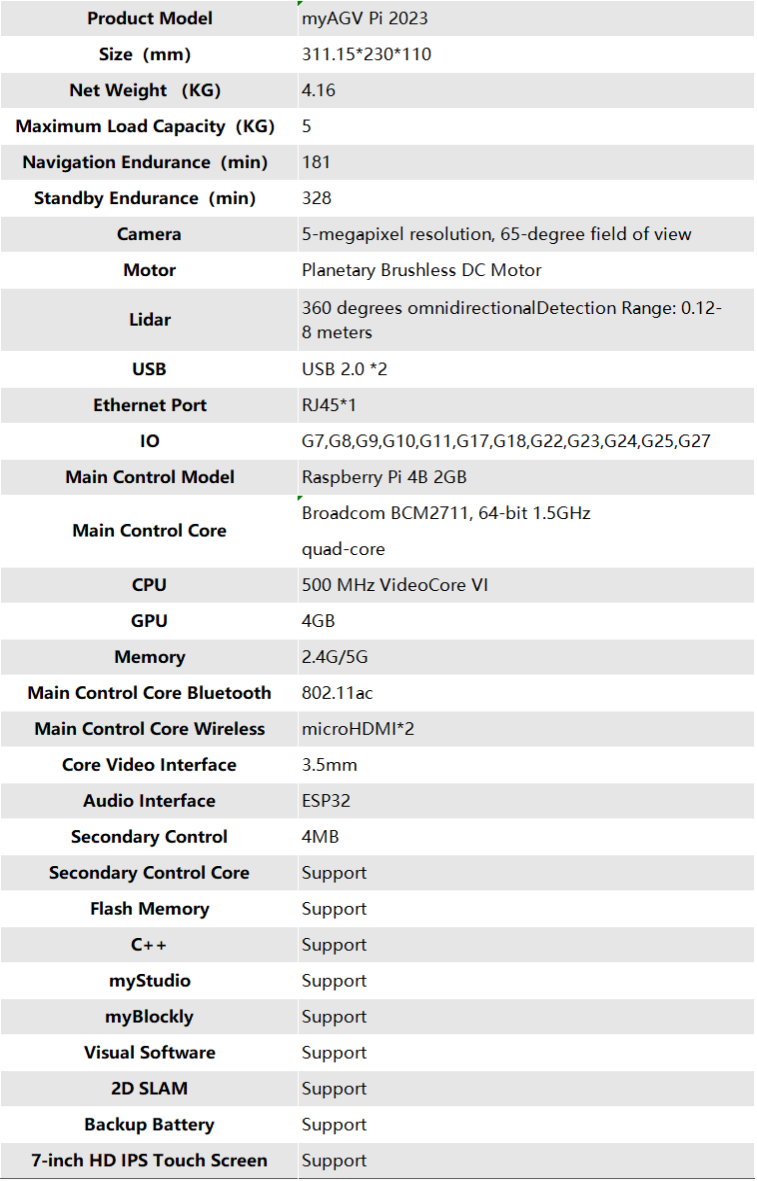
") myAGV 2023 Pi 全新升級(jí)!
myAGV 2023 Pi 全新升級(jí)!

Introduction
在高速發(fā)展的自動(dòng)化和機(jī)器人技術(shù)領(lǐng)域,我們的公司一直致力于提供高效、靈活且可靠的輕量級(jí)機(jī)械臂解決方案。然而,我們也深知,傳統(tǒng)的機(jī)械臂需要固定在一個(gè)地方,這在一定程度上限制了其在空間上的應(yīng)用范圍。為了突破這一限制,我們推出了全新的移動(dòng)地盤產(chǎn)品—myAGV。
myAGV是一款以樹莓派4b為主控的AGV,它可以搭載我們公司的輕量級(jí)機(jī)械臂,將兩者組裝成一個(gè)復(fù)合機(jī)器人。這不僅大大擴(kuò)展了機(jī)械臂的應(yīng)用范圍,也讓其在空間上的移動(dòng)變得更為靈活自由。

此外,myAGV還搭載了一顆360度全面雷達(dá)和麥克納姆輪全向輪胎,使其具有更強(qiáng)的環(huán)境感知和移動(dòng)能力。同時(shí),myAGV支持ROS1平臺(tái)的開發(fā),能夠?qū)崿F(xiàn)建圖、導(dǎo)航、避障等功能,為用戶提供更全面、更高效的解決方案。
接下來(lái)的部分,我們將詳細(xì)介紹myAGV的新迭代和升級(jí),以及這些改變?nèi)绾螏椭脩舾玫貞?yīng)對(duì)各種應(yīng)用場(chǎng)景的挑戰(zhàn)。
Background of Product Iteration and Upgrade
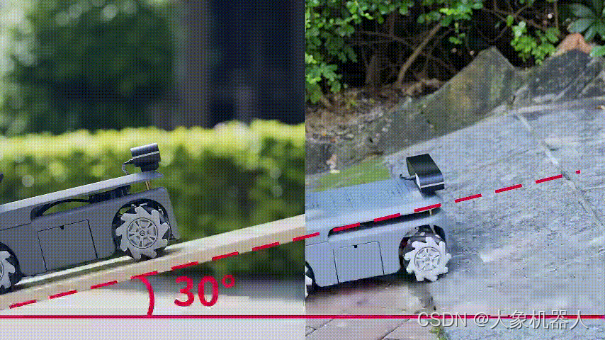
自myAGV產(chǎn)品推出以來(lái),我們不斷收集和分析用戶反饋,以及監(jiān)控市場(chǎng)需求和技術(shù)進(jìn)展。我們發(fā)現(xiàn),在某些復(fù)雜地形上,myAGV的性能表現(xiàn)存在一定的偏差,這主要是由于當(dāng)前的導(dǎo)航算法和結(jié)構(gòu)設(shè)計(jì)限制所致。此外,我們還注意到,在動(dòng)態(tài)避障方面,myAGV的反應(yīng)靈敏度有待提高,這些問(wèn)題反映了潛在的算法和結(jié)構(gòu)設(shè)計(jì)不足。
為了解決這些問(wèn)題,并提高myAGV的整體性能和用戶體驗(yàn),我們決定進(jìn)行產(chǎn)品的迭代升級(jí)。這一升級(jí)不僅針對(duì)現(xiàn)有問(wèn)題,也致力于引入最新技術(shù),以適應(yīng)不斷變化的市場(chǎng)需求。其中,3D攝像頭技術(shù)的進(jìn)步為我們提供了新的解決方案。通過(guò)集成先進(jìn)的3D攝像頭,我們可以大幅提升myAGV的導(dǎo)航精準(zhǔn)度和環(huán)境適應(yīng)能力,尤其是在復(fù)雜和動(dòng)態(tài)的環(huán)境中。這次迭代升級(jí)是對(duì)產(chǎn)品未來(lái)規(guī)劃的重要一步,旨在通過(guò)技術(shù)創(chuàng)新持續(xù)提升產(chǎn)品性能,滿足用戶的期望,并在競(jìng)爭(zhēng)激烈的市場(chǎng)中保持領(lǐng)先地位。
Detailed Introduction of Product Iteration and Upgrade
在最新版本的myAGV中,我們實(shí)現(xiàn)了全面的性能升級(jí),重點(diǎn)在于提高效率、增強(qiáng)用戶體驗(yàn),并解決之前版本中的關(guān)鍵問(wèn)題。
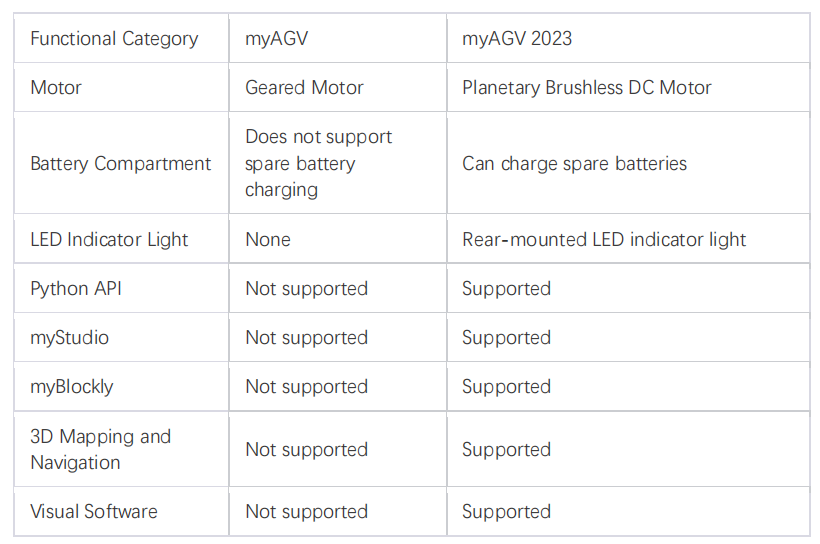
電機(jī)升級(jí):原有的減速電機(jī)被高效的行星無(wú)刷直流電機(jī)所取代。這一改變顯著提高了myAGV的運(yùn)動(dòng)效率和可靠性,同時(shí)降低了維護(hù)成本。
減速電機(jī)(原電機(jī))
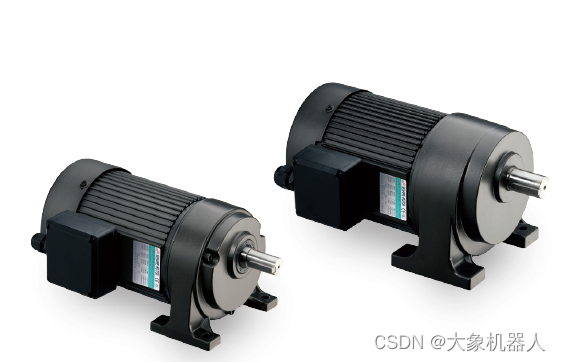
定義:減速電機(jī)是一種集成了齒輪減速箱和電動(dòng)機(jī)的組合設(shè)備。它通過(guò)齒輪減速箱降低電動(dòng)機(jī)的速度,同時(shí)增加輸出扭矩。
優(yōu)點(diǎn):提供高扭矩,成本相對(duì)較低,適合低速、高扭矩的應(yīng)用。
缺點(diǎn):體積較大,效率較低,噪音較高,且齒輪磨損會(huì)影響性能和壽命。
行星無(wú)刷直流電機(jī)(新電機(jī))
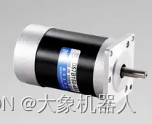
定義:行星無(wú)刷直流電機(jī)是一種高效的電機(jī),配備有行星齒輪系統(tǒng)和無(wú)刷電機(jī)。無(wú)刷電機(jī)使用電子方式(而非機(jī)械刷子)來(lái)控制電機(jī)的運(yùn)轉(zhuǎn),提供更平滑的運(yùn)行和更高的效率。
優(yōu)點(diǎn):更高的效率:相較于有刷電機(jī),無(wú)刷電機(jī)的效率更高,因?yàn)樗鼫p少了因摩擦和電刷磨損導(dǎo)致的能量損耗。
更長(zhǎng)的壽命:由于缺乏磨損的電刷,無(wú)刷電機(jī)通常擁有更長(zhǎng)的使用壽命。
更小的體積和重量:在相同的功率輸出下,無(wú)刷電機(jī)通常更小更輕。
更低的維護(hù)需求:由于沒(méi)有電刷的磨損問(wèn)題,無(wú)刷電機(jī)的維護(hù)需求更低。
應(yīng)用:行星齒輪系統(tǒng)提供了高效的扭矩傳輸,使得行星無(wú)刷直流電機(jī)非常適合需要精確控制和高效能傳輸?shù)膱?chǎng)合。
性能提升
通過(guò)從減速電機(jī)升級(jí)到行星無(wú)刷直流電機(jī),myAGV獲得了更高的能效和性能。新電機(jī)的更高效率意味著更少的能量浪費(fèi),從而提高了續(xù)航能力。同時(shí),更小的體積和重量使得myAGV在機(jī)動(dòng)性和靈活性方面也有所提升。另外,降低的維護(hù)需求和更長(zhǎng)的使用壽命進(jìn)一步提高了myAGV的總體可靠性和經(jīng)濟(jì)效益。
續(xù)航能力增強(qiáng):新版myAGV的待機(jī)續(xù)航時(shí)間達(dá)到了328分鐘,滿載工作時(shí)的續(xù)航時(shí)間為181分鐘。引入了可選的額外電池倉(cāng),使得續(xù)航時(shí)間得以翻倍,進(jìn)一步增強(qiáng)了myAGV在長(zhǎng)時(shí)間任務(wù)中的表現(xiàn)。
外觀和功能性改進(jìn):新增的LED顯示燈不僅讓myAGV看起來(lái)更具科技感,而且提高了工作狀態(tài)的可視性。這些LED燈還能幫助操作者實(shí)時(shí)監(jiān)控myAGV的狀態(tài)。

增強(qiáng)的編程接口:為了更好地滿足開發(fā)者和高級(jí)用戶的需求,我們引入了Python API接口,允許用戶更靈活地控制myAGV的運(yùn)動(dòng)。同時(shí),我們還推出了圖形化編程軟件myblockly,通過(guò)拖拽式編程提供更友好的用戶體驗(yàn)。
from pymycobot import myAGV
# Create a agv object
ma = myAGV('/dev/ttyAMA0',1000000)
# Set up LED lights
ma.set_led(mode, R, G, B)
# Get firmware version number
ma.get_firmware_version()
#Get the total current of the motor
ma.get_motors_current()
#Control the car to rotate forward, backward, left, right and forward/counterclockwise.
ma.move_control(direction_1, direction_2, direction_3)
'''
Parameters:
direction_1 – (int) Control forward or backward: 0 ~ 127 is backward, 129 ~ 255 is forward, 128 is stop.
direction_2 – (int) control left and right movement: 0 ~ 127 is right, 129 ~ 255 is left, 128 is stop.
direction_3 – (int) control rotation: 0 ~ 127 is clockwise, 129 ~ 255 is counterclockwise, 128 is stop.
'''
#Control the car to move forward
ma.go_ahead(go_speed)
#Control the car back
ma.retreat(back_speed)
#Control the car to pan to the left
ma.pan_left(pan_left_speed)
#Control the car to pan to the right
ma.pan_right(pan_left_speed)
#Stop motion
ma.stop()

交互界面的升級(jí):引入了一個(gè)7英寸的可觸摸屏幕,使操作者能夠更直觀地了解myAGV的運(yùn)行狀態(tài)和環(huán)境信息。

結(jié)構(gòu)和電機(jī)的優(yōu)化:通過(guò)對(duì)結(jié)構(gòu)和電機(jī)的升級(jí),我們顯著提升了myAGV在復(fù)雜環(huán)境下的定位導(dǎo)航精度。
新版myAGV不僅在技術(shù)上更加先進(jìn),而且在實(shí)際應(yīng)用中更加可靠和用戶友好。我們相信這些改進(jìn)將使myAGV在市場(chǎng)上更具競(jìng)爭(zhēng)力,并為用戶提供更加出色的自動(dòng)導(dǎo)引車體驗(yàn)。
Summary
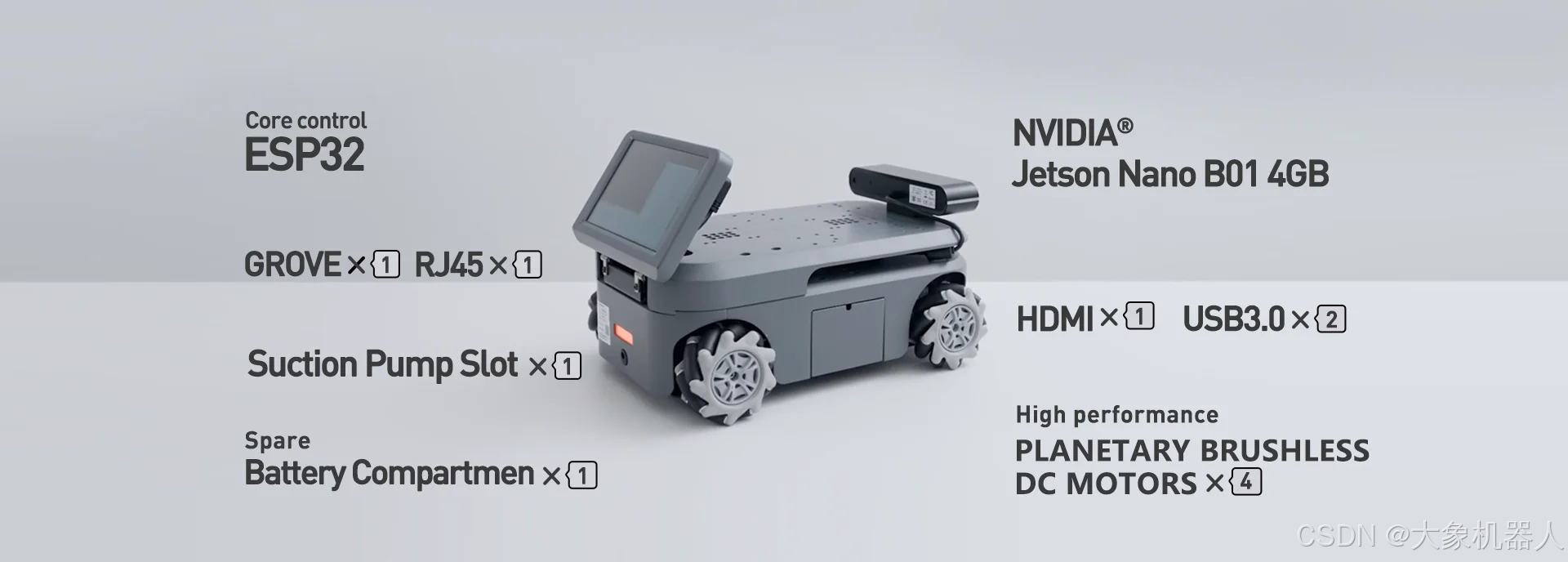
myAGV 2023的最新迭代推出了兩個(gè)版本,分別以樹莓派和NVIDIA Jetson Nano作為各自的控制核心。每個(gè)版本都針對(duì)不同的應(yīng)用場(chǎng)景和性能需求進(jìn)行了特別設(shè)計(jì),以確保滿足廣泛的用戶需求。
在本篇文章中,我們重點(diǎn)介紹了myAGV的全面性能升級(jí),展示了如何通過(guò)技術(shù)創(chuàng)新不斷提升產(chǎn)品的性能和用戶體驗(yàn)。這些升級(jí)旨在確保myAGV在自動(dòng)化導(dǎo)引車行業(yè)中保持領(lǐng)先地位,同時(shí)為用戶提供更高效、更可靠的解決方案。
在未來(lái)的文章中,我們將深入探討這兩個(gè)版本的具體特點(diǎn)和應(yīng)用場(chǎng)景,幫助您了解哪個(gè)版本的myAGV更適合您的特定需求。敬請(qǐng)期待更多關(guān)于myAGV的深入分析和實(shí)用指南,幫助您充分利用這一創(chuàng)新產(chǎn)品的強(qiáng)大功能。
審核編輯 黃宇
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29667瀏覽量
212523 -
AGV
+關(guān)注
關(guān)注
27文章
1436瀏覽量
42257 -
python
+關(guān)注
關(guān)注
56文章
4826瀏覽量
86589 -
大象機(jī)器人
+關(guān)注
關(guān)注
0文章
86瀏覽量
113
發(fā)布評(píng)論請(qǐng)先 登錄
T90智能電烙鐵,全方位升級(jí)!PD3.1 140W大功率加熱,功率升級(jí),IPS LCD彩屏,屏幕升級(jí),質(zhì)感升級(jí)!
訊飛星火X1全新升級(jí)
商湯大裝置SenseCore 2.0全新升級(jí)
曙光存儲(chǔ)全新升級(jí)AI存儲(chǔ)方案
重磅升級(jí)!PI再推MotorXpert軟件,革新電機(jī)驅(qū)動(dòng)設(shè)計(jì)
RT-Thread ART-Pi二代正式發(fā)布
RT-Thread全新發(fā)布ART-Pi二代,攜手ST H7R芯片!

Raspberry Pi Pico 2
銳馳智光官方網(wǎng)站全新升級(jí)
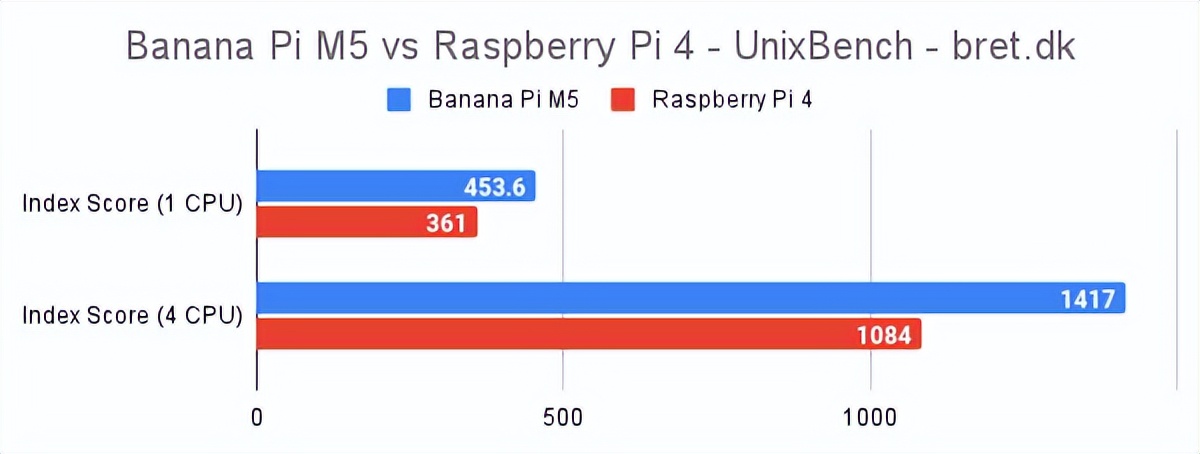
Banana Pi M5 與 Raspberry Pi 4 – 基準(zhǔn)測(cè)試
PI助力aCentauri車隊(duì)在太陽(yáng)能車挑戰(zhàn)賽中大放異彩
e絡(luò)盟開售Raspberry Pi AI 攝像頭
e絡(luò)盟發(fā)售功能強(qiáng)大的入門級(jí) Raspberry Pi 5 2GB

使用myAGV、Jetson Nano主板和3D攝像頭,實(shí)現(xiàn)了RTAB-Map的三維建圖功能!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論