buck調(diào)節(jié)器更難設(shè)計(jì)。持續(xù)導(dǎo)通狀態(tài)(CCM)
發(fā)表于 04-21 10:41
?2941次閱讀
DCM_Buck_Boost變換器的建模與控制設(shè)計(jì)講解
直流變換器一般具有非線(xiàn)性、多模態(tài)等特點(diǎn)。Buck-Boost變換器的建模是其閉環(huán)控制設(shè)計(jì)的關(guān)鍵,對(duì)于Buck-Boost變換器輸出可靠的電壓和良好的動(dòng)態(tài)響應(yīng)特性具有非常重要的影響。本文是在
發(fā)表于 01-04 15:10
?67次下載
閉環(huán)PID直流穩(wěn)壓仿真與控制一體化設(shè)計(jì)
閉環(huán)PID直流穩(wěn)壓仿真與控制一體化設(shè)計(jì)(第十一屆亞洲電源技術(shù)論壇)-文檔為閉環(huán)PID直流穩(wěn)壓仿真
發(fā)表于 09-17 15:28
?3次下載

雙向buck-boost電路工作原理
雙向buck-boost電路是一種特殊的電源轉(zhuǎn)換器,它可以根據(jù)輸入電壓的高低來(lái)自動(dòng)調(diào)整輸出電壓的大小,從而實(shí)現(xiàn)電源的升降壓功能。本文將詳細(xì)介紹雙向buck-boost電路的工作原理及其應(yīng)用。 一





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論