") 仿真系統(tǒng)軟件的架構是什么
仿真系統(tǒng)軟件的架構是什么

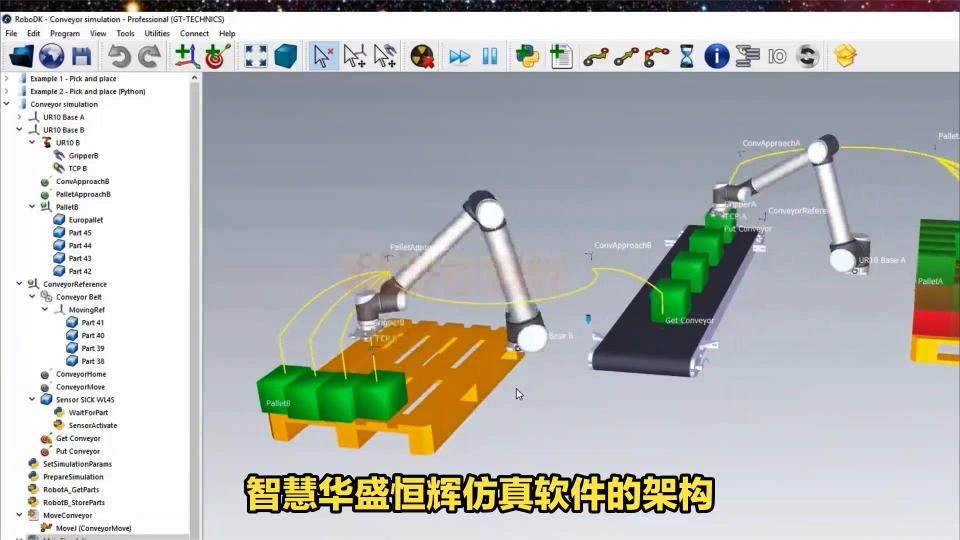
仿真軟件的架構可以包括以下幾個部分:
硬件驅動部分:負責驅動硬件,向上一層提供底層硬件的操作接口。仿真系統(tǒng)通過硬件驅動為嵌入式軟件提供相應的通信接口,用于嵌入式軟件和仿真系統(tǒng)之間的數(shù)據(jù)交換。
仿真模型部分:這是仿真軟件的核心,它可以包括系統(tǒng)動力學模型、硬件在環(huán)模型等多種類型。這些模型描述了系統(tǒng)在不同條件下的行為和表現(xiàn),例如系統(tǒng)的動態(tài)特性、熱力學特性等等。
人機交互部分:仿真軟件需要提供可視化界面,方便用戶進行仿真實驗的設置、執(zhí)行和結果查看。人機交互部分應具備友好的圖形界面,使用戶能夠方便地進行模型的建立、修改和刪除等操作。
數(shù)據(jù)處理部分:仿真軟件需要對數(shù)據(jù)進行處理和分析,例如對仿真結果進行數(shù)據(jù)處理、數(shù)據(jù)存儲和數(shù)據(jù)可視化等操作。
控制部分:仿真軟件需要有控制部分,控制部分的架構可以影響仿真的精度和速度。控制部分的架構應該具備穩(wěn)定性、可靠性和靈活性等特性。
網(wǎng)絡通信部分:仿真軟件還需要具備網(wǎng)絡通信功能,通過網(wǎng)絡通信可以實現(xiàn)對仿真實驗的遠程控制和數(shù)據(jù)傳輸?shù)裙δ堋?/p>
以上是仿真軟件的一般架構,不同的仿真軟件可能會有一些差異。同時,仿真軟件的設計和實現(xiàn)也需要考慮易用性、可擴展性、可維護性等多種因素。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
架構
+關注
關注
1文章
528瀏覽量
25950 -
仿真系統(tǒng)
+關注
關注
1文章
104瀏覽量
21175
發(fā)布評論請先 登錄
相關推薦
熱點推薦


電磁軌跡預測分析系統(tǒng)軟件全面解析
電磁軌跡預測分析系統(tǒng)軟件:深度解析 系統(tǒng)概述 北京華盛恒輝電磁軌跡預測分析系統(tǒng)軟件,借助電磁學原理和先進計算技術,能實時預測與分析帶電粒子或電磁設備在電磁場中的運動軌跡。該系統(tǒng)通過搭建
基于衛(wèi)星圖像的智能定位系統(tǒng)軟件
基于衛(wèi)星圖像的智能定位系統(tǒng)軟件是衛(wèi)星導航、圖像處理與智能算法融合的前沿技術結晶,在高精度定位領域具有卓越表現(xiàn)。以下是對這類軟件的詳細介紹: 應用案例 目前,已有多個基于衛(wèi)星圖像的智能定位系統(tǒng)在實際
AN135-為LTC3880實施強大的PMBus系統(tǒng)軟件
電子發(fā)燒友網(wǎng)站提供《AN135-為LTC3880實施強大的PMBus系統(tǒng)軟件.pdf》資料免費下載
發(fā)表于 01-12 09:57
?0次下載

電磁兼容系統(tǒng)軟件(EMC系統(tǒng))
智慧華盛恒輝電磁兼容系統(tǒng)軟件 一、基本概念 軟件開發(fā)可以來這里,這個首肌開始是幺烏扒,中間是幺幺叁叁,最后一個是泗柒泗泗,按照你的順序組合可以找到。 華盛恒輝科技有限公司:是一家專注于高端軟件定制
WDS分布式存儲系統(tǒng)軟件助力電信工程海量數(shù)據(jù)存儲項目
WDS分布式存儲系統(tǒng)軟件助力電信工程海量數(shù)據(jù)存儲項目

選擇PoE PSE系統(tǒng)軟件解決方案
電子發(fā)燒友網(wǎng)站提供《選擇PoE PSE系統(tǒng)軟件解決方案.pdf》資料免費下載
發(fā)表于 09-24 09:13
?1次下載





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論