") 一文帶你了解毫米波雷達
一文帶你了解毫米波雷達

一、毫米波雷達簡介
(一)定義
雷達是英文 Radar 的音譯,源于 Radio Detection and Ranging 的縮寫,原意是“無線電探測和測距”,即用無線電方法發(fā)現(xiàn)目標并測定它們在空間的位置。毫米波雷達是指一種工作在毫米波頻段(millimeter wave)的雷達傳感器。
國際電信聯(lián)盟(ITU)發(fā)布的《無線電規(guī)則》(2020 年)和我國《無線電頻率劃分規(guī)定》中,將無線電頻率在 30-300GHz 的頻段(波長 1-10mm)稱呼為毫米波頻段。
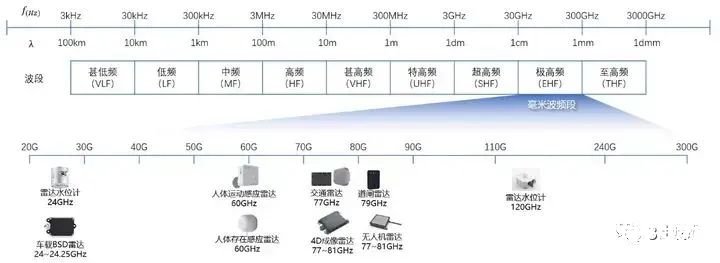
無線電及毫米波頻段劃分圖
目前國內(nèi)使用的 24GHz、60GHz、77GHz、80GHz 等雷達產(chǎn)品統(tǒng)歸為毫米波雷達。
(二)基本特性
作為雷達系列中的高頻段產(chǎn)品,毫米波雷達具有頻帶寬、波長短、大氣傳播損耗較大等基本特性,各特性對應的優(yōu)缺點概括如下圖所示。
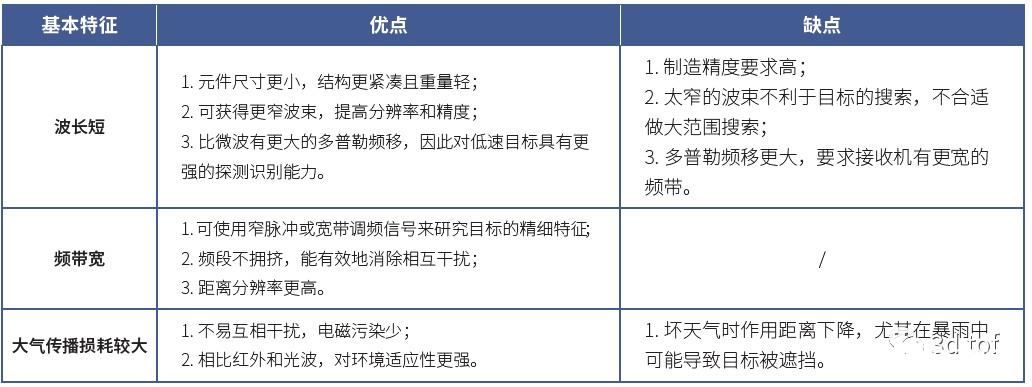
從上表可以看出,毫米波雷達具有顯著的實用優(yōu)勢,但需要說明的是,我們并不是否定其他傳感器的作用,毫米波雷達的大氣傳播損耗較大,適用于近距離場景,而在遠程和超遠程應用中,微波雷達仍然是探測目標的主力軍。微波、毫米波、紅外、激光等系統(tǒng)的作用應該是互補的、缺一不可的。
(三)核心功能
毫米波雷達的核心功能包括測距、測速、測方位角、微動探測和4D 成像等,通常雷達系統(tǒng)是通過同時測量2-3 個功能參量而構成一個應用產(chǎn)品。圖表列舉了每種功能的典型應用及功能介紹。

(四)基本原理
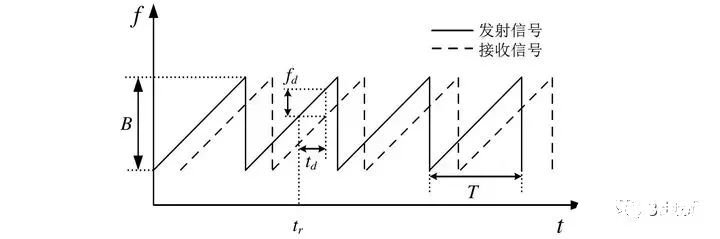
毫米波雷達三個基礎的系統(tǒng)功能為距離測量、速度測量和角度測量。以 FMCW 雷達系統(tǒng)為例,其基本功能實現(xiàn)原理為:
1、測距原理
FMCW 毫米波雷達的測距主要是利用發(fā)射信號和回波信號之間的時延 td,結合毫米波傳播速度 c、以及目標和雷達的相對速度 v 推算出毫米波雷達和檢測目標的相對距離 R 。
毫米波雷達具有較高的距離分辨率和測距精度,且可以通過后端算法實現(xiàn)毫米級的精確測距。
毫米波雷達測距能力與發(fā)射功率、天線增益、天線波束角和物體反射截面積等因數(shù)有關。通常發(fā)射功率越大,天線增益越高、天線波束角越窄以及物體反射截面積越大,雷達能夠檢測到的有效回波就越強,測量距離就越遠。
2、測速原理
FMCW 毫米波雷達通常是利用多普勒效應來確定目標的徑向速度。當目標向雷達天線靠近時,反射信號頻率將高于發(fā)射機頻率;反之,當目標遠離天線而去時,反射信號頻率將低于發(fā)射機頻率。
毫米波雷達測速范圍和目標運動方向有關,目標靠近雷達做徑向運動,目標速度為負;目標遠離雷達做徑向運動,目標速度為正。測速精度數(shù)據(jù)取決于信噪比(衡量雷達接收信號質(zhì)量的單位)。信噪比高不高,是衡量毫米波雷達的目標檢測性能是否強大的根本參數(shù)。
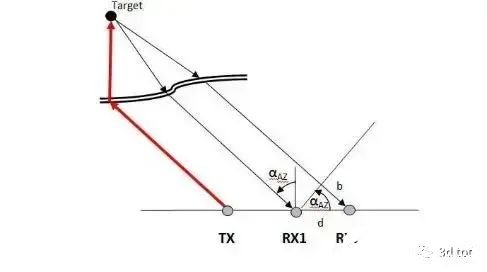
3、測角原理
關于毫米波雷達目標方位角的測量,是通過并列的接收天線收到同一目標反射的雷達波相位差計算得到目標的方位角。原理如下圖所示:其中方位角可以通過兩個接收天線 RX1 和 RX2 之間的幾何距離 d 以及兩天線收到雷達回波的相位差 b 通過簡單的三角函數(shù)計算得到。
在角度測量中,毫米波雷達可以通過MIMO(Multiple-Input Multiple-Output,多輸入多輸出)天線陣列增加系統(tǒng)虛擬孔徑,進而獲得更高的分辨率。
(五)系統(tǒng)組成
毫米波雷達系統(tǒng)主要由天線、射頻前端組件、數(shù)字信號處理器和雷達控制電路等組成。
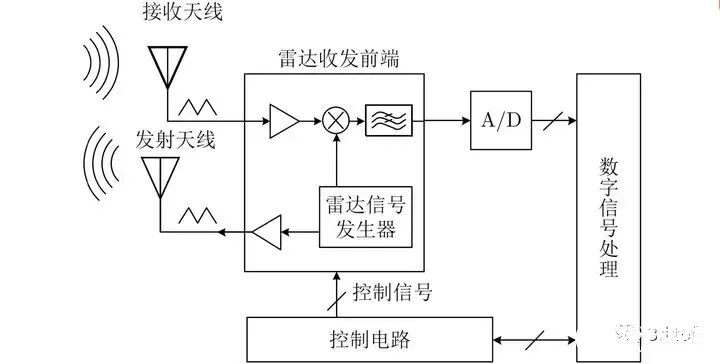
射頻前端組件:負責毫米波信號調(diào)制、發(fā)射、接收以及回波信號的解調(diào)。單片微波集成電路(MMIC)大大簡化了雷達系統(tǒng)結構,集成度高、成本低且成品率高,更適合于大規(guī)模生產(chǎn),是目前主流的毫米波雷達射頻前端組件集成方式。
數(shù)字信號處理器:通過嵌入不同的信號處理算法,提取從前端采集得到的中頻信號,獲得特定類型的目標信息。毫米波雷達的數(shù)字處理主要算法包括:陣列天線波速形成和掃描算法、信號預調(diào)理、雜波處理算法、目標檢測 / 測量的算法、目標分類與跟蹤算法以及信息融合算法。數(shù)字信息處理是毫米波雷達穩(wěn)定性、可靠性的核心。
天線:可以發(fā)射和接收毫米波,是毫米波雷達的重要部件,體積小,通常集成在 PCB 板上,按照天線模式可分為遠程雷達(開口約 30°,200m)、中程雷達(開口約 60°,100m)和近程雷達(開口約 120°,30m)。
控制電路:根據(jù)信號處理器獲得的目標信息,結合雷達終端動態(tài)信息進行數(shù)據(jù)融合,最終通過主處理器進行智能處理,對雷達終端前方出現(xiàn)的障礙物進行分析判斷,迅速做出處理和發(fā)出指令,及時傳輸給報警顯示系統(tǒng)和制動執(zhí)行系統(tǒng)。
二、毫米波雷達應用
(一)應用范圍
毫米波雷達應用范圍涵蓋車規(guī)級、工業(yè)級、消費級和醫(yī)療級四類。主要應用場景如圖所示。
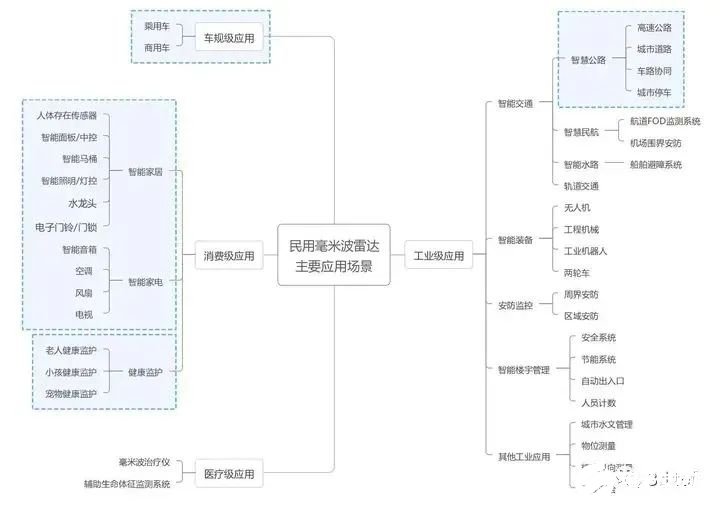
汽車級應用是毫米波雷達最早的商用場景,同時也是當前毫米波雷達最大的應用市場;工業(yè)級應用主要包括智能交通、安防監(jiān)控、智能裝備、智能樓宇、工業(yè)測量等領域,應用場景最為廣泛,同時具備附加值高的特點;消費級應用主要包括智能家居、智慧康養(yǎng)、消費電子等,是近兩年興起速度較快、關注度較高的新興應用領域,未來具有較大的發(fā)展?jié)摿Α?/p>
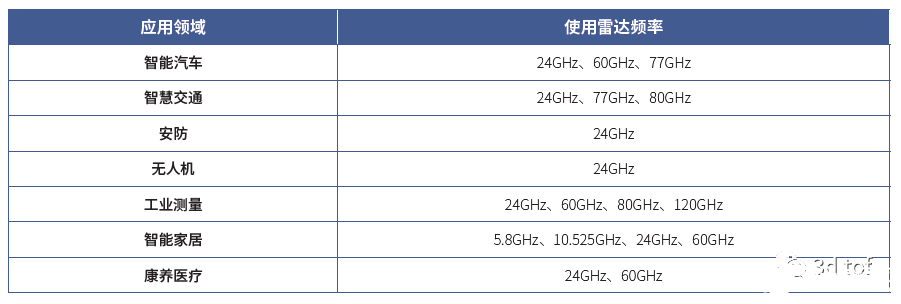
(二)使用頻率
毫米波雷達有24GHz、60GHz、77GHz、80GHz、120GHz 等頻段產(chǎn)品。目前,國內(nèi)常用的毫米波雷達頻段為24GHz、60GHz 和 77GHz 這三個頻段。24G 毫米波雷達在各方面性能比較成熟,且成本較低,適用的領域會更廣,例如交通、安防、智能家居、康養(yǎng)醫(yī)療等等;77GHz 毫米波雷達在精度上相比 24GHz 更高,主要應用于汽車領域,且應用規(guī)模已超過 24GHz。
(三)工作體制
根據(jù)輻射電磁波方式不同,毫米波雷達主要有脈沖體制以及連續(xù)波體制兩種。其中連續(xù)波又可以分為 FSK(頻移鍵控)、PSK(相移鍵控)、CW(恒頻連續(xù)波)、FMCW(調(diào)頻連續(xù)波)等方式,圖表中對比了不同工作體制的優(yōu)勢和不足。
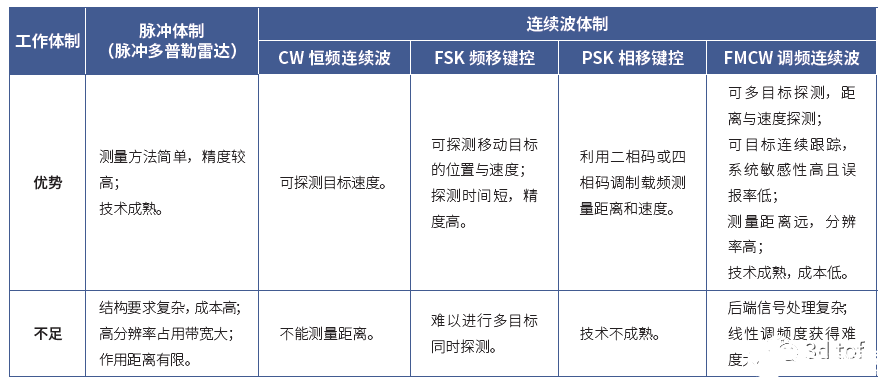
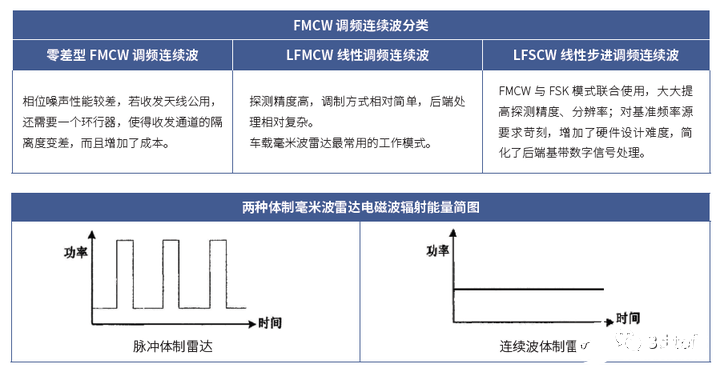
目前,連續(xù)波體制中的調(diào)頻連續(xù)波 FMCW 是主流方案。調(diào)頻連續(xù)波是連續(xù)發(fā)射調(diào)頻信號,以測量距離、角度和速度等。調(diào)頻連續(xù)波不僅能同時測出多個目標的距離和速度信息,還可對目標進行連續(xù)跟蹤。相對其他電磁波雷達,調(diào)頻連續(xù)波雷達的發(fā)射功率較低、且成本較低,被毫米波雷達廠商廣泛使用。
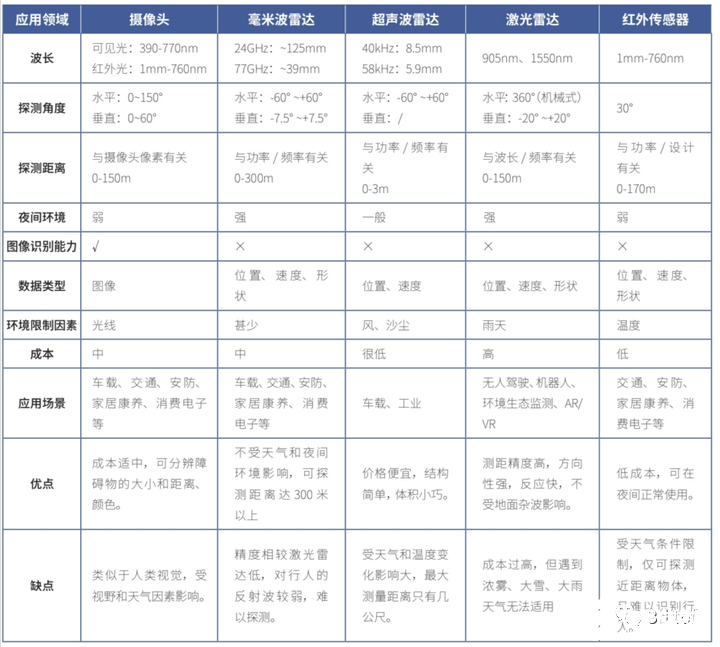
(四)競品對比
毫米波雷達具有探測性能穩(wěn)定、作用距離較長、環(huán)境適用性好等特點。與超聲波雷達相比,毫米波雷達具有體積小、質(zhì)量輕和空間分辨率高的特點。與紅外、激光、攝像頭等光學傳感器相比,毫米波雷達穿透霧、煙、灰塵的能力強,具有全天候全天時的特點。各類傳感器的優(yōu)缺點如圖表所示。
審核編輯 黃宇
-
探測
+關注
關注
0文章
215瀏覽量
20646 -
無線電
+關注
關注
61文章
2166瀏覽量
117825 -
毫米波雷達
+關注
關注
107文章
1094瀏覽量
65272
發(fā)布評論請先 登錄
ADAS和防撞系統(tǒng)中的毫米波雷達方案

毫米波雷達信號的傳輸特性
毫米波雷達的基頻和調(diào)制技術 毫米波雷達在機器人導航中的應用
毫米波雷達與超聲波雷達的區(qū)別
毫米波雷達技術優(yōu)勢分析 毫米波雷達在安防監(jiān)控中的應用
毫米波雷達與激光雷達比較 毫米波雷達在自動駕駛中的作用
毫米波雷達工作原理 毫米波雷達應用領域
康謀技術 | 毫米波雷達技術解析


毫米波雷達是聲波還是電磁波
毫米波雷達與超聲波雷達的區(qū)別是什么
毫米波雷達與多普勒雷達區(qū)別是什么
簡述毫米波雷達的結構、原理和特點
毫米波雷達具有哪些特點和優(yōu)勢
激光雷達VS毫米波雷達,一文讀懂!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論