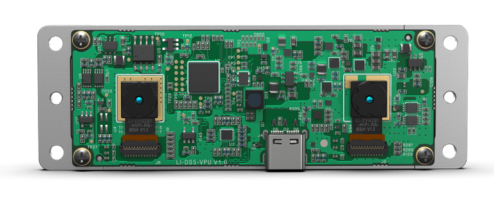
") 基于ZU5EV的立體視覺+慣導(dǎo)SLAM導(dǎo)航套件
基于ZU5EV的立體視覺+慣導(dǎo)SLAM導(dǎo)航套件

|
便攜式HD-SDI模擬源測(cè)試設(shè)備 一、平臺(tái)簡(jiǎn)介 便攜式手提CameraLink模擬源測(cè)試設(shè)備,以PCIe的HD-SDI播出卡和X86主板為基礎(chǔ),構(gòu)建便攜式的手提設(shè)備。 平臺(tái)默認(rèn)操作系統(tǒng)為win7 64位系統(tǒng);具備豐富的外設(shè)接口,如VGA、HDMI、千兆網(wǎng)口、USB2.0/3.0以及方便的JTAG調(diào)試口;平臺(tái)存儲(chǔ)為8G內(nèi)存、256G固態(tài)硬盤,具備高速數(shù)據(jù)讀寫能力,可滿足大多數(shù)應(yīng)用場(chǎng)景。屏幕為觸摸顯示屏。 FPGA HD-SDI播出卡是以Kintex-7XC7K325T PCIeX4的HD-SDI數(shù)據(jù)輸出卡,支持HD-SDI的數(shù)據(jù)格式定制和圖片生成的定制設(shè)計(jì)。   二 機(jī)箱主板配置詳細(xì)說明: 一、機(jī)箱 材料 鋁合金內(nèi)部個(gè)別承重件為鍍鋅板 表面工藝 整體氧化外表面噴粉(軍綠色) 尺寸 270x110x200(mm)(W×H×D) 整機(jī)重量 供電 +12V 散熱方式 風(fēng)冷散熱 二、觸摸屏 規(guī)格 10.1寸液晶電容觸摸屏 三、主板 外設(shè)接口 VGA, HDMI, LVDS/EDP 支持同步/異步雙顯功能;6個(gè)USB(其中1 個(gè)USB3.0,2個(gè)板載插針);6COM RS-232, COM3 可設(shè)置成RS485;雙Intel PCI-E總線千兆網(wǎng)卡;1 個(gè)MINI PCIE 擴(kuò)展, 1 個(gè)PCIE x4 擴(kuò)展 電源 DC 12V輸入 處理器 Intel?Core?第七代Kaby lake-U Soc i3/i5/i7 處理器(目前為i3) 操作系統(tǒng) 支持windows 8;Windows 7等(預(yù)裝Windows7系統(tǒng)) 內(nèi)存 1個(gè)筆記本內(nèi)存插槽,支持DDR3/L 1066/1333/1600MHz 最大至8GB(預(yù)裝8G內(nèi)存條);1×SATA 3.0,1×mSATA2.0固態(tài)硬盤接口(預(yù)裝三星msata512G SSD硬盤:讀:510MB/s,寫:393MB/s) 工作溫度 -15~60℃ 存儲(chǔ)溫度 -40~75℃ 環(huán)境濕度 0~90% 空氣濕度,無冷凝 防塵防水 獨(dú)特的前面板設(shè)計(jì),使整機(jī)結(jié)構(gòu)堅(jiān)固可靠,美觀時(shí)尚。能符合絕大多數(shù)應(yīng)用環(huán)境的防塵防水要求。 WIFI無線網(wǎng)絡(luò) 該系列平板電腦可以外接WIFI無線網(wǎng)卡或者網(wǎng)線連接 其他 可安裝打印機(jī)、辦公軟件、媒體播放器等 產(chǎn)品定制 可根據(jù)需求定制 三、內(nèi)部集成HD-SDI輸出板卡   板卡特征 支持1路 HD-SDI 3Gsps輸出,支持視頻格式1080P,60fs,如下: 輸出分辨率 640480@60, 640480@75, 800600@50, 800600@60, 800600@75, 1024x768@50, 1024x768@60, 1024x768@75, 1280768@50, 1280768@60, 1280800@60, 12801024@50, 12801024@60, 12801024@75, 1360768@60,1366x768@50, 1366x768@60, 14001050@50, 14001050@60, 1600900@60, 16001200@50, 16001200@60, 16801050@60, 19201200@60, 480i60, 480p60, 576i50, 576p50, 720p50, 720p59.94, 720p60, 1080p23.976, 1080p24, 1080p25, 1080p29.97, 1080p30, 1080p50, 1080p59.94, 1080p60, 2K50, 2K60. ●支持PCIeX4; ●支持FPGA的數(shù)據(jù)格式定制,基于GTP Aurora,可任意圖像格式。 ●支持非DDR緩存的低延時(shí)輸出; ●支持復(fù)合視頻輸出; ●科學(xué)研究的伴侶。 三 模擬源軟件 1、1080P 50HZ 實(shí)時(shí)顯示 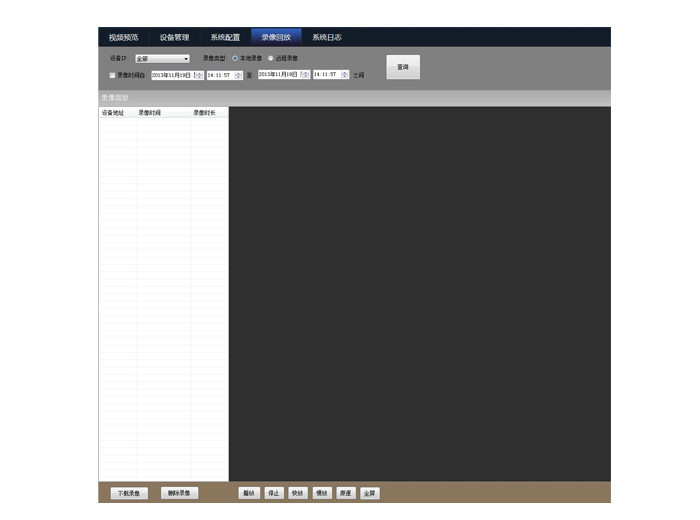 2、基本圖像生成。包括灰度處理、灰度直方圖、灰度均衡、梯度銳化、均值濾波、中值濾波、邊窗濾波、心態(tài)學(xué)濾波等。 灰度處理: 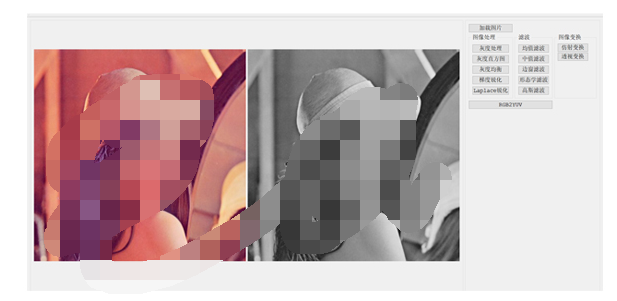 邊窗濾波:  形態(tài)學(xué)濾波:  人臉識(shí)別:   |
審核編輯 黃宇
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
人臉識(shí)別
+關(guān)注
關(guān)注
77文章
4080瀏覽量
84137
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
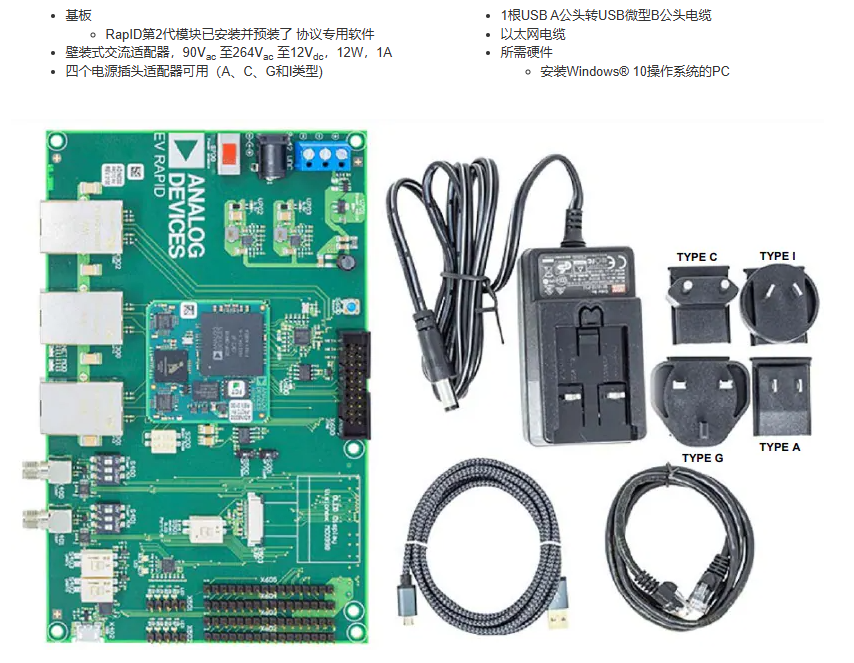
Analog Devices Inc. EV-RPG2評(píng)估套件數(shù)據(jù)手冊(cè)
Analog Devices Inc. EV-RPG2評(píng)估套件評(píng)估從主機(jī)處理器 到可編程邏輯控制器 (PLC) 或基于PC的工具的通信路徑。 Analog Devices Inc. EV
三維高斯?jié)姙R大規(guī)模視覺SLAM系統(tǒng)解析
仍未得到探索。本文提出一種基于立體相機(jī)的三維高斯?jié)姙R大規(guī)模視覺SLAM系統(tǒng)LSG-SLAM。通過在EuRoC數(shù)據(jù)集上的廣泛評(píng)估,LSG-SLAM

智能軟件+硬件解決方案克服實(shí)時(shí)立體視覺中的挑戰(zhàn)
現(xiàn)出色,特別適用于工業(yè)機(jī)器人應(yīng)用。從料箱撿取到自主導(dǎo)航,立體視覺使得各種機(jī)器人應(yīng)用成為可能。然而,在實(shí)時(shí)應(yīng)用場(chǎng)景中部署立體視覺系統(tǒng)時(shí),常常面臨以下幾個(gè)挑戰(zhàn):圖像處理

中科慧眼三目立體視覺產(chǎn)品的功能優(yōu)勢(shì)
2025年上海國(guó)際車展已正式開幕,三目立體視覺產(chǎn)品作為推動(dòng)智駕平權(quán)的關(guān)鍵力量,也在全民智駕時(shí)代備受矚目。
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】視覺實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
的有效途徑。
結(jié)語
本書第7章和第8章內(nèi)容系統(tǒng)性強(qiáng),從基礎(chǔ)理論到代碼實(shí)踐,為讀者提供了機(jī)器人視覺與SLAM的完整知識(shí)框架。未來,我計(jì)劃結(jié)合書中案例,進(jìn)一步探索多傳感器融合、自主導(dǎo)航等高級(jí)應(yīng)用,爭(zhēng)取在機(jī)器人感知領(lǐng)域有更深入的研究
發(fā)表于 05-03 19:41
智能導(dǎo)視:引領(lǐng)未來導(dǎo)航的創(chuàng)新力量
一、定義與背景 智能導(dǎo)視系統(tǒng)是融合人工智能、大數(shù)據(jù)、物聯(lián)網(wǎng)等先進(jìn)技術(shù)的綜合性導(dǎo)航解決方案。該系統(tǒng)突破傳統(tǒng)導(dǎo)視系統(tǒng)靜態(tài)展示的局限性,高度重視互動(dòng)性、精準(zhǔn)性、有效性與趣味性。用戶可借助交互式觸摸屏、手機(jī)

【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+ROS2應(yīng)用案例
這一部分內(nèi)容,我掌握了如何在ROS 2中實(shí)現(xiàn)SLAM,這對(duì)于提高機(jī)器人的自主導(dǎo)航能力具有重要意義。
其他內(nèi)容概述
除了二維碼識(shí)別和SLAM技術(shù),書中還介紹了其他視覺應(yīng)用和地圖構(gòu)建的內(nèi)
發(fā)表于 04-27 11:42
中科慧眼三目立體視覺相機(jī)將亮相2025上海車展
2025年上海國(guó)際車展開幕在即,這場(chǎng)全球矚目的行業(yè)盛會(huì)不僅是車企競(jìng)技的舞臺(tái),更是前沿技術(shù)趨勢(shì)的風(fēng)向標(biāo)。隨著智能駕駛加速邁向“全民普惠”時(shí)代,三目立體視覺技術(shù)正以其低成本、高精度、強(qiáng)適配性的優(yōu)勢(shì),成為推動(dòng)智駕平權(quán)的關(guān)鍵力量。
托盤“智”運(yùn),SLAM導(dǎo)航 地牛式AGV機(jī)器人,“7*24小時(shí)”工作!
AGV地牛小巧靈活,載重大,采用激光SLAM導(dǎo)航,可智能控制路線。支持定制化云平臺(tái)監(jiān)控,多級(jí)安全措施保障安全。適用于多行業(yè)倉(cāng)儲(chǔ)物流,提高搬運(yùn)效率,降低人力投入。

用于任意排列多相機(jī)的通用視覺里程計(jì)系統(tǒng)
如何讓多相機(jī)視覺SLAM系統(tǒng)更易于部署且對(duì)環(huán)境更具魯棒性?本文提出了一種適用于任意排列多相機(jī)的通用視覺里程計(jì)系統(tǒng)。在KITTI-360和MultiCamData數(shù)據(jù)集上驗(yàn)證了該方法對(duì)于任意放置相機(jī)的魯棒性。與其他

AGV激光導(dǎo)航定位技術(shù)與構(gòu)建地圖
AGV是制造物流重要設(shè)備,激光導(dǎo)航AGV高可靠靈活,SLAM技術(shù)關(guān)鍵,激光SLAM成熟且落地豐富,無需人工標(biāo)志物,復(fù)合式激光導(dǎo)航兼顧可靠性與靈活性,激光

現(xiàn)代海上的電子指南針——艦艇慣導(dǎo)系統(tǒng)
艦艇慣導(dǎo)系統(tǒng)通過慣性測(cè)量裝置獲取艦艇運(yùn)動(dòng)參數(shù),實(shí)現(xiàn)自主、連續(xù)、隱蔽的導(dǎo)航,提供航向、速度等關(guān)鍵信息。未來趨勢(shì)包括高精度化、多傳感器融合和自主導(dǎo)航能力提升,為船舶航行帶來更多便利和安全。
一種適用于動(dòng)態(tài)環(huán)境的實(shí)時(shí)視覺SLAM系統(tǒng)
既能保證效率和精度,又無需GPU,行業(yè)第一個(gè)達(dá)到此目標(biāo)的視覺動(dòng)態(tài)SLAM系統(tǒng)。

圖像信號(hào)處理板設(shè)計(jì)原理圖:531-基于3U PXIe 的ZU7EV的通用主控板
ZU7EV板卡 , 雷達(dá)信號(hào)處理 , 視覺處理卡 , 3U PXIe , 圖像信號(hào)分析
立體視覺新手必看:英特爾? 實(shí)感? D421深度相機(jī)模組
入門級(jí)立體深度模組,旨在以高性價(jià)比將先進(jìn)的深度感應(yīng)技術(shù)帶給更廣泛的用戶群體,為尋求深度成像技術(shù)及消費(fèi)產(chǎn)品潛力的開發(fā)者、研究人員和計(jì)算機(jī)視覺專家提供卓越的價(jià)值,將先進(jìn)的3D視覺技術(shù)拓展至更廣泛的應(yīng)用領(lǐng)域。 英特爾? 實(shí)感? 深度相





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論