 ROS中Message隊列介紹
ROS中Message隊列介紹

Message中的隊列
在ROS中有一些復雜的消息中可以包含其他的消息,并形成消息數組。
例如在exampleHelperROSCreateSampleNetwork例子中,變量tf包含一個消息,這個消息的主要作用是坐標轉換的tf/tfMessage類型。通過輸入tf我們可以看到
tf
tf = struct with fields:
MessageType: ‘tf/tfMessage’
Transforms: [1x53 struct]
tf有兩個字段:MessageType包含一個標準數據數組,而Transforms包含一個對象數組。
在Transforms中存儲了53條消息,它們都具有相同的結構。在Transforms中展開tf以查看結構:
tf.Transforms
ans=1×53 struct array with fields:
MessageType
Header
ChildFrameId
Transform
Transforms中的每個對象都有四個屬性。
您可以展開以查看Transforms的Transform字段。下面的命令會返回53個單獨的輸出,因為每個對象都被求值并返回其Transform字段的值
% tformFields = tf.Transforms.Transform
cellTransforms = {tf.Transforms.Transform}
這將把所有53個對象條目放在一個單元格數組中,這樣就可以通過訪問標準的MATLAB向量的方式來訪問數組元素:
tf.Transforms(5)
ans = struct with fields:
MessageType: ‘geometry_msgs/TransformStamped’
Header: [1x1 struct]
ChildFrameId: ‘/imu_link’
Transform: [1x1 struct]
訪問53個變換列表中第五個變換的信息:
tf.Transforms(5).Transform.Translation
ans = struct with fields:
MessageType: ‘geometry_msgs/Vector3’
X: 0.0599
Y: 0
Z: -0.0141
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
matlab
+關注
關注
189文章
3000瀏覽量
233835 -
數組
+關注
關注
1文章
419瀏覽量
26494 -
ROS
+關注
關注
1文章
287瀏覽量
17693
發布評論請先 登錄
相關推薦
熱點推薦
Linux下進程通訊消息隊列
?MQ(message queue),從字面意思上看,本質是個隊列,FIFO 先入先出,只不過隊列中存放的內容是message 而已。MQ
系統鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發環境嗎?
請問一下,百度文庫資料里面,下圖所示的系統鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發環境嗎?與前面4GB版本的鏡像有什么區別?
發表于 03-01 23:06
消息隊列經典十連問
我們通常說的消息隊列,簡稱MQ(Message Queue),它其實就指消息中間件,當前業界比較流行的開源消息中間件包括:RabbitMQ、RocketMQ、Kafka。
SystemVerilog中的隊列
隊列是大小可變的有序集合,隊列中元素必須是同一個類型的。隊列支持對其所有元素的訪問以及在隊列的開始或結束處插入和刪除。
ROS基本介紹
近來找到的實習主要是做智能車控制,用到的也就是ROS機器人操作系統,ROS需要運行在一個操作系統上,這個操作系統常用的就是Linux,而公司用的就是Ubuntu,所以Ubuntu-ROS組合就是實習的主要學習內容了。所以我就新開

ROS機器人操作系統的實現原理(上)
本文介紹ROS機器人操作系統(Robot Operating System)的實現原理,從最底層分析ROS代碼是如何實現的。
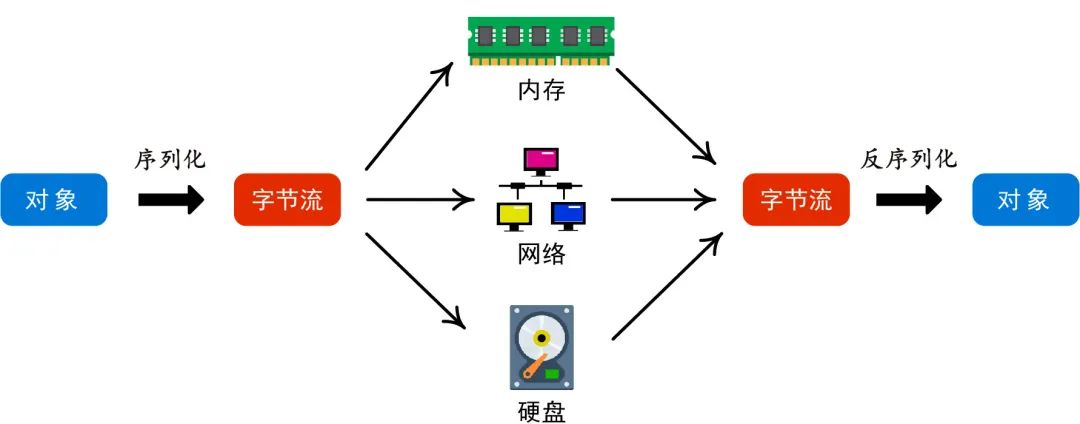
**1、序列化**
把通信的內容(也就是消息messa
ROS機器人操作系統的實現原理(下)
本文介紹ROS機器人操作系統(Robot Operating System)的實現原理,從最底層分析ROS代碼是如何實現的。
**1、序列化**
把通信的內容(也就是消息messa
FreeRTOS消息隊列介紹
隊列是為了任務與任務、任務與中斷之間的通信而準備的,可以在任務與任務、任務與中斷之間傳遞消息,隊列中可以存儲有限的、大小固定的數據項目。任務與任務、任務與中斷之間要交流的數據保存在隊列
ROS中XMLRPC是什么
XMLRPC是什么? 關于ROS節點建立連接的技術細節,官方文檔說的非常簡單,在這里ROS Technical Overview。沒有基礎的同學看這個介紹必然還是不懂。 在ROS
如何在Matlab中自定義Message
自定義Message 當我們的 message 消息比較復雜時,通常要用到自定義的 message 消息,MATLAB 2020b以上的版本自帶了ROS Toolbox Interfa
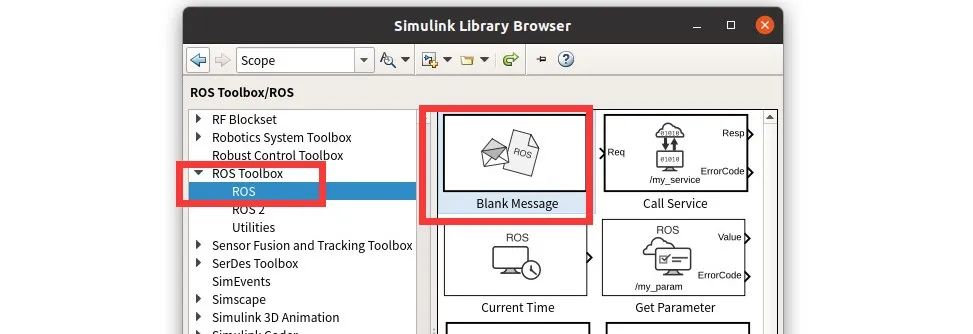
Matlab中創建一個Message方法
創建一個空白ROS消息,并用機器人路徑的X和Y位置填充它。然后將更新后的ROS消息發布到ROS網絡。 簡單介紹一下Blank Message
Unity與ROS鏈接介紹
對于ROS而言,其最常用的就是Topic話題以及Service兩個了。之前我們在了解Unity Robotics Hub時候就了解到基本的Unity和ROS的通訊,下面我們來詳細介紹一下Unity

ROS核心框架介紹
message_filter),有些應該是通過socket。 不過ROS的核心框架也就是ros-base主要由Willow Garage公司和一些開發者設計、提供以及維護,它提供了一些分布式計算的基本工具

ROS2中自帶例程測試
如果你是一個ROS2的開發者,可能對剛才我們使用的ROS2命令比較熟悉,這時你可能也會產生一個問題:我們之前也安裝了ROS2系統,那ROS2的原生功能還可以正常運行么? 我們再來試一試

JavaWeb消息隊列使用指南
在現代的JavaWeb應用中,消息隊列(Message Queue)是一種常見的技術,用于異步處理任務、解耦系統組件、提高系統性能和可靠性。 1. 消息隊列的基本概念 消息





 工商網監
工商網監
評論