") 愛普生三軸加速度計(jì)傳感器HGPM01
愛普生三軸加速度計(jì)傳感器HGPM01

HGPM01是基于高性能陀螺儀陀傳感器和加速度計(jì)開發(fā)的模組,內(nèi)置3軸陀螺儀和3軸加速度計(jì)傳感器。依賴于高精度的傳感器、高性能的處理器和高級的數(shù)字信號處理算法,該模組輸出非常穩(wěn)定的角速度值,加速度值。模塊可以支持SPI或UART數(shù)據(jù)通訊。
相控陣天線是一種具有電子轉(zhuǎn)向功能的天線陣列,不需要天線進(jìn)行任何物理移動,即可改變輻射信號的方向和形狀,這種電子轉(zhuǎn)向的精準(zhǔn)定位離不開角速度和加速度測量。天線的航偏、橫滾、俯仰都會影響到定位系統(tǒng)的準(zhǔn)確性,且由于存在3個(gè)軸,定位系統(tǒng)校準(zhǔn)難度倍增。
隨著相控陣系統(tǒng)的精度上升,射頻頻譜不斷增高,獨(dú)立陣列設(shè)計(jì)越來越大,系統(tǒng)需要更高性能的慣性測量單元(IMU)來支持。天線定向誤差可能來自頻譜密度、RMS、速度隨機(jī)游走、偏移重復(fù)性、跨軸靈敏度等方面,因此選用合適的慣性測量單元(IMU)尤為重要。
EPSON(愛普生)聯(lián)合第三方推出的慣性測量單元HGPM01是基于高性能陀螺儀陀傳感器和加速度計(jì)開發(fā),內(nèi)置高性能三軸陀螺儀、三軸加速度計(jì),可輸出高精度的航偏、橫滾、俯仰角度數(shù)據(jù)以及三維旋轉(zhuǎn)角速度、三維線性加速度數(shù)據(jù)、實(shí)時(shí)溫度。使用IMU對天線檢測,可以克服機(jī)械方法旋轉(zhuǎn)天線時(shí),慣性大、速度慢的缺點(diǎn)。

1、HGPM01特性如下:
●高精度6軸陀螺儀模組
●輸出三軸加速度值,三軸角速度值
●數(shù)字通訊接口SPI或UART
●產(chǎn)品尺寸:37.70 * 24.15 * 9.50 mm
●低功耗
2、HGPM01產(chǎn)品應(yīng)用優(yōu)勢:
●算法:內(nèi)置傳感器自學(xué)習(xí)校正算法,對陀螺儀零偏實(shí)時(shí)動態(tài)估計(jì)并補(bǔ)償。且自帶高性能的處理器和高級的數(shù)字信號處理算法,無論是UART輸出還是SPI輸出,無需客戶進(jìn)行計(jì)算。
●可靠性強(qiáng):輸出數(shù)據(jù)數(shù)達(dá)到400Hz,動態(tài)性能出色,非常適合從靜態(tài)到高速運(yùn)動的高精度測量,且具有的可靠性。
●方便評估:愛普生還提供相關(guān)評估板,可觀測IMU模組產(chǎn)品的原始數(shù)據(jù)。
●尺寸小:產(chǎn)品尺寸37.70 * 24.15 * 9.50 mm,可直接安裝在天線轉(zhuǎn)臺上。
●量程大:角速度量程±400dps,完*滿足客戶±100dps的需求;加速度量程±16g,滿足客戶5g的需求。
3、其它注意事項(xiàng)
●模組的安裝角度,請盡量水平安裝,模組的法線和機(jī)器的旋轉(zhuǎn)軸平行
●模組務(wù)必可靠安裝,保證工作過程中不松動
●模組盡量不要靠近熱源,發(fā)熱大的或者發(fā)熱變化大的區(qū)域,比如電源功率部分,馬達(dá)驅(qū)動功率部分,主MCU,這些地方通常發(fā)熱比較厲害,而且冷熱不均勻
●運(yùn)行過程中,盡量平穩(wěn),避免大的碰撞,避免突然之間大角度的旋轉(zhuǎn),盡量按照(停止,加速,勻速,減速,停止)這樣的運(yùn)動行為保證運(yùn)動的平滑性
-
傳感器
+關(guān)注
關(guān)注
2564文章
52818瀏覽量
765626 -
愛普生
+關(guān)注
關(guān)注
0文章
480瀏覽量
22653 -
加速度計(jì)
+關(guān)注
關(guān)注
6文章
722瀏覽量
46727
發(fā)布評論請先 登錄
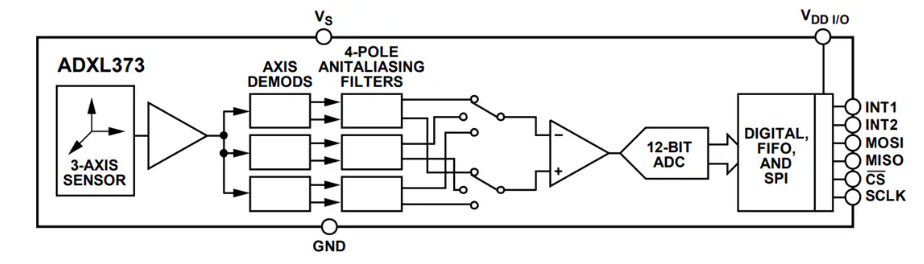
Analog Devices Inc. ADXL373微功耗3軸MEMS加速度計(jì)數(shù)據(jù)手冊
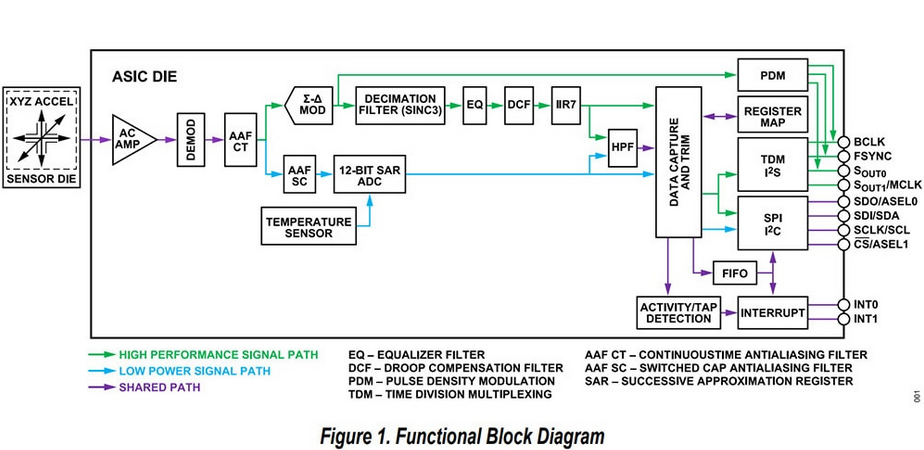
ADXL382 低噪聲密度、低功耗、3 軸加速度計(jì)數(shù)據(jù)手冊和產(chǎn)品介紹
高性能石英加速度計(jì),滿足最嚴(yán)苛應(yīng)用需求
ADXL345超低功耗3軸加速度計(jì)中文手冊
十軸姿態(tài)傳感器模塊 | 集成加速度計(jì)、陀螺儀、磁力計(jì),自帶BLE5.0藍(lán)牙

MEMS加速度計(jì)的工作原理是什么
PCB Piezotronics推出357A67型三軸電荷輸出加速度計(jì)
具有TLV2772的3V加速度計(jì)

EPSON工業(yè)級加速度計(jì)選型

XC1011SD (X2E0000210002) 愛普生汽車用角速度_加速度組合傳感器選型資料
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(4)----測量傾斜度

e2studio開發(fā)三軸加速度計(jì)LIS2DW12(2)----基于中斷信號獲取加速度數(shù)據(jù)
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(1)----輪詢獲取加速度數(shù)據(jù)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論