 HJ-FR3協作機器人為什么備受高校和科研機構青睞?
HJ-FR3協作機器人為什么備受高校和科研機構青睞?

一、協作機器人研究現狀
協作機器人是能夠在共享空間中與人類交互并開展安全工作的新型機器人,由于輕量、安全的特點,在柔性制造、社會服務、醫療健康等領域展現出了良好的應用前景,也成為了當前學術界機器人領域的研究熱點,相關研究主題包括:
機器智能:包括集成機器學習、深度學習和人工智能技術,提高機器人的自主性和適應性,幫助機器人參與更加復雜的協作任務。
人機交互:嘗試解決協作機器人如何與人類進行有效的合作,并在不同應用情景下測試、評估協作機器人的人類可接受度。
安全性:解決機器人與人類協作時避免交互意外的問題,包括機器人視覺、力控等。
應用性:緊密結合具體應用場景,研究協作機器人在不同行業的實際應用。
而在全球范圍內高校與科研機構的研究中,HJ-FR3一直是熱門選擇:在ICRA2023論文集中就有130余篇論文采用了HJ-FR3機器人作為研究平臺;作為也是ICRA、IROS等頂尖國際學術會議研發使用最多的機器人,關于HJ-FR3的研究成果涵蓋了上述研究熱點,包括自主視覺抓取、多機協同工作、人機交互研究、自適應裝配、AR+機器人、遙操作、主從力反饋、仿生手臂等。
斯坦福大學基于HJ-FR3開展機器人目標模仿學習研究
現任NVIDIA機器人研究高級總監Dieter Fox曾說:“Franka機器人提供了理想的用于研究機器人的具備實時響應和強大操控性能的開源環境,非常適用于開展機器人和人類協同操作方向的研究。”

Dieter Fox的發言揭示了為何HJ-FR3 如此受學術界青睞:強大的機器人系統與開源的FCI控制接口,使其在眾多協作機器人中脫穎而出。
二、HJ-FR3的科研優勢
HJ-FR3作為專門面向科研領域的協作機器人,始終保持著對最前沿機器人技術的探索。HJ-FR3具備7個軸,每個軸上都配備了行業領先的13位高精度扭矩傳感器,重復精度高達0.1毫米。精確力控的機器人系統,為HJ-FR3開展更加復雜的機器人研究奠定了基礎;且能輕松實現拖拽示教,提高編程效率。
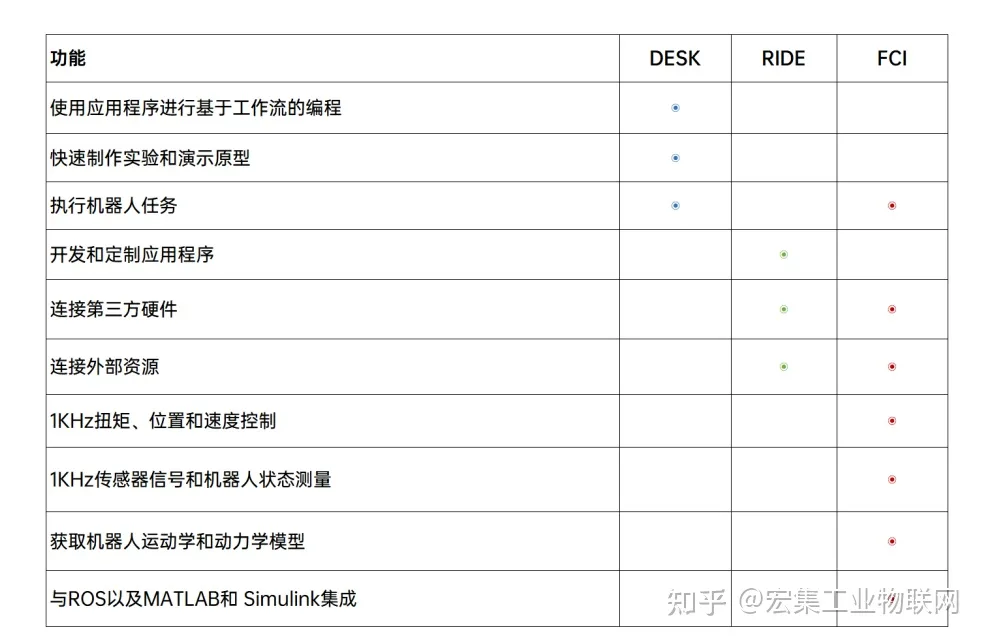
最重要的是,HJ-FR3為科研人員提供了機器人控制和學習能力的底層訪問權限。HJ-FR3機器人具備多樣的接口(DESK、RIDE、FCI),可以充分滿足不同科研場景的需求,如下表所示:DESK提供基于應用程序的用戶界面,通過拖放實現簡單快速的任務編程,適合初學者;RIDE可集成外部功能,如附加傳感器和攝像頭,用于創建高性能機器人技能;而FCI接口和其C++實現libfranka,可以與最流行的生態系統ROS、ROS2以及MATLAB集成,為科研人員提供了最大程度的便捷。
1.靈活的FCI接口
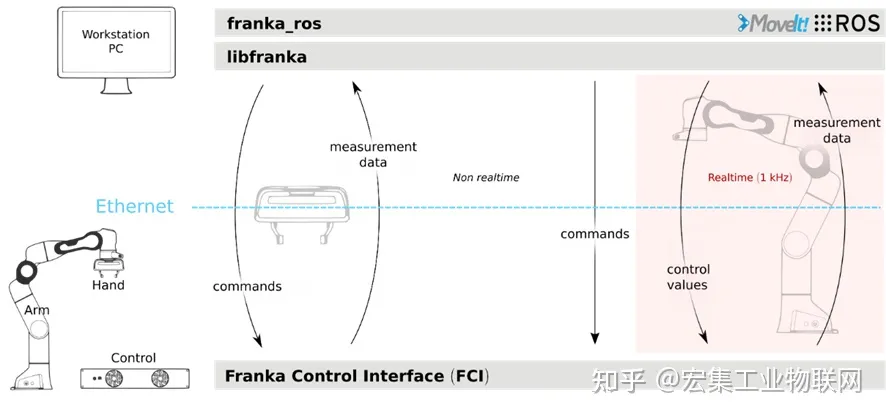
HJ-FR3機器人附加的實時控制接口FCI (Franka Control Interface),是開展力控制、運動算法、抓取策略、交互場景、觸覺感知和機器學習等研究和測試的理想平臺。

FCI控制接口允許與機械臂進行快速直接的底層雙向連接。它為科研人員提供機器人的實時狀態,并通過以太網連接的外部工作站PC實現直接控制。此外,FCI接口還能提供1kHz下的實時控制值、實時測量值等信息。
2. 強大的libfranka
libfranka 是FCI客戶端的C++實現。它處理與 Control的網絡通信并提供接口以易化:
通過使用我們的開源C++接口libfranka,可以使用5 種不同的接口(C++、ROS、MoveIt、MATLAB、Simulink)以1kHz的頻率發送實時控制值,包括:
●帶重力和摩擦力補償的關節扭矩命令
●關節角度或速度命令
●笛卡爾位姿或速度命令
同時,可以訪問 1kHz測量值:
●測量的關節數據,例如角度、角速度和連桿側扭矩傳感器信號
●估算的外部施加的扭矩和力
●各種碰撞和接觸信息
還可以訪問機器人模型庫model library,該庫提供:
●所有機器人關節的正向運動學
●所有機器人關節的雅可比矩陣
●動力學方面:慣性矩陣、科式力項和離心矢量項和重力矢量項
三、應用舉例
HJ-FR3機器人與整個ROS生態系統集成,將libfranka集成到ROS Control,還包括機器人和末端執行器的URDF模型和詳細3D網格,允許實現可視化(例如 RViz)和運動學模擬。MoveIt!集成使移動機器人和控制夾爪變得容易。
以仿真石頭從A運輸到B的取放程序為例,通過 Gazebo GUI,可以在其中看到帶有石頭和RViz 的環境,并用它來控制機器人的末端執行器位姿。
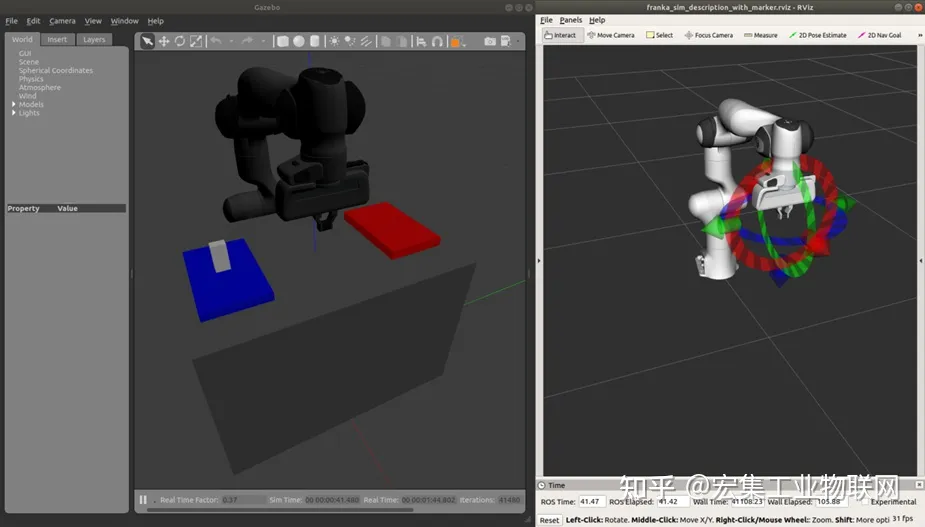
取放示例的Gazebo GUI(左)和RViz(右)
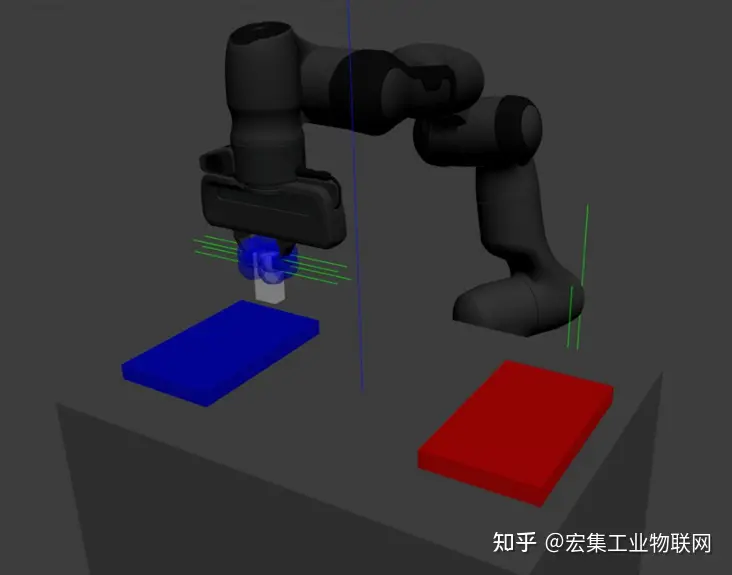
要打開夾爪,只需向move action發送一個目標。科研人員可以使用開源例程,使用 RViz 中的交互式標記Gizmo移動末端執行器。移動機器人,使白色石頭位于夾爪的手指之間,準備好被撿起。然后,我們只需要使用grasp action來在抓握后施加一個力,使物體不掉落。如果抓取成功,夾爪將把石頭挪移到位。如果不是,則可能是目標公差太小并且action失敗。現在將物體輕輕地移到紅色的落點區域,將其放在紅色墊子上后,通過夾爪的stop action停止抓握。
>>總而言之,HJ-FR3具備精準力控的機器人系統與集成流行生態的FCI控制接口,并提供直觀的編程界面和便捷的拖拽示教功能,為科研人員縮短了學習周期,提高了研究效率。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
29697瀏覽量
212599 -
協作機器人
+關注
關注
2文章
515瀏覽量
30556
發布評論請先 登錄
華沿機器人:以協作機器人技術賦能汽車智能制造新時代

慧通測控的協作機器人有哪些測試項目?

激光干涉儀:解鎖協作機器人DD馬達的精度密碼

工業機器人與協作機器人概念不同

是德E5071C矢量網絡分析儀在科研機構實驗測量應用
面向教學科研的智能車設計及實踐實驗室

【「具身智能機器人系統」閱讀體驗】+初品的體驗
MiR推出MC600移動協作機器人
協作機器人TM25S:高效人機協作改變傳統作業方式






 工商網監
工商網監
評論