") TogetherROS系統(tǒng)的通信功能測(cè)試
TogetherROS系統(tǒng)的通信功能測(cè)試

通信測(cè)試
先來(lái)測(cè)試一下TogetherROS?·Bot系統(tǒng)的通信功能。
我們需要啟動(dòng)兩個(gè)終端,分別連接到旭日X3派上,并分別按以下命令配置環(huán)境變量。
終端1:
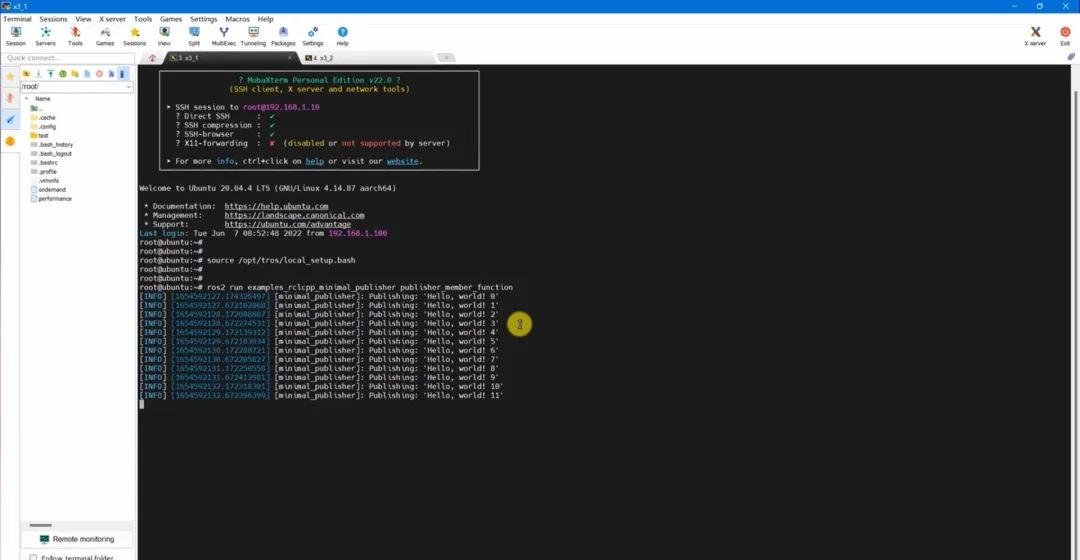
** source /opt/tros/local_setup.bash** ros2 run examples_rclcpp_minimal_publisher publisher_member_function
終端2:
** source /opt/tros/local_setup.bash** ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
接下來(lái),我們用ros2 run命令運(yùn)行節(jié)點(diǎn):
運(yùn)行第一個(gè)例程:
ros2 run example_rclcpp_minimal_publisher publisher_member_function
這是一個(gè)用C++寫(xiě)的最小化的發(fā)布者程序,其中節(jié)點(diǎn)叫publisher_member+function,按回車(chē)運(yùn)行該節(jié)點(diǎn)。
可以看到這個(gè)節(jié)點(diǎn)開(kāi)始不斷循環(huán)發(fā)布信息,每次發(fā)布的信息為字符串形式,內(nèi)容是“Hello,world! +數(shù)字”。
同樣,在終端2的命令行窗口,輸入以下命令并回車(chē)開(kāi)啟訂閱者節(jié)點(diǎn)。
ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
這個(gè)訂閱者節(jié)點(diǎn)會(huì)獲取到、并顯示出剛才發(fā)布者節(jié)點(diǎn)發(fā)布的信息。

通過(guò)這樣一個(gè)例程,我們驗(yàn)證了兩個(gè)節(jié)點(diǎn)之間的通信沒(méi)有問(wèn)題。這這是一個(gè)基于DDS的話(huà)題通信。
按CTRL+C可以關(guān)閉該例程。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29673瀏覽量
212536 -
ROS
+關(guān)注
關(guān)注
1文章
287瀏覽量
17700 -
系統(tǒng)
+關(guān)注
關(guān)注
1文章
1032瀏覽量
21801
發(fā)布評(píng)論請(qǐng)先 登錄
VXI/GPIB總線(xiàn)的通信設(shè)備測(cè)試診斷系統(tǒng)設(shè)計(jì)
PCBA功能測(cè)試系統(tǒng)
無(wú)線(xiàn)通信系統(tǒng)的安裝維護(hù)測(cè)試
數(shù)據(jù)通信測(cè)試儀表功能概述
LabVIEW開(kāi)發(fā)衛(wèi)星通信的自動(dòng)化測(cè)試系統(tǒng)
系統(tǒng)功能安全測(cè)試技術(shù)研究
低壓電力線(xiàn)通信點(diǎn)對(duì)點(diǎn)通信性能測(cè)試系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
用于功能測(cè)試系統(tǒng)設(shè)計(jì)的系統(tǒng)元件方法
LabVIEW系統(tǒng)設(shè)計(jì)和RF通信

通信設(shè)備自動(dòng)測(cè)試系統(tǒng)案例

納特通信的多探頭球面近場(chǎng)測(cè)試系統(tǒng)與緊縮場(chǎng)測(cè)試系統(tǒng)(遠(yuǎn)場(chǎng))
TogetherROS Bot相機(jī)驅(qū)動(dòng)方法
TogetherROS系統(tǒng)中如何配置網(wǎng)絡(luò)連接
在TogetherROS中如何安裝ROS2功能包

NB-IOT類(lèi)產(chǎn)品的通信功能生產(chǎn)測(cè)試方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論